
阅读量:0
STM32G0B1 FDCAN调试深度详解
- 目录
- 1.FDCAN模块featurelist
- 2.初始化配置
- 1.CAN波特率配置
- 2.采样点配置
- 3.其他配置
- 3.过滤配置
- 1.不需要ID过滤,即全部接受
- 2.只接受某些ID
- 4.中断配置
- 5.数据发送
目录
1.FDCAN模块featurelist
STM32G0B1集成2路独立(相对STM32F10系列2路是非完全独立的)的CANFD模块
1.2个接收FIFO,每个FIFO有3级深度
2.1个发送FIFO,3级深度,可配置发送优先级
3.1个Tx Event FIFO(暂未研究应用场景)
4.2个中断线,可配置中断关联哪个中断线
5.强大且灵活的过滤器,标准帧有28个过滤器,扩展帧有8个过滤器
2.初始化配置
初始化可以基于cubmx进行配置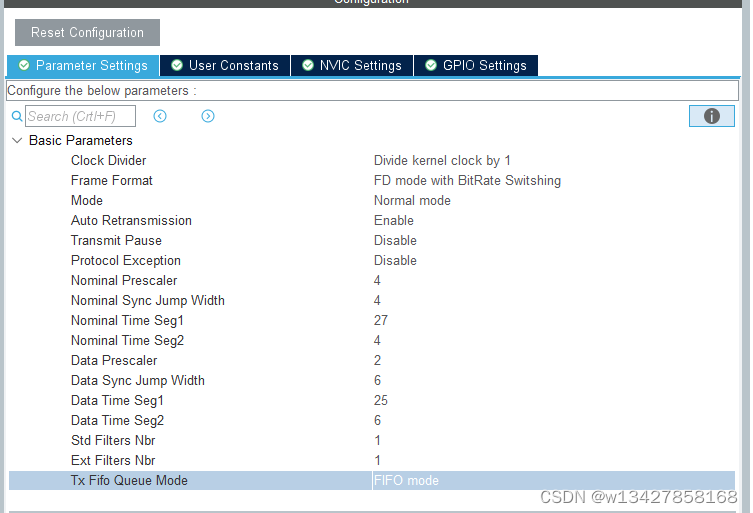
各个参数如下
uint32_t ClockDivider; /*!< Specifies the FDCAN kernel clock divider. The clock is common to all FDCAN instances. This parameter is applied only at initialisation of first FDCAN instance. This parameter can be a value of @ref FDCAN_clock_divider. */ uint32_t FrameFormat; /*!< Specifies the FDCAN frame format. This parameter can be a value of @ref FDCAN_frame_format */ uint32_t Mode; /*!< Specifies the FDCAN mode. This parameter can be a value of @ref FDCAN_operating_mode */ FunctionalState AutoRetransmission; /*!< Enable or disable the automatic retransmission mode. This parameter can be set to ENABLE or DISABLE */ FunctionalState TransmitPause; /*!< Enable or disable the Transmit Pause feature. This parameter can be set to ENABLE or DISABLE */ FunctionalState ProtocolException; /*!< Enable or disable the Protocol Exception Handling. This parameter can be set to ENABLE or DISABLE */ uint32_t NominalPrescaler; /*!< Specifies the value by which the oscillator frequency is divided for generating the nominal bit time quanta. This parameter must be a number between 1 and 512 */ uint32_t NominalSyncJumpWidth; /*!< Specifies the maximum number of time quanta the FDCAN hardware is allowed to lengthen or shorten a bit to perform resynchronization. This parameter must be a number between 1 and 128 */ uint32_t NominalTimeSeg1; /*!< Specifies the number of time quanta in Bit Segment 1. This parameter must be a number between 2 and 256 */ uint32_t NominalTimeSeg2; /*!< Specifies the number of time quanta in Bit Segment 2. This parameter must be a number between 2 and 128 */ uint32_t DataPrescaler; /*!< Specifies the value by which the oscillator frequency is divided for generating the data bit time quanta. This parameter must be a number between 1 and 32 */ uint32_t DataSyncJumpWidth; /*!