
阅读量:0
西门子S7-1200PLC和KTP700触摸屏控制松下伺服电机运动控制程序4
程序简介:可以实现伺服电机的正转、反转控制,相对运动,显示电机的当前位置、速度和运行状态
硬件平台:西门子S7-1200PLC(CPU1215C)+西门子KTP700触摸屏+伺服电机+伺服电机控制器
软件平台:博图V13 SP1,(V14版本可以兼容打开)
通讯协议:以太网通讯
触摸屏ip地址:192.168.0.3
PLC的IP地址:192.168.0.1
ID:4915612129242095
z***6
西门子S7-1200PLC和KTP700触摸屏控制松下伺服电机运动控制程序
概述
本文将介绍如何利用西门子S7-1200PLC和KTP700触摸屏控制松下伺服电机的运动控制程序。该程序可以实现伺服电机的正转、反转控制,相对运动,并显示电机的当前位置、速度和运行状态。硬件平台包括西门子S7-1200PLC(CPU1215C)、西门子KTP700触摸屏、伺服电机以及伺服电机控制器。软件平台使用博图V13 SP1,同时也兼容V14版本。通讯协议选用以太网通讯,并配置触摸屏和PLC的IP地址分别为192.168.0.3和192.168.0.1。
程序功能
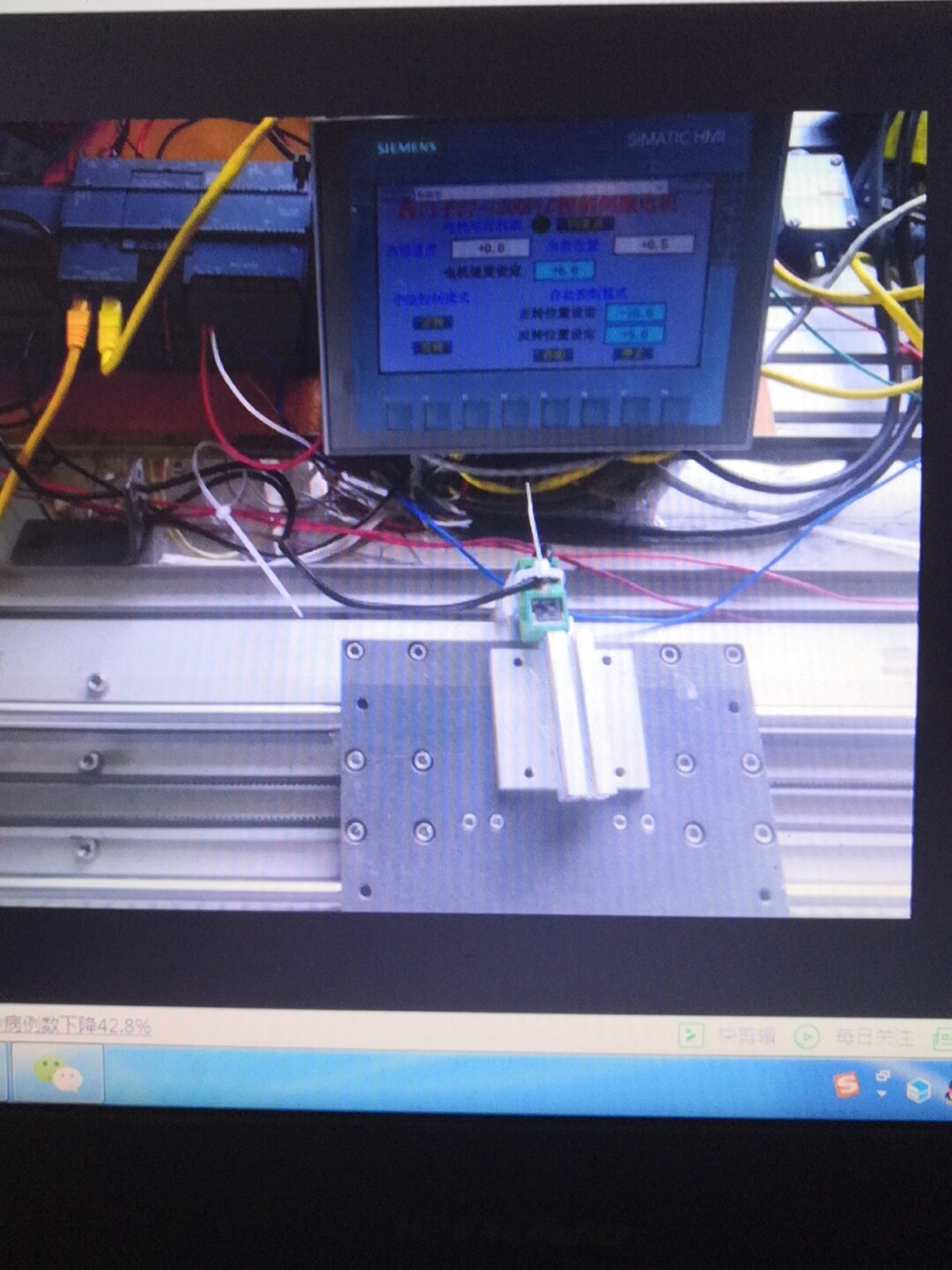
本程序实现了伺服电机的控制功能,包括正转、反转控制,相对运动以及显示当前位置、速度和运行状态。通过触摸屏界面,用户可以方便地进行操作和监控。
硬件配置
本程序采用西门子S7-1200PLC(CPU1215C)作为控制器,搭配KTP700触摸屏和松下伺服电机完成电机的运动控制。PLC与KTP700触摸屏通过以太网通讯连接,IP地址分别为192.168.0.1和192.168.0.3。
软件配置
本程序使用博图V13 SP1(也兼容V14版本)进行编程。通过编程实现与触摸屏的通讯以及电机的控制和监测。
通讯设置
在博图中进行通讯设置,确保PLC和触摸屏能够正常通讯。设置触摸屏的IP地址为192.168.0.3,PLC的IP地址为192.168.0.1。
