
阅读量:0
前言
由于项目制作时间有限,考虑到改变方案的风险,我们在遇到许多问题时并没有选择改变路线,而是在现有成果上缝缝补补,造就了现在看来十分笨重的通信模块,不过错误也是宝贵的学习经验,对于电子领域的工作者更是如此,因而笔者保留了我们制作时的失误和思考历程,供广大读者参考借鉴。
总体思路
一般FPGA不适合作为一个完整系统,因为FPGA更擅长流水处理,而不擅长控制,并且资源有限,像DDS信号发生器这种需要多个IP核的项目,on chip memory很容易写满。因而我们选择使用MCU作为控制端,一方面减轻FPGA负担,另一方面可以利用MCU的OLED外设提供用户交互界面。
FPGA需要从MCU接收10k到10M的载波信号频率,1k到5k调制信号频率,20到100调幅系数,10到20调频系数,五种波形选择,总计五个数据。分别对应24位、13位,8位,7位,3位二进制数。我们选用的UART配置为9600的波特率,一次发送一个起始位,八个数据位,一个终止位,无校验位。
我们在初步测试时,利用singal tap发现接收FPGA接收到许多杂乱无章的数据(后来发现时MCU发送端接错了管脚。。。),当时初步判断是噪声干扰,因而之后的绝大部分工作都花在了排除噪声上。当时已经写好的FPGA接收代码和MCU发送代码都没有加校验位,因而我们提出的排除噪声的方案是:FPGA添加一个FIFO模块用来暂时储存MCU发送过来的数据,MCU在用户输入了所需的所有数据后,将所有数据打包成十个八位码元连续不间断发送,这十个码元中只有中间八个是数据位(24位的载波信号频率需要三个八位码元发送,以此类推,五种数据共需要八个码元),前后两位都固定发送0xff,当且仅当FPGA接收到首尾都为0xff的数据时,才进行拆包,一点出现噪声,首尾的数据将不再是0xff,如此就有效避免了噪声的干扰。
FPGA接收部分
UART接收部分
Verilog代码
端口及变量定义
module uart1(clk,rst,uart_rx,r_rx_data,rx_done); input clk; input rst; input uart_rx;//输入信号 output reg rx_done;//接收完成标志 output reg [7:0]r_rx_data;//接收到的数据 parameter clk_fre = 50000000; parameter baud = 9600;//接受信号波特率 parameter MCNT_BAUD = clk_fre / baud - 1;//波特率计数最大值 reg [29:0]baud_div_cnt;//波特率计数 reg en_baud_cnt;//波特率计数使能 reg [3:0]bit_cnt;//位计数 reg [7:0]rx_data;//接收数据暂存 reg r_uart_rx;//最终接收数据 reg dff0_uart_rx; reg dff1_uart_rx;//打拍 wire negedge_uart_rx;//下降沿标志,用于检测数据起始位 wire w_rx_done;//接收完成标志波特率计数模块
