
阅读量:0
最近在做实验,需要改进YOLOv8,去网上找了很多教程都是充钱才能看的,NND这对一个一餐只能吃两个菜的大学生来说是多么的痛苦,所以自己去找代码手动改了一下,成功实现YOLOv8改进添加swin transformer,本人水平有限,改得不对的地方请自行改正。
第一步,在ultralytics\nn\modules\block.py代码中的最后部分中添加swin transformer代码,代码如下:
#----------swintf----C3STR--------------------------------- class SwinTransformerBlock(nn.Module): def __init__(self, c1, c2, num_heads, num_layers, window_size=8): super().__init__() self.conv = None if c1 != c2: self.conv = Conv(c1, c2) # remove input_resolution self.blocks = nn.Sequential(*[SwinTransformerLayer(dim=c2, num_heads=num_heads, window_size=window_size, shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)]) def forward(self, x): if self.conv is not None: x = self.conv(x) x = self.blocks(x) return x class WindowAttention(nn.Module): def __init__(self, dim, window_size, num_heads, qkv_bias=True, qk_scale=None, attn_drop=0., proj_drop=0.): super().__init__() self.dim = dim self.window_size = window_size # Wh, Ww self.num_heads = num_heads head_dim = dim // num_heads self.scale = qk_scale or head_dim ** -0.5 # define a parameter table of relative position bias self.relative_position_bias_table = nn.Parameter( torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads)) # 2*Wh-1 * 2*Ww-1, nH # get pair-wise relative position index for each token inside the window coords_h = torch.arange(self.window_size[0]) coords_w = torch.arange(self.window_size[1]) coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2 relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0 relative_coords[:, :, 1] += self.window_size[1] - 1 relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1 relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww self.register_buffer("relative_position_index", relative_position_index) self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias) self.attn_drop = nn.Dropout(attn_drop) self.proj = nn.Linear(dim, dim) self.proj_drop = nn.Dropout(proj_drop) nn.init.normal_(self.relative_position_bias_table, std=.02) self.softmax = nn.Softmax(dim=-1) def forward(self, x, mask=None): B_, N, C = x.shape qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4) q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple) q = q * self.scale attn = (q @ k.transpose(-2, -1)) relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view( self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww attn = attn + relative_position_bias.unsqueeze(0) if mask is not None: nW = mask.shape[0] attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0) attn = attn.view(-1, self.num_heads, N, N) attn = self.softmax(attn) else: attn = self.softmax(attn) attn = self.attn_drop(attn) # print(attn.dtype, v.dtype) try: x = (attn @ v).transpose(1, 2).reshape(B_, N, C) except: # print(attn.dtype, v.dtype) x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C) x = self.proj(x) x = self.proj_drop(x) return x class Mlp(nn.Module): def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.): super().