
阅读量:0
Sobel求导-边缘检测
原理
图像中的边缘线是像素值显著变化的边界,而在数学上确定一个函数发生显著变化的位置的方法就是求导。
假设有一个1维的图片 f ( t ) f(t) f(t),在 t t t处有颜色值的显著变化: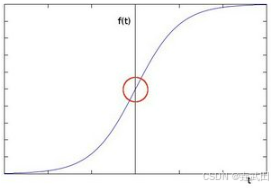
对 f ( t ) f(t) f(t)求一阶导数 f ′ ( t ) f'(t) f′(t),可以很轻易发现在相应位置的一个导数的最大值: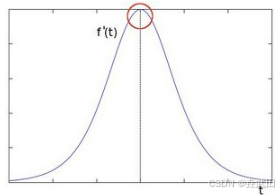
Sobel算子
- Sobel算子是一个离散微分算子,计算图片颜色值变化的近似斜率
- Sobel算子将高斯平滑和微分算法结合起来了
公式
设要被进行计算的图片为 I I I,则:
- 水平变化 G x G_x Gx可以通过将 I I I和奇数方的卷积核进行卷积运算得到,比如,使用一个 3 × 3 3 \times 3 3×3的卷积核,可以算得:
G x = [ − 1 0 + 1 − 2 0 + 2 − 1 0 + 1 ] ∗ I G_x= \begin{bmatrix} -1 & 0 & +1 \\ -2 & 0 & +2 \\ -1 & 0 & +1 \end{bmatrix} * I Gx=−1−2−1000+1+2+1∗I - 同样的,将这个卷积核逆时针旋转90度之后,再和 I I I进行卷积运算,就可以得到垂直变化 G y G_y Gy:
G y = [ − 1 − 2 − 1 0 0 0 + 1 + 2 + 1 ] ∗ I G_y= \begin{bmatrix} -1 & -2 & -1 \\ 0 & 0 & 0 \\ +1 & +2 & +1 \end{bmatrix} * I Gy=−10+1−20+2−10+1∗I - 这样,近似斜率 G G G就可以通过这两个方向上的变化求得:
G = G x 2 + G y 2 G=\sqrt{G_x^2+G_y^2} G=Gx2+Gy2
或者可以近似简化为:
G = ∣ G x ∣ + ∣ G y ∣ G = |G_x|+|G_y| G=∣Gx∣+∣Gy∣
Scharr算法
当卷积核的尺寸较小的时候,比如 3 × 3 3 \times 3 3×3,Sobel计算出的斜率会很不精确,因为毕竟它只是对一个离散的对象进行近似求导。
OpenCV使用Scharr()函数来用 3 × 3 3 \times 3 3×3的卷积核进行近似求导,从而解决Sobel算法的不精确的问题。Scharr算法使用的卷积核如下:
G x = [ − 3 0 + 3 − 10 0 + 10 − 3 0 + 3 ] G_x= \begin{bmatrix} -3 & 0 & +3 \\ -10 & 0 & +10 \\ -3 & 0 & +3 \end{bmatrix} Gx=−3−10−3000+3+10+3
G y = [ − 3 − 10 − 3 0 0 0 + 3 + 10 + 3 ] G_y= \begin{bmatrix} -3 & -10 & -3 \\ 0 & 0 & 0 \\ +3 & +10 & +3 \end{bmatrix} Gy=−30+3−100+10−30+3
API
Sobel函数的原型如下:
void cv::Sobel( InputArray src, //输入图 OutputArray dst, //输出图 int ddepth, //输出图的数据类型 int dx, //水平变化的顺序 int dy, //垂直变化的顺序 int Ksize = 3, //卷积核的尺寸,可以是1、3、5或7,默认为3 double scale = 1, //对计算结果的放大系数,默认为1,即不放大 double delta = 0, //对计算结果的偏移值,默认是0,即不偏移 int borderType = BORDER_DEFAULT)//图片边缘的扩充类型,不能是BORDER_WRAP,默认是镜像复制
dx、dy和Ksize三个参数共同决定了该方法所使用的卷积核:
* 如果dx=1, dy=0, Ksize=3,那么就是上一张中的水平差异计算中使用的卷积核,即:
[ − 1 0 + 1 − 2 0 + 2 − 1 0 + 1 ] \begin{bmatrix} -1 & 0 & +1 \\ -2 & 0 & +2 \\ -1 & 0 & +1 \end{bmatrix} −1−2−1000+1+2+1
* 如果dx=0, dy=1, Ksize=3,那么就是上一张中的水平差异计算中使用的卷积核,即:
[ − 1 − 2 − 1 0 0 0 + 1 + 2 + 1 ] \begin{bmatrix} -1 & -2 & -1 \\ 0 & 0 & 0 \\ +1 & +2 & +1 \end{bmatrix} −10+1−20+2−10+1- 如果
Ksize= #FILTER_SCHARR(-1),则表明使用Scharr算法。- 当
Ksize = 1时,该方法使用 1 × 3 1 \times 3 1×3或 3 × 1 3 \times 1 3×1的卷积核,因此没有高斯分布,而且只能用在求一阶或二阶导数的时候。
Scharr()函数的原型与Sobel()函数类似,只是没有了Ksize参数:
void cv::Scharr(InputArray src, OutputArray dst, int ddepth, int dx, int dy, double scale = 1, double delta = 0, int borderType = BORDER_DEFAULT) 实例
在进行Sobel计算之前,需要先减少图片中的噪音,可以使用高斯平滑:
Mat blured; GaussianBlur(src, blured, Size(3, 3), 0, 0, BORDER_DEFAULT); 然后进行灰度化,以便更好地显示边缘线:
Mat gray; cvtColor(blured, gray, COLOR_BGR2GRAY); 接着,分别计算水平差异和垂直差异(都使用 3 × 3 3 \times 3 3×3的卷积核):
Mat Gx, Gy; Sobel(gray, Gx, -1, 1, 0, 3, 1, 0, BORDER_DEFAULT); Sobel(gray, Gy, -1, 0, 1, 3, 1, 0, BORDER_DEFAULT); 这样就可以计算近似斜率了,这里使用了简化的算法,即它们绝对值的和:
//取绝对值 Mat abs_Gx, abs_Gy; convertScaleAbs(Gx, abs_Gx); convertScaleAbs(Gy, abs_Gy); //计算近似斜率 Mat G; addWeighted(abs_Gx, 0.5, abs_Gy, 0.5, 0, G); 这样就完成了整个边缘检测的过程。
我们还计算了Scharr算法下的结果,它们之间的对比如下(从左到右分别为原图、Soble和Scharr):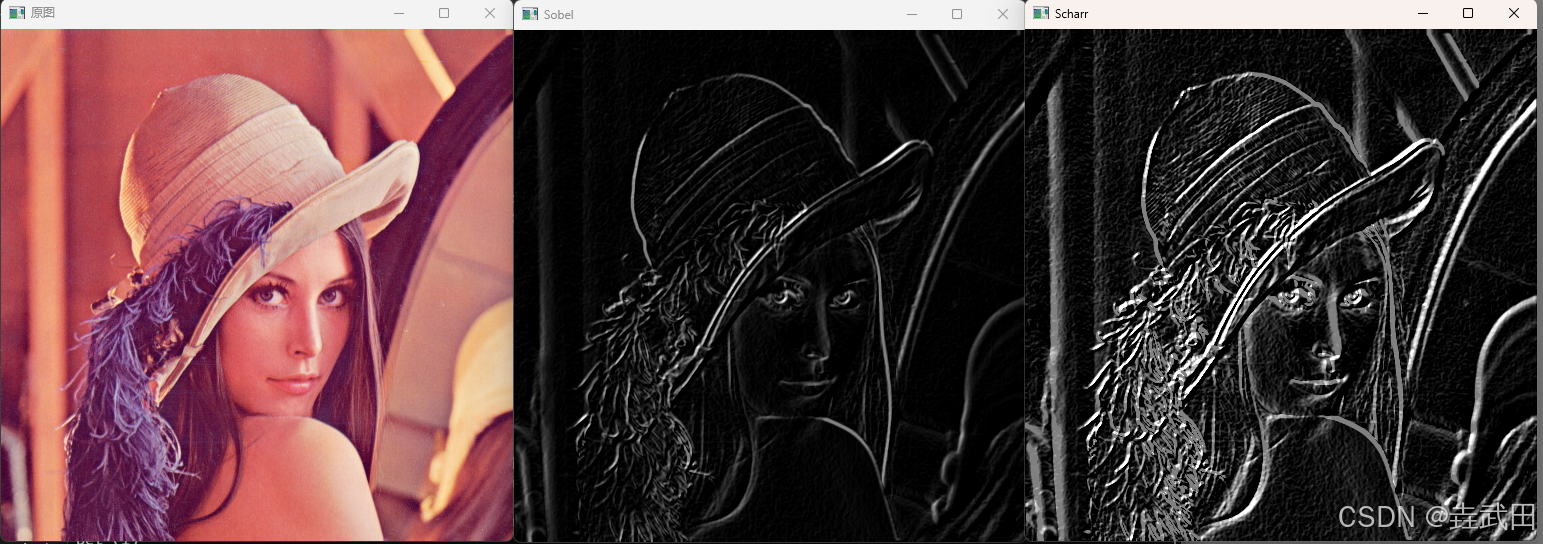
可以看到,在卷积核是 3 × 3 3 \times 3 3×3的情况下,Scharr算法得出的结果细节更丰富。
