
阅读量:0
01 引言
在上一篇文章中,我们提及到ModBusTCP属于低实时性总线,EtherCAT总线属于高实时性总线。Modbus协议在早期工业自动化领域中被非常广泛使用。然而,随着技术的发展,EtherCAT协议逐渐取代了Modbus协议,成为了许多应用场景的首选。本文将详细解说Modbus协议为何会被EtherCAT取代,以及被取代的应用场景有哪些。

02 基本概念
首先,我们需要了解Modbus协议和EtherCAT协议的基本概念。
Modbus协议是一种串行通信协议,最早由Modicon公司(现在的施耐德)于1979年发布。它是一种简单的、易于实现的协议,主要用于连接工业电子设备。Modbus协议基于请求/响应模型,主设备发送请求,从设备返回响应。即一个主设备与多个从设备进行通信。Modbus协议支持多种通信方式,如RS-232、RS-485、TCP/IP等。
Modbus协议有两种传输模式:RTU(远程终端单元)和TCP(传输控制协议)。Modbus RTU主要用于串行通信,而Modbus TCP则用于以太网通信。主要用于连接工业设备,如PLC、控制器、传感器等。它使用主从通信模式Modbus协议的优点是简单易用,但缺点是通信速度较慢,实时性较差。
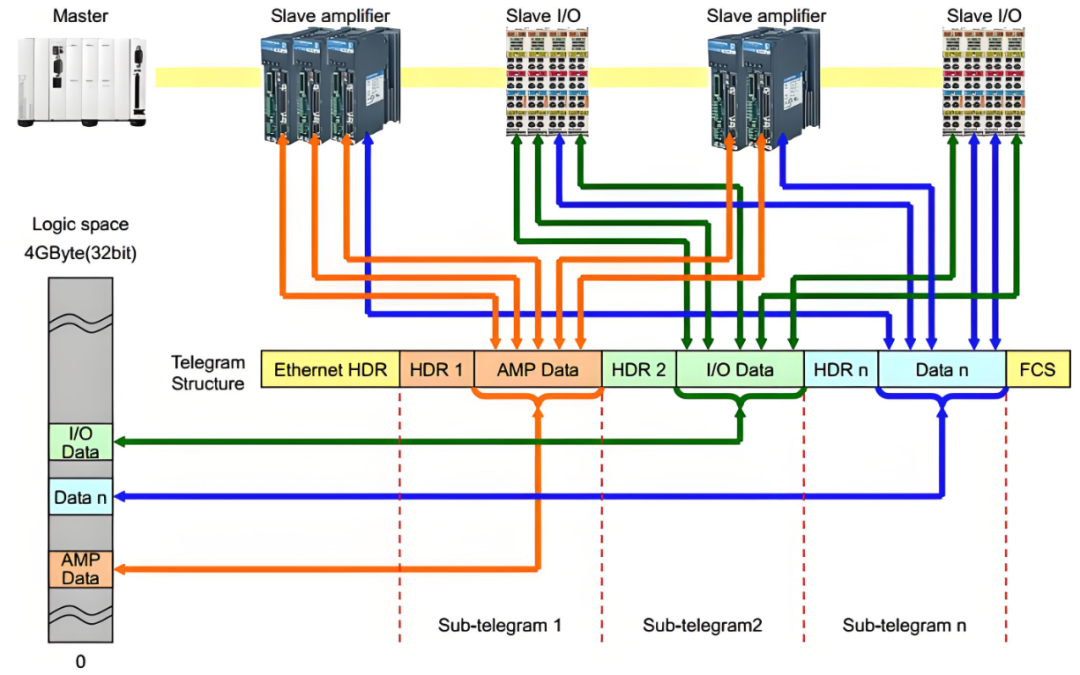
EtherCAT协议是一种实时以太网协议,由德国的Beckhoff Automation公司于2003年开发。EtherCAT协议基于主从架构,主设备发送数据帧,从设备处理数据帧并返回响应。EtherCAT协议具有高速、实时性强、精确同步等特点,适用于对实时性要求较高的应用场景。
03 MODBUS被EtherCAT取代的原因
那么,为什么EtherCAT协议会取代MODBUS协议呢?这主要是由于以下几个原因:
1. 速度和性能
EtherCAT协议的通信速度远高于Modbus协议。EtherCAT协议可以支持100Mbps甚至10Gbps的通信速度,而Modbus协议的通信速度通常只有几十kbps到几百kbps。EtherCAT协议支持更高的数据吞吐量,可以同时处理更多的I/O数据。因此,对于需要高速通信的应用场景,EtherCAT协议更具优势。