< Specifies the maximum number of time quanta the FDCAN hardware is allowed to lengthen or shorten a data bit to perform resynchronization. This parameter must be a number between 1 and 16 */ uint32_t DataTimeSeg1; /*!< Specifies the number of time quanta in Data Bit Segment 1. This parameter must be a number between 1 and 32 */ uint32_t DataTimeSeg2; /*!< Specifies the number of time quanta in Data Bit Segment 2. This parameter must be a number between 1 and 16 */ uint32_t StdFiltersNbr; /*!< Specifies the number of standard Message ID filters. This parameter must be a number between 0 and 28 */ uint32_t ExtFiltersNbr; /*!< Specifies the number of extended Message ID filters. This parameter must be a number between 0 and 8 */ uint32_t TxFifoQueueMode; /*!< Tx FIFO/Queue Mode selection. This parameter can be a value of @ref FDCAN_txFifoQueue_Mode */ 这里重点讲以下几点:
1.CAN波特率配置
CAN的时钟源有三个,分别是PCLK,PLLQ,HSE,根据需要选择,假定选的是PCLK=64M,那么
仲裁域baud=64M/ClockDivider(only CAN1,CAN2固定为1) / NominalPrescaler / (1+NominalTimeSeg1+NominalTimeSeg2) = 64M/1/4/(1+27+4)=500K
数据域boud=64M/ClockDivider(only CAN1,CAN2固定为1)/DataPrescaler/(1+DataTimeSeg1+DataTimeSeg2) = 64M/1/2/(1+25+5)=1M其中以上几个参数有一下注意事项:
1)仲裁域波特率/数据域波特率 >= 1/8,比如仲裁域500K,数据域最多不超过4M
2)仲裁域和数据域的跳跃段SyncJumpWidth分别<=各自的TimeSeg2
2.采样点配置
仲裁域和数据域的采样点 = (1+Seg1)/(1+Seg1+Seg2),仲裁域和数据域的采样点可以不相同,但要遵循以下范围:
baud > 800K: 75%
baud > 500K:80%
baud <= 500K: 87.5%
3.其他配置
FrameFormat:配置传统can模式还是canfd模式,建议canfd,因为canfd兼容can模式(可以收发传统can报文)
AutoRetransmission:配置can发送时,未收到ack是否重复,一般配置重发
TransmitPause:配置是否允许发送暂停,一般不需要
ProtocolException:一般不需要
StdFiltersNbr:配置标准帧过滤器个数,最多28个,如果不用id过滤功能,不用关心。
ExtFiltersNbr:配置扩展帧过滤器个数,最多8个,如果不用id过滤功能,不用关心。
TxFifoQueueMode:配置发送模式,一般配置fifo就行了,即根据写入txfifo先后顺序发送报文。但有些应用场景需要后塞入发送fifo的报文,根据id或其他特性需要优先发送的场景,结合这个参数的配置可以满足
3.过滤配置
STM32G0的过滤器是我目前用过最好用的filter,主要有以下特点
1.标准帧和扩展帧的分别可以配置,包括使用过滤器的个数和每个过滤器的模式
2.支持[ID1,ID2]这种范围过滤
3.支持双过滤ID1,ID2满足任意即可(范围已经包含这种模式)
4.传统的filter,mask模式,即mask某位为1,则需要匹配对应的filter为;mask某位为0,则不用关心
5.通过过滤器的报文可以指定到进入那个FIFO,同时还支持相关优先级的配置,可以参考手册SFEC/EFEC位。
应用举例,
1.不需要ID过滤,即全部接受
不用配置过滤器,直接调用
HAL_StatusTypeDef HAL_FDCAN_ConfigGlobalFilter(FDCAN_HandleTypeDef *hfdcan, FDCAN_ACCEPT_IN_RX_FIFO0 ,FDCAN_ACCEPT_IN_RX_FIFO0 , FDCAN_FILTER_REMOTE, FDCAN_FILTER_REMOTE ) 允许接受所有的标准帧和扩展帧以及各自的远程帧即可
2.只接受某些ID
使用下面接口配置标准帧过滤,使用那个过滤器(如果StdFiltersNbr配置为3,那么可使用的过滤器分别是0,1,2)