always @(posedge clk) dff0_uart_rx <= uart_rx; always @(posedge clk) dff1_uart_rx <= dff0_uart_rx;//若在时钟上升沿附近uart_rx触发则会出现亚稳态问题,故进行两次同步,以将uart_rx同步到clk时钟域上,俗称打拍 always @(posedge clk) r_uart_rx <= dff1_uart_rx;//相当于一个D触发器,暂存当前状态 assign negedge_uart_rx = ((dff1_uart_rx == 0) && (r_uart_rx == 1));打拍及下降沿判断
always @(posedge clk or negedge rst)//波特率计数模块 if(!rst) baud_div_cnt <= 0; else if(en_baud_cnt) begin if(baud_div_cnt == MCNT_BAUD) baud_div_cnt <= 0; else baud_div_cnt <= baud_div_cnt + 1'd1; end else baud_div_cnt <= 0;波特率计数使能模块
always @(posedge clk or negedge rst) if(!rst) en_baud_cnt <= 0; else if(negedge_uart_rx) en_baud_cnt <= 1; else if((baud_div_cnt == MCNT_BAUD/2) && (bit_cnt == 0) && (dff1_uart_rx == 1))//如果是毛刺则停止计数 en_baud_cnt <= 0; else if((baud_div_cnt == MCNT_BAUD) && (bit_cnt == 9))//计数完成清零位计数模块
always @(posedge clk or negedge rst)//位计数器模块 if(!rst) bit_cnt <= 0; else if(baud_div_cnt == MCNT_BAUD) begin if(bit_cnt == 9) bit_cnt <= 0; else bit_cnt <= bit_cnt + 1'd1; end位接收模块
always @(posedge clk or negedge rst)//位接受逻辑 if(!rst) rx_data <= 8'd0; else if(baud_div_cnt == MCNT_BAUD/2) begin case(bit_cnt) 1:rx_data[0] <= dff1_uart_rx; 2:rx_data[1] <= dff1_uart_rx; 3:rx_data[2] <= dff1_uart_rx; 