__init__() out_features = out_features or in_features hidden_features = hidden_features or in_features self.fc1 = nn.Linear(in_features, hidden_features) self.act = act_layer() self.fc2 = nn.Linear(hidden_features, out_features) self.drop = nn.Dropout(drop) def forward(self, x): x = self.fc1(x) x = self.act(x) x = self.drop(x) x = self.fc2(x) x = self.drop(x) return x class SwinTransformerLayer(nn.Module): def __init__(self, dim, num_heads, window_size=8, shift_size=0, mlp_ratio=4., qkv_bias=True, qk_scale=None, drop=0., attn_drop=0., drop_path=0., act_layer=nn.SiLU, norm_layer=nn.LayerNorm): super().__init__() self.dim = dim self.num_heads = num_heads self.window_size = window_size self.shift_size = shift_size self.mlp_ratio = mlp_ratio # if min(self.input_resolution) <= self.window_size: # # if window size is larger than input resolution, we don't partition windows # self.shift_size = 0 # self.window_size = min(self.input_resolution) assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size" self.norm1 = norm_layer(dim) self.attn = WindowAttention( dim, window_size=(self.window_size, self.window_size), num_heads=num_heads, qkv_bias=qkv_bias, qk_scale=qk_scale, attn_drop=attn_drop, proj_drop=drop) self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity() self.norm2 = norm_layer(dim) mlp_hidden_dim = int(dim * mlp_ratio) self.mlp = Mlp(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop) def create_mask(self, H, W): # calculate attention mask for SW-MSA img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1 h_slices = (slice(0, -self.window_size), slice(-self.window_size, -self.shift_size), slice(-self.shift_size, None)) w_slices = (slice(0, -self.window_size), slice(-self.window_size, -self.shift_size), slice(-self.shift_size, None)) cnt = 0 for h in h_slices: for w in w_slices: img_mask[:, h, w, :] = cnt cnt += 1 def window_partition(x, window_size): """ Args: x: (B, H, W, C) window_size (int): window size Returns: windows: (num_windows*B, window_size, window_size, C) """ B, H, W, C = x.shape x = x.view(B, H // window_size, window_size, W // window_size, window_size, C) windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C) return windows def window_reverse(windows, window_size, H, W): """ Args: windows: (num_windows*B, window_size, window_size, C) window_size (int): Window size H (int): Height of image W (int): Width of image Returns: x: (B, H, W, C) """ B = int(windows.shape[0] / (H * W / window_size / window_size)) x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1) x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1) return x mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1 mask_windows = mask_windows.view(-1, self.window_size * self.window_size) attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2) attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0)) return attn_mask def forward(self, x): # reshape x[b c h w] to x[b l c] _, _, H_, W_ = x.shape Padding = False if min(H_, W_) < self.window_size or H_ % self.window_size != 0 or W_ % self.window_size != 0: Padding = True # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.') pad_r = (self.window_size - W_ % self.window_size) % self.window_size pad_b = (self.window_size - H_ % self.window_size) % self.window_size x = F.pad(x, (0, pad_r, 0, pad_b)) # print('2', x.shape) B, C, H, W = x.shape L = H * W x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c # create mask from init to forward if self.shift_size > 0: attn_mask = self.create_mask(H, W).to(x.device) else: attn_mask = None shortcut = x x = self.norm1(x) x = x.view(B, H, W, C) # cyclic shift if self.shift_size > 0: shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2)) else: shifted_x = x def window_partition(x, window_size): """ Args: x: (B, H, W, C) window_size (int): window size Returns: windows: (num_windows*B, window_size, window_size, C) """ B, H, W, C = x.shape x = x.view(B, H // window_size, window_size, W // window_size, window_size, C) windows = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(-1, window_size, window_size, C) return windows def window_reverse(windows, window_size, H, W): """ Args: windows: (num_windows*B, window_size, window_size, C) window_size (int): Window size H (int): Height of image W (int): Width of image Returns: x: (B, H, W, C) """ B = int(windows.shape[0] / (H * W / window_size / window_size)) x = windows.view(B, H // window_size, W // window_size, window_size, window_size, -1) x = x.permute(0, 1, 3, 2, 4, 5).contiguous().view(B, H, W, -1) return x # partition windows x_windows = window_partition(shifted_x, self.window_size) # nW*B, window_size, window_size, C x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C # W-MSA/SW-MSA attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C # merge windows attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C) shifted_x = window_reverse(attn_windows, self.window_size, H, W) # B H' W' C # reverse cyclic shift if self.shift_size > 0: x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2)) else: x = shifted_x x = x.view(B, H * W, C) # FFN x = shortcut + self.drop_path(x) x = x + self.drop_path(self.mlp(self.norm2(x))) x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w if Padding: x = x[:, :, :H_, :W_] # reverse padding return x class C3STR(C3): # C3 module with SwinTransformerBlock() def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5): super().__init__(c1, c2, n, shortcut, g, e) c_ = int(c2 * e) num_heads = c_ // 32 self.m = SwinTransformerBlock(c_, c_, num_heads, n) 在开头引入代码:from timm.models.layers import DropPath, to_2tuple, trunc_normal_
一般是没有的,先在自己的环境下输入:pip install timm -i https://mirrors.bfsu.edu.cn/pypi/web/simple下载
第二步:ultralytics\nn\modules_init_.py中添加 C3STR,首先在from .block import 中添加如下:
from .block import ( C1, C2, C3, C3TR, DFL, SPP, SPPF, Bottleneck, BottleneckCSP, C2f, C2fAttn, ImagePoolingAttn, C3Ghost, C3x, GhostBottleneck, HGBlock, HGStem, Proto, RepC3, ResNetLayer, ContrastiveHead, BNContrastiveHead, RepNCSPELAN4, ADown, SPPELAN, CBFuse, CBLinear, Silence, C3STR,#添加swin_transfomer ) 添加后如下图:
在__all__ 中添加如下代码:
__all__ = ( "Conv", "Conv2", "LightConv", "RepConv", "DWConv", "DWConvTranspose2d", "ConvTranspose", "Focus", "GhostConv", "ChannelAttention", "SpatialAttention", "CBAM", "Concat", "TransformerLayer", "TransformerBlock", "MLPBlock", "LayerNorm2d", "DFL", "HGBlock", "HGStem", "SPP", "SPPF", "C1", "C2", "C3", "C2f", "C2fAttn", "C3x", "C3TR", "C3Ghost", "GhostBottleneck", "Bottleneck", "BottleneckCSP", "Proto", "Detect", "Segment", "Pose", "Classify", "TransformerEncoderLayer", "RepC3", "RTDETRDecoder", "AIFI", "DeformableTransformerDecoder", "DeformableTransformerDecoderLayer", "MSDeformAttn", "MLP", "ResNetLayer", "OBB", "WorldDetect", "ImagePoolingAttn", "ContrastiveHead", "BNContrastiveHead", "RepNCSPELAN4", "ADown", "SPPELAN", "CBFuse", "CBLinear", "Silence", "GAMAttention",#修改添加GAM "C3STR",#添加swin_transfomer ) 添加后如下图:
第三步,在ultralytics\nn\tasks.py中添加C3STR,首先在from ultralytics.nn.modules import处添加,效果如下:
from ultralytics.nn.modules import ( AIFI, C1, C2, C3, C3TR, OBB, SPP, SPPF, Bottleneck, BottleneckCSP, C2f, C2fAttn, ImagePoolingAttn, C3Ghost, C3x, Classify, Concat, Conv, Conv2, ConvTranspose, Detect, DWConv, DWConvTranspose2d, Focus, GhostBottleneck, GhostConv, HGBlock, HGStem, Pose, RepC3, RepConv, ResNetLayer, RTDETRDecoder, Segment, WorldDetect, RepNCSPELAN4, ADown, SPPELAN, CBFuse, CBLinear, Silence, GAMAttention, C3STR, ) 添加后图如下:
其次:按住 Ctrl+F 输入if m in在如下图位置输入: C3STR
第四步,在ultralytics\cfg\models\v8中复制yolov8.yaml文件,修改如下:
# Ultralytics YOLO 🚀, AGPL-3.0 license # YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect # Parameters nc: 1 # number of classes scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n' # [depth, width, max_channels] n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs # YOLOv8.0n backbone backbone: # [from, repeats, module, args] - [-1, 1, Conv, [64, 3, 2]] # 0-P1/2 - [-1, 1, Conv, [128, 3, 2]] # 1-P2/4 - [-1, 3, C2f, [128, True]] - [-1, 1, Conv, [256, 3, 2]] # 3-P3/8 - [-1, 6, C2f, [256, True]] - [-1, 1, Conv, [512, 3, 2]] # 5-P4/16 - [-1, 6, C2f, [512, True]] - [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32 - [-1, 3, C2f, [1024, True]] - [-1, 3, C3STR, [1024]] - [-1, 1, SPPF, [1024, 5]] # 10 # YOLOv8.0n head head: - [-1, 1, nn.Upsample, [None, 2, "nearest"]] - [[-1, 6], 1, Concat, [1]] # cat backbone P4 - [-1, 3, C2f, [512]] # 13 - [-1, 1, nn.Upsample, [None, 2, "nearest"]] - [[-1, 4], 1, Concat, [1]] # cat backbone P3 - [-1, 3, C2f, [256]] # 16 (P3/8-small) - [-1, 1, Conv, [256, 3, 2]] - [[-1, 12], 1, Concat, [1]] # cat head P4 - [-1, 3, C2f, [512]] # 19 (P4/16-medium) - [-1, 1, Conv, [512, 3, 2]] - [[-1, 9], 1, Concat, [1]] # cat head P5 - [-1, 3, C2f, [1024]] # 22 (P5/32-large) - [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5) 在本项目中创建一个train.py文件,大致代码为:
from ultralytics import YOLO #import os #os.environ['CUDA_VISIBLE_DEVICES']='1' if __name__ == '__main__': # Load a model model = YOLO(r'E:\yolov8_car_deepsort\yolov8_car\ultralytics\cfg\models\v8\yolov8-Swin_transformer.yaml') # 不使用预训练权重训练 # model = YOLO(r'yolov8p.yaml').load("yolov8n.pt") # 使用预训练权重训练 # Trainparameters ---------------------------------------------------------------------------------------------- model.train( data=r'E:\yolov8_car_deepsort\yolov8_car\ultralytics\cfg\datasets\mycar.yaml', epochs= 300 , # (int) number of epochs to train for batch= 16 , # (int) number of images per batch (-1 for AutoBatch) imgsz= 640 , # (int) size of input images as integer or w,h save= True , # (bool) save train checkpoints and predict results save_period= -1, # (int) Save checkpoint every x epochs (disabled if < 1) project= 'result', # (str, optional) project name name= 'yolov8-Swin_transformer' ,# (str, optional) experiment name, results saved to 'project/name' directory resume=True ) 运行结果: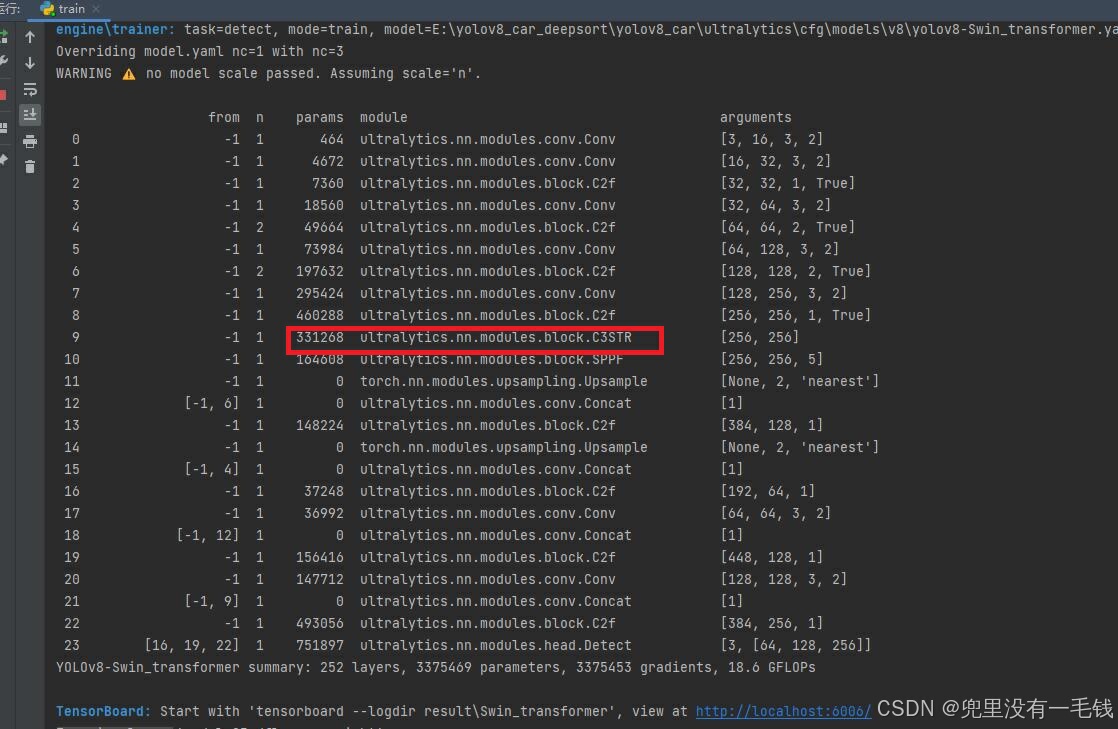
表示成功,添加位置很多,具体添加情况看个人