HAL_StatusTypeDef HAL_FDCAN_ConfigFilter(FDCAN_HandleTypeDef *hfdcan, const FDCAN_FilterTypeDef *sFilterConfig) typedef struct { uint32_t IdType; //配置标准帧或扩展帧 uint32_t FilterIndex; //0~StdFiltersNbr-1或0~ExtFiltersNbr-1 uint32_t FilterType; //范围、双id、传统屏蔽方式 uint32_t FilterConfig; //通过过滤器不进或进入rxfifo0或rxfifo1及是否设置优先级 uint32_t FilterID1; /*!< Specifies the filter identification 1. This parameter must be a number between: - 0 and 0x7FF, if IdType is FDCAN_STANDARD_ID - 0 and 0x1FFFFFFF, if IdType is FDCAN_EXTENDED_ID */ uint32_t FilterID2; /*!< Specifies the filter identification 2. This parameter must be a number between: - 0 and 0x7FF, if IdType is FDCAN_STANDARD_ID - 0 and 0x1FFFFFFF, if IdType is FDCAN_EXTENDED_ID */ } FDCAN_FilterTypeDef; 如果需要设置多个规则,多次调用该接口,保证每次设置的FilterIndex不同(标准帧和扩展帧有各自的FilterIndex 0-27或0-7)
进行全局滤波器设置,设置标准和扩展的远程帧,设置标准和扩展的未通过滤波器的报文如何处理
HAL_StatusTypeDef HAL_FDCAN_ConfigGlobalFilter(FDCAN_HandleTypeDef *hfdcan, FDCAN_ACCEPT_IN_RX_FIFO0 ,FDCAN_ACCEPT_IN_RX_FIFO0 , FDCAN_FILTER_REMOTE, FDCAN_FILTER_REMOTE ) 比如设置某些id通过滤波器进入FIFO0,按照一般的设计,不通过滤波器的默认就被丢弃了,而STM32G0B1的FDCAN可以设置不通过滤波器的报文如何处理:拒绝或者进入FIFO0或FIFO1,这个机制对于某些应用设置ID白名单或黑名单或进行高级分组非常有效。
附RxFIFO及过滤器等位域定义
typedef struct{ union { uint32_t Raw; struct { union { uint32_t S0; struct { uint32_t SFID2:11; uint32_t :5; uint32_t SFID1:11; uint32_t SFEC :3; uint32_t SFT :2; } S0Bit; } S0; } Head; } StdFilter[28];//Standard Filter element union { uint32_t Raw[2]; struct { union { uint32_t F0; struct { uint32_t EFID1:29; uint32_t EFEC :3; } F0Bit; } F0; union { uint32_t F1; struct { uint32_t EFID2:29; uint32_t :1; uint32_t EFT :2; } F1Bit; } F1; } Head; } ExtFilter[8];//Extended Filter element union { uint32_t Raw[18];//占位 struct { union { uint32_t R0;//占位 struct { uint32_t :18; uint32_t ID :11;//Identifier uint32_t RTR:1;//Received frame is a remote frame uint32_t XTD:1;//Extended identifier uint32_t ESI:1;//Error state indicator } R0BitS; struct { uint32_t ID :29;//Identifier uint32_t RTR:1;//Received frame is a remote frame uint32_t XTD:1;//Extended identifier uint32_t ESI:1;//Error state indicator } R0BitE; } R0; union { uint32_t R1;//占位 struct { uint32_t RXTS:16;//Rx timestamp uint32_t DLC :4; uint32_t BRS :1;//Frame received with bit rate switching uint32_t FDF :1;//FDCAN frame format (new DLC-coding and CRC) uint32_t :2; uint32_t FIDX:7;//Filter index uint32_t