
阅读量:0
一、前言
图像配准是一种图像处理技术,用于将多个场景对齐到单个集成图像中。在这篇文章中,我将讨论如何在可见光及其相应的热图像上应用图像配准。在继续该过程之前,让我们看看什么是热图像及其属性。
二、热红外数据介绍
热图像本质上通常是灰度图像:黑色物体是冷的,白色物体是热的,灰色的深度表示两者之间的差异。 然而,一些热像仪会为图像添加颜色,以帮助用户识别不同温度下的物体。

图1 左图为可见光;有图为热红外图像
上面两个图像是可见的,它是对应的热图像,你可以看到热图像有点被裁剪掉了。 这是因为在热图像中并没有捕获整个场景,而是将额外的细节作为元数据存储在热图像中。
因此,为了执行配准,我们要做的是找出可见图像的哪一部分出现在热图像中,然后对图像的该部分应用配准。

图2 .与热图像匹配后裁剪的可见图像
为了执行上述操作,基本上包含两张图像,一张参考图像和另一张要匹配的图像。 因此,下面的算法会找出参考图像的哪一部分出现在第二张图像中,并为您提供匹配图像部分的位置。
现在我们知道热图像中存在可见图像的哪一部分,我们可以裁剪可见图像,然后对生成的图像进行配准。
三、配准过程
为了执行配准,我们要做的是找出将像素从可见图像映射到热图像的特征点,这在本文中进行了解释,一旦我们获得了一定数量的像素,我们就会停止并开始映射这些像素,从而完成配准过程完成了。
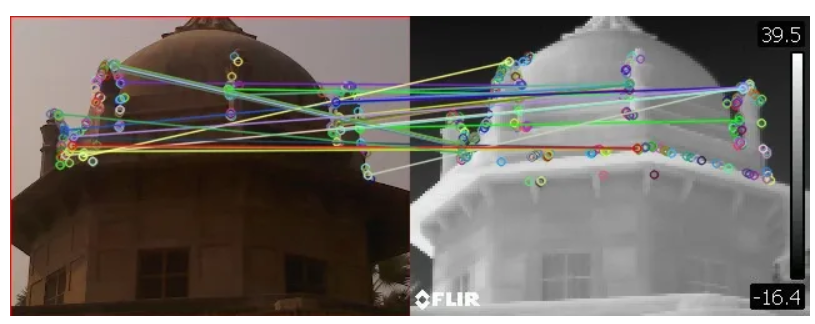
图3 热成像到可见光图像配准
一旦我们执行了配准,如果匹配正确,我们将获得具有配准图像的输出,如下图所示。