4:rx_data[3] <= dff1_uart_rx; 5:rx_data[4] <= dff1_uart_rx; 6:rx_data[5] <= dff1_uart_rx; 7:rx_data[6] <= dff1_uart_rx; 8:rx_data[7] <= dff1_uart_rx; //8:rx_data[8] <= dff1_uart_rx; default:rx_data<=rx_data; endcase end接收完成逻辑
assign w_rx_done = (baud_div_cnt == MCNT_BAUD) && (bit_cnt == 9); always @(posedge clk)//接受完成标志信号 rx_done <= w_rx_done; always @(posedge clk) if(w_rx_done) r_rx_data<=rx_data;串口仿真
用test bench写的,大概修改了一下
timescale 1 ns/ 1 ns module uart1_vlg_tst(); // constants // general purpose registers reg eachvec; // test vector input registers reg clk; reg rst; reg uart_rx; // wires wire [7:0] rx_data; wire rx_done; // assign statements (if any) uart1 i1 ( // port map - connection between master ports and signals/registers .clk(clk), .rst(rst), .rx_data(rx_data), .rx_done(rx_done), .uart_rx(uart_rx) ); initial clk = 1; always #10 clk = ~clk; initial begin clk = 1; rst = 0; uart_rx = 1; #201; rst = 1; #200; //8'b01010101 uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); #(5208*20*10); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); #(5208*20*10); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); #(5208*20*10); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); #(5208*20*10); uart_rx = 0; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 