ANMF:1;//Received frame did not match any Rx filter element } R1Bit; } R1; uint8_t Data[64]; } Head; } RxFifo[2][3];//RxFIFO0和1 union { uint32_t Raw[2]; struct { union { uint32_t E0; struct { uint32_t ID:29;//Identifier uint32_t RTR:1;//Received frame is a remote frame uint32_t XTD:1;//Extended identifier uint32_t ESI:1;//Error state indicator } E0Bit; } E0; union { uint32_t E1; struct { uint32_t TXTS:16; uint32_t DLC :4; uint32_t BRS :1; uint32_t EDF :1; uint32_t ET :2; uint32_t MM :8; } E1Bit; } E1; } Head; } TxEventFifo[3];//Tx Event FIFO union { uint32_t Raw[18];//占位 struct { union { uint32_t T0; struct { uint32_t ID:29;//Identifier uint32_t RTR:1;//Received frame is a remote frame uint32_t XTD:1;//Extended identifier uint32_t ESI:1;//Error state indicator } T0Bit; } T0; union { uint32_t T1; struct { uint32_t :16; uint32_t DLC:4; uint32_t BRS:1;//CAN FD frames transmitted with bit rate switching uint32_t FDF:1;//Frame transmitted in CAN FD format uint32_t :1; uint32_t EFC:1;//Store Tx events uint32_t MM:8;//Message marker } T1Bit; } T1; uint8_t Data[64]; } Head; } TxQueueFifo[3];//Tx FIFO/Queue } Stm32g_FdcanMbType; 如果想读rxfifo中的数据,使用该类型指针强行指向下面这个地址
#define SRAMCAN_BASE (APBPERIPH_BASE + 0x0000B400UL)
对于CAN2,加上sizeof(Stm32g_FdcanMbType)偏移即可,特别注意,m0不支持非对其访问,不可使用位域进行写操作!!!
4.中断配置
由于STM32G0B1是M0+内核,基于成本考虑,CAN1和CAN2的中断线0,CAN1和CAN2的的中断线1是同一个中断源
.word TIM16_FDCAN_IT0_IRQHandler /* TIM16 & FDCAN1_IT0 & FDCAN2_IT0 */ .word TIM17_FDCAN_IT1_IRQHandler /* TIM17 & FDCAN1_IT1 & FDCAN2_IT1 */ 如果同时使用CAN1和CAN2,建议CAN1使用中断线0,CAN2使中断线1,这样的好处是中断里不用判断到底是CAN1还是CAN2了,可以提升性能。注意,FIFO0&FIF01和IL0&IL1是无关的,不是FIFO0对应IL0的。
HAL_StatusTypeDef HAL_FDCAN_ConfigInterruptLines(FDCAN_HandleTypeDef *hfdcan, uint32_t ITList, uint32_t InterruptLine) 使能接收中断接口
HAL_StatusTypeDef HAL_FDCAN_ActivateNotification(FDCAN_HandleTypeDef *hfdcan, uint32_t ActiveITs, uint32_t BufferIndexes) 读取中断里接受的报文
HAL_StatusTypeDef HAL_FDCAN_GetRxMessage(FDCAN_HandleTypeDef *hfdcan, uint32_t RxLocation, FDCAN_RxHeaderTypeDef *pRxHeader, uint8_t *pRxData) 5.数据发送
HAL_StatusTypeDef HAL_FDCAN_AddMessageToTxFifoQ(FDCAN_HandleTypeDef *hfdcan, const FDCAN_TxHeaderTypeDef *pTxHeader, const uint8_t *pTxData) 当指定为传统can帧,可以发送标准帧、扩展帧及对应的远程帧,数据长度最多为8;
指定为canfd帧,可以设置标准帧、扩展帧,不可以发送远程帧,同时可以设置数据域波特率是否加速,数据长度分别为0~8,12,16,20,24,32,48,64(对应dlc为0-F)