程序编写
首先,我们需要编写程序来实现伺服电机的控制和监测功能。在编写程序之前,需要先了解S7-1200PLC和KTP700触摸屏的指令和功能模块。根据硬件平台的要求,选择相应的指令和功能模块进行编程。
正转和反转控制
为了实现正转和反转控制,我们可以使用S7-1200PLC的输出模块来控制伺服电机的运动方向。通过设置输出信号的状态为高或低,实现正转或反转。同时,我们还需要设置一个触摸屏按钮,通过触摸屏来触发正转或反转控制。
相对运动控制
为了实现相对运动控制,我们可以利用PLC的计数器模块。首先,我们需要在程序中定义一个计数器,然后根据用户输入的相对运动距离来设定计数器的目标值。通过监测计数器的值,可以实时更新电机的位置信息。在触摸屏上设置相对运动距离的输入框,用户可以通过输入相对距离来控制电机的相对运动。
显示当前位置、速度和运行状态
为了显示电机的当前位置、速度和运行状态,我们可以利用触摸屏的文本显示功能。在触摸屏上创建对应的文本显示框,并将相应变量与文本框关联起来。通过监测电机的位置和速度变量,可以实时更新触摸屏上的显示。
总结
通过本程序,我们可以实现对松下伺服电机的运动控制和监测。通过触摸屏界面,用户可以方便地进行正转、反转控制,相对运动控制,并实时显示电机的当前位置、速度和运行状态。硬件平台包括西门子S7-1200PLC(CPU1215C)、西门子KTP700触摸屏、伺服电机以及伺服电机控制器。软件平台使用博图V13 SP1(兼容V14版本),通讯采用以太网通讯协议,触摸屏和PLC的IP地址分别设置为192.168.0.3和192.168.0.1。
通过本文的介绍,读者可以了解如何利用西门子S7-1200PLC和KTP700触摸屏来实现对松下伺服电机的运动控制。同时,读者还可以了解到硬件和软件的配置,以及程序的编写和功能实现。希望本文对读者在实际项目中能够有所帮助,并能够进一步深入学习和应用相关技术。
相关的代码,程序地址如下:http://imgcs.cn/612129242095.html