0; #(5208*20); uart_rx = 1; #(5208*20); uart_rx = 1; #(5208*20); #(5208*20*10); // code that executes only once // insert code here --> begin // --> end $display("Running testbench"); end /*always // optional sensitivity list // @(event1 or event2 or .... eventn) begin // code executes for every event on sensitivity list // insert code here --> begin @eachvec; // --> end end */ endmodule 仿真波形
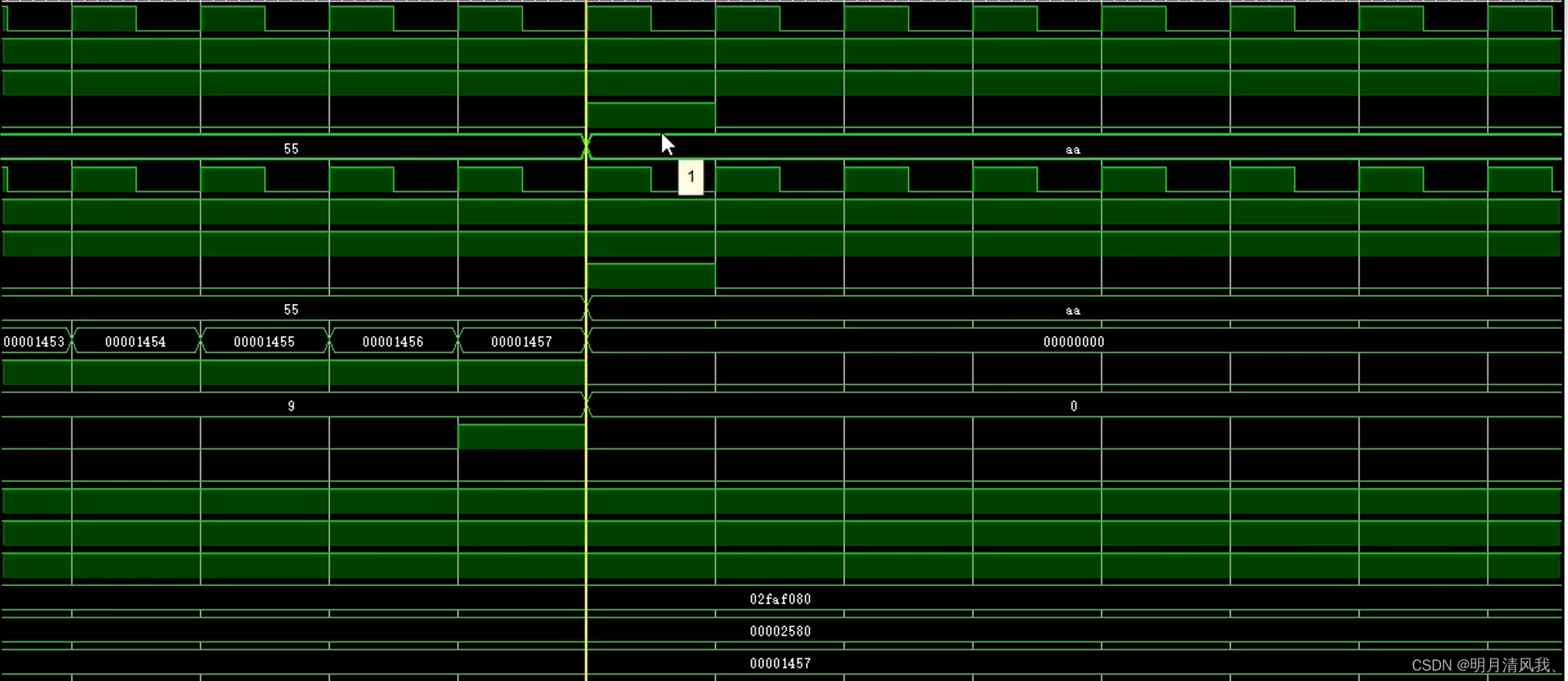
FIFO IP核
这篇文章中有非常详细的IP核配置教程,我们选用普通单时钟模式
端口定义以及变量使用
module decide ( input clk, input rst, input uart_tx, // 输入信号 input data_valid, output reg [23:0] car_wave_fre, // 10k-10M载波信号频率 output reg [12:0] mod_wave_fre, // 1k-5k调制信号频率 output reg [7:0] ma, // 20-100调幅系数 output reg [6:0] kf, // 10-50调频系数 output reg [2:0] wave_select // 信号选择 ); uart_rx uart_rx_inst ( .clk(clk), rst_n(rst), .TX(data), .RX(uart_rx), .done(data_valid), ); // FIFO实例化 wire rdreq, wrreq, empty, full; wire [7:0] q; wire [4:0] usedw; wire [7:0] data;//输入FPGA的数据 FIFO FIFO_normal_inst ( .clock(clk), .data(uart_tx), .rdreq(rdreq), //读使能 .wrreq(!empty && !full), // 写入使能 .empty(empty), //读空标志 .full(full), //写满标志 .q(q), .usedw(usedw) //当前存储了多少字符 ); reg [7:0] buffer[9:0]; // 用于储存数据 reg [1:0] index; // 用于追踪当前储存的数据在数组中的位置 reg packet_start; // 检测到0xff,开始 reg valid_packet;具体代码