2. 实时性和确定性
EtherCAT协议具有实时性和确定性的特点,可以满足对实时性要求较高的应用场景。而Modbus协议的实时性较差,无法满足这些场景的需求。例如,在运动控制、机器人等领域,对实时性的要求非常高,EtherCAT协议可以提供更好的解决方案。
EtherCAT分布式时钟纳秒级同步精度
3. 网络拓扑和可拓展性
EtherCAT协议支持更灵活的网络拓扑。EtherCAT协议采用菊花链式拓扑结构,可以实现多主机和多从机之间的高速通信,而Modbus协议通常只支持点对点的通信方式。因此,对于需要复杂网络拓扑的应用场景,EtherCAT协议更具优势。
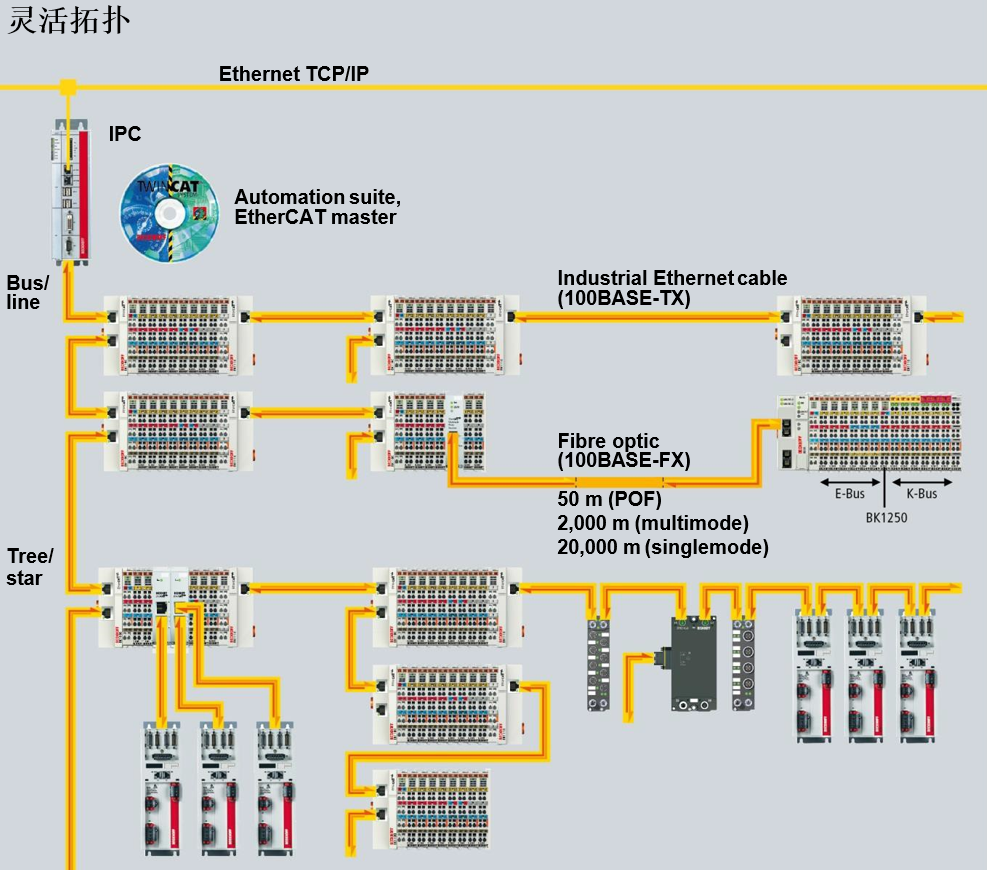
EtherCAT支持多种拓扑结构,如总线型、星型、树型和环型等
4. 兼容性和互操作性
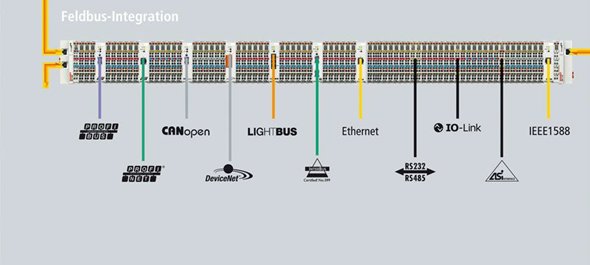
EtherCAT协议是基于标准的以太网技术,可以与现有的以太网设备兼容。而Modbus协议需要特定的硬件和软件支持,兼容性较差。此外,EtherCAT协议具有更好的互操作性,可以与其他实时以太网协议共存,方便系统集成和扩展。
5.安全性
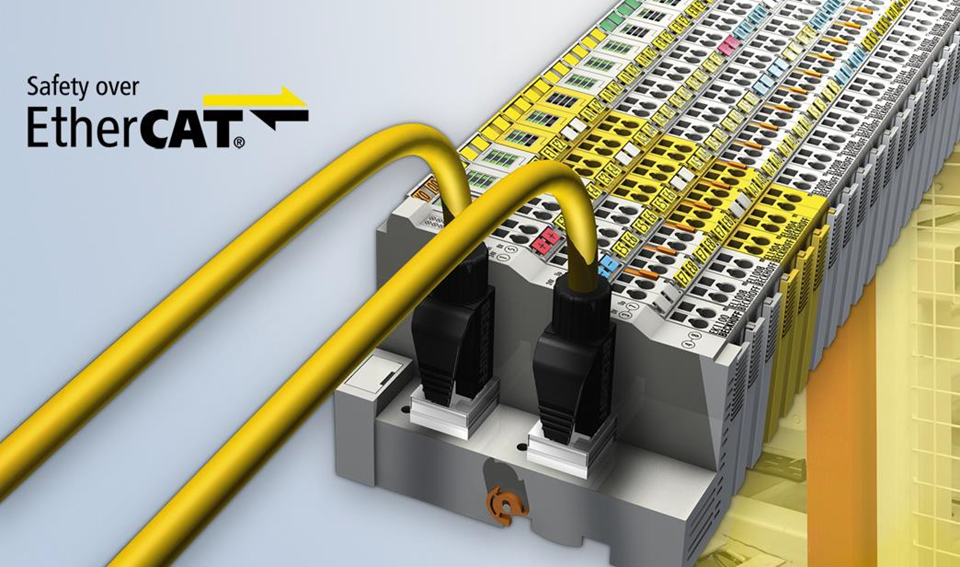
Modbus协议本身没有加密和认证机制,非常容易受到黑客攻击和数据篡改,安全性漏洞很大。EtherCAT协议的安全性解决方案基于Safety over EtherCAT协议,该协议通过德国技术检验协会(TÜV)的评估,并被认证为符合IEC 61508 SIL 3标准的用于在Safety over EtherCAT设备之间传输过程数据的协议。
6. 诊断和维护
Modbus协议的诊断和维护相对困难,因为它是基于请求-响应机制的,需要逐个设备进行通信和故障排除。而EtherCAT协议提供了丰富的诊断和维护功能,可以通过主站对整个网络进行监控和故障排除。因此,在需要高效诊断和维护的应用场景中,EtherCAT协议更适合取代Modbus协议。