图4 最终输出结果
我对 400 张图像的数据集执行了此操作,获得的结果非常好。 错误数量很少,请参考下面的代码,看看一切是如何完成的。
from __future__ import print_function import numpy as np import argparse import glob import cv2 import os MAX_FEATURES = 500 GOOD_MATCH_PERCENT = 0.15 #function to align the thermal and visible image, it returns the homography matrix def alignImages(im1, im2,filename): # Convert images to grayscale im1Gray = cv2.cvtColor(im1, cv2.COLOR_BGR2GRAY) im2Gray = cv2.cvtColor(im2, cv2.COLOR_BGR2GRAY) # Detect ORB features and compute descriptors. orb = cv2.ORB_create(MAX_FEATURES) keypoints1, descriptors1 = orb.detectAndCompute(im1Gray, None) keypoints2, descriptors2 = orb.detectAndCompute(im2Gray, None) # Match features. matcher = cv2.DescriptorMatcher_create(cv2.DESCRIPTOR_MATCHER_BRUTEFORCE_HAMMING) matches = matcher.match(descriptors1, descriptors2, None) # Sort matches by score matches.sort(key=lambda x: x.distance, reverse=False) # Remove not so good matches numGoodMatches = int(len(matches) * GOOD_MATCH_PERCENT) matches = matches[:numGoodMatches] # Draw top matches imMatches = cv2.drawMatches(im1, keypoints1, im2, keypoints2, matches, None) if os.path.exists(os.path.join(args["output"],"registration")): pass else: os.mkdir(os.path.join(args["output"],"registration")) cv2.imwrite(os.path.join(args["output"],"registration",filename), imMatches) # Extract location of good matches points1 = np.zeros((len(matches), 2), dtype=np.float32) points2 = np.zeros((len(matches), 2), dtype=np.float32) for i, match in enumerate(matches): points1[i, :] = keypoints1[match.queryIdx].pt points2[i, :] = keypoints2[match.trainIdx].pt # Find homography h, mask = cv2.findHomography(points1, points2, cv2.RANSAC) # Use homography height, width, channels = im2.shape im1Reg = cv2.warpPerspective(im1, h, (width, height)) return im1Reg, h # construct the argument parser and parse the arguments # run the file with python registration.py --image filename ap = argparse.ArgumentParser() # ap.add_argument("-t", "--template", required=True, help="Path to template image") ap.add_argument("-i", "--image", required=False,default=r"热红外图像的路径", help="Path to images where thermal template will be matched") ap.add_argument("-v", "--visualize",required=False,default=r"真彩色影像的路径") ap.add_argument("-o", "--output",required=False,default=r"保存路径") args = vars(ap.parse_args()) # put the thermal image in a folder named thermal and the visible image in a folder named visible with the same name # load the image image, convert it to grayscale, and detect edges template = cv2.imread(args["image"]) template = cv2.cvtColor(template, cv2.COLOR_BGR2GRAY) template = cv2.Canny(template, 50, 200) (tH, tW) = template.shape[:2] cv2.imshow("Template", template) #cv2.waitKey(0) # loop over the images to find the template in # load the image, convert it to grayscale, and initialize the # bookkeeping variable to keep track of the matched region image = cv2.imread(args["visualize"]) gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) found = None # loop over the scales of the image for scale in np.linspace(0.2, 1.0, 20)[::-1]: # resize the image according to the scale, and keep track # of the ratio of the resizing resized = cv2.resize(gray, (int(gray.shape[1] * scale),int(gray.shape[0] * scale))) r = gray.shape[1] / float(resized.shape[1]) # if the resized image is smaller than the template, then break # from the loop if resized.shape[0] < tH or resized.shape[1] < tW: break # detect edges in the resized, grayscale image and apply template # matching to find the template in the image edged = cv2.Canny(resized, 50, 200) result = cv2.matchTemplate(edged, template, cv2.TM_CCOEFF) (_, maxVal, _, maxLoc) = cv2.minMaxLoc(result) # check to see if the iteration should be visualized if True: # draw a bounding box around the detected region clone = np.dstack([edged, edged, edged]) cv2.rectangle(clone, (maxLoc[0], maxLoc[1]), (maxLoc[0] + tW, maxLoc[1] + tH), (0, 0, 255), 2) cv2.imshow("Visualize", clone) #cv2.waitKey(0) # if we have found a new maximum correlation value, then update # the bookkeeping variable if found is None or maxVal > found[0]: found = (maxVal, maxLoc, r) # unpack the bookkeeping variable and compute the (x, y) coordinates # of the bounding box based on the resized ratio (_, maxLoc, r) = found (startX, startY) = (int(maxLoc[0] * r), int(maxLoc[1] * r)) (endX, endY) = (int((maxLoc[0] + tW) * r), int((maxLoc[1] + tH) * r)) # draw a bounding box around the detected result and display the image cv2.rectangle(image, (startX, startY), (endX, endY), (0, 0, 255), 2) crop_img = image[startY:endY, startX:endX] #cv2.imshow("Image", image) cv2.imshow("Crop Image", crop_img) #cv2.waitKey(0) #name = r"E:\temp\data5/thermal/"+args["image"]+'.JPG' thermal_image = cv2.imread(args["image"], cv2.IMREAD_COLOR) #cropping out the matched part of the thermal image crop_img = cv2.resize(crop_img, (thermal_image.shape[1], thermal_image.shape[0])) #cropped image will be saved in a folder named output if os.path.exists(os.path.join(args["output"],"process")): pass else: os.mkdir(os.path.join(args["output"],"process")) cv2.imwrite(os.path.join(args["output"],"process", os.path.basename(args["visualize"])),crop_img) #both images are concatenated and saved in a folder named results final = np.concatenate((crop_img, thermal_image), axis = 1) if os.path.exists(os.path.join(args["output"],"results")): pass else: os.mkdir(os.path.join(args["output"],"results")) cv2.imwrite(os.path.join(args["output"],"results", os.path.basename(args["visualize"])),final) #cv2.waitKey(0) # Registration # Read reference image refFilename = args["image"] print("Reading reference image : ", refFilename) imReference = cv2.imread(refFilename, cv2.IMREAD_COLOR) # Read image to be aligned imFilename = os.path.join(args["output"],"process", os.path.basename(args["visualize"])) print("Reading image to align : ", imFilename); im = cv2.imread(imFilename, cv2.IMREAD_COLOR) file_name=os.path.basename(args["image"])+'_registration.JPG' imReg, h = alignImages(im,imReference,file_name) cv2.imwrite(os.path.join(args["output"],"results", os.path.basename(args["image"])+'_result.JPG'),imReg) print("Estimated homography : \n", h)我们已经成功地进行了热到可见图像配准。你可以用你的数据集来尝试一下,然后看看结果。
后续:
因opencv版本问题做了修改,最终结果可以在registration和result保存路径下查看,其中opencv原因需要英文路径,调用使用方法如下:
python .\main.py -i “热红外影像路径” -v “真彩色影像路径” -o “保存路径”