EtherCAT支持断点检测、精确定位传输错误、一代逻辑诊断域
7. 成本和易用性
MODBUS协议的设备成本相对较低,但是它需要较多的通信线路和设备,增加了布线和维护的成本。虽然EtherCAT协议的性能优于Modbus协议,但其成本并不一定高于Modbus协议。随着EtherCAT技术的普及,国产ESC芯片的大量投产,现在国产EtherCAT的ESC芯片价格也非常亲民。随着支持EtherCAT应用设备的厂商越来越多,EtherCAT协议的易用性也得到了提高,许多厂商提供了丰富的技术支持和文档,方便用户快速上手。

ET1100、ET1200芯片的国产替代私信推荐
04 EtherCAT取代Modbus的应用场景
那么,被EtherCAT取代的Modbus应用场景有哪些呢?以下是一些典型的例子:
1. 高速生产线
在高速生产线中,设备之间的通信速度和实时性要求非常高。在这种情况下,Modbus协议无法满足需求,而EtherCAT协议则可以提供高速、实时的通信服务。

半导体行业采用EtherCAT总线的生产过程
2. 运动控制
在运动控制领域,对实时性和精确性的要求非常高。EtherCAT协议可以提供更短的循环时间和更高的数据吞吐量,满足运动控制的需求。因此,许多运动控制器和伺服驱动器采用支持EtherCAT协议,取代了传统的Modbus协议。
3. 机器人
在机器人领域,对实时性和同步性的要求非常高。EtherCAT协议可以实现高精度的同步控制,满足机器人的需求。因此,许多机器人制造商开始采用EtherCAT协议,取代了传统的Modbus协议。
4. 工业自动化系统
在大型工业自动化系统中,对网络拓扑和可扩展性的要求较高。EtherCAT协议支持多种网络拓扑,可以方便地扩展系统规模。因此,许多工业自动化系统开始采用EtherCAT协议,取代了传统的Modbus协议。
5. 数据采集和监控
在数据采集和监控领域,对实时性和数据吞吐量的要求较高。EtherCAT协议可以提供更快的数据采集速度和更高的数据吞吐量,满足这些需求。因此,许多数据采集和监控系统开始采用EtherCAT协议,取代了传统的Modbus协议。比如磁悬浮的数据传输和高效的视觉检测的数据传输

05 总结
在工业通信领域,Modbus协议凭借其悠久的历史和广泛的应用,一直占据着重要的地位。然而,随着工业4.0和智能制造的兴起,对通信协议的性能要求也在不断提高。EtherCAT协议以其出色的实时性、速度、网络拓扑和兼容性,逐渐在许多场景中取代了Modbus协议,成为首选。尽管如此,Modbus协议仍然在简单的设备控制和数据采集等特定应用中发挥着重要作用。未来,我们有理由相信,EtherCAT协议将在更多领域取得突破,推动工业自动化向更高水平发展。
在此,我们向Modbus协议致敬,感谢其为工业通信所做的长期贡献。