always @(posedge clk or posedge rst) begin if (rst) begin index <= 0; packet_start <= 0; valid_packet <= 0; end else begin // 接收了十个数据时进行检测 if (index == 9) begin if (buffer[0] == 8'hff && buffer[9] == 8'hff) begin valid_packet <= 1; // Valid packet detected car_wave_fre <= {buffer[1],buffer[2],buffer[3]}; mod_wave_fre <= {buffer[4],buffer[5]}; ma <= buffer[6]; kf <= buffer[7]; wave_select <= buffer[8]; end else begin valid_packet <= 0; // 如果不满足规定的首位都为0xff的条件,停止传输 end index <= 0; packet_start <= 0; end else if (data_valid) begin if (!packet_start && uart_tx == 8'hff) begin packet_start <= 1; // 有效数据检测到 index <= 0; end if (packet_start) begin buffer[index] <= q; // 将数据存在数组中 index <= index + 1; // 当前数组位数 end end end end endmoduleMCU发送部分
本项目使用的是MSPM01306单片机
sysconfig配置
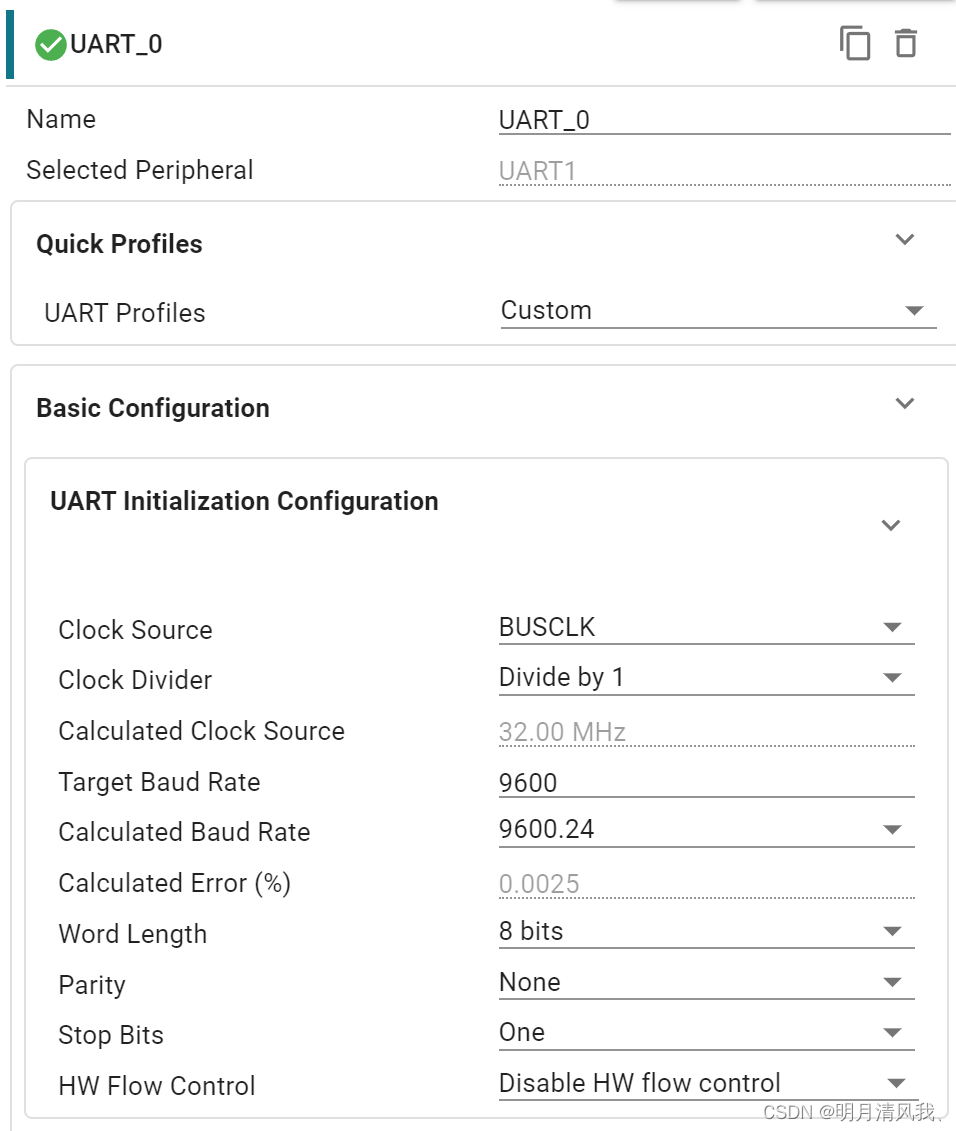
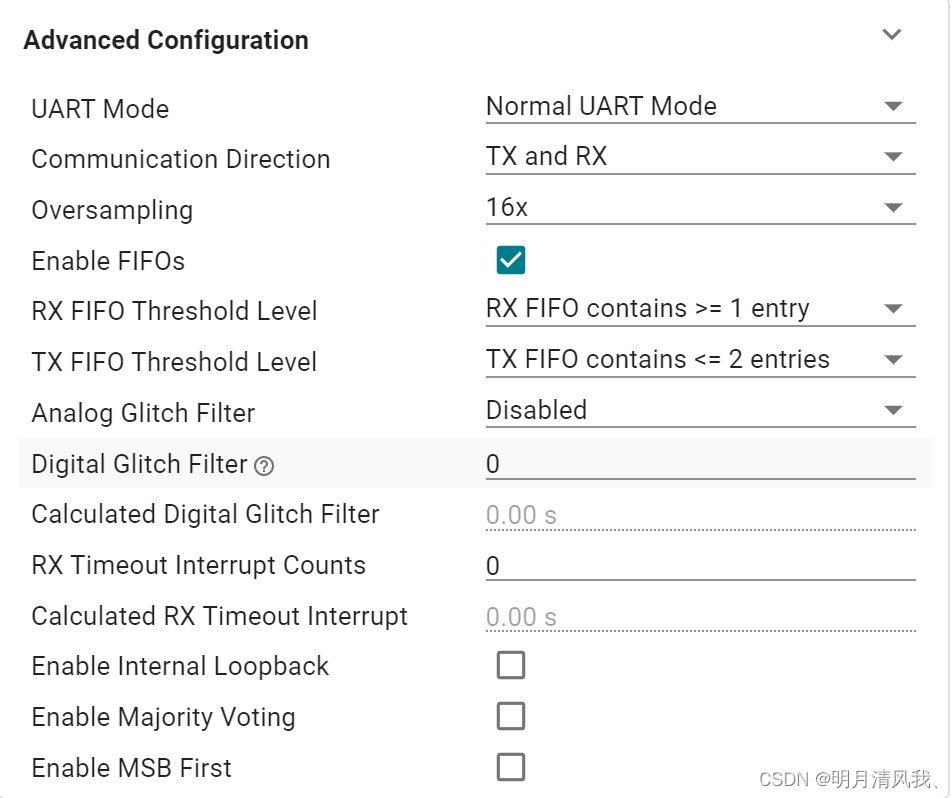
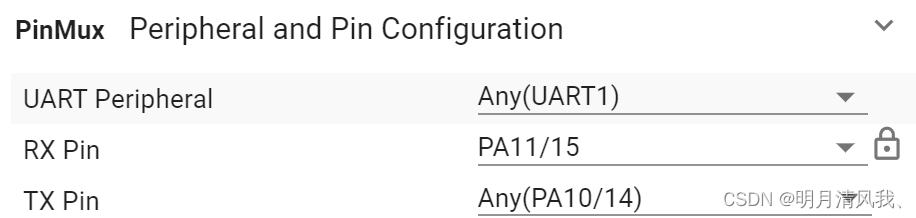
需要注意的一点,在Advanced Configuration中Oversampling选择16x保证传输精度,并且选择PA11,PA10这一组管脚
发送代码
由于主程序中涉及到OLED显示等库函数,非笔者所写,故在此仅分享发送函数和矩阵键盘函数
发送函数。值得注意的是,UART只能发送二进制数,故我们需要将用户输入的十进制数先转化为二进制数,并且将其分为若干段八位二进制数再进行发送,为了节省CPU资源(曾经我也认为MCU不需要节省CPU资源,直到有一次我在代码里写了指针,编译花了整整一分钟),我们使用逻辑右移运算符,并且与0xff进行位与运算,由此得到我们想要的八位数据
void transmit() { unsigned char byte1 = (csfre >> 16) & 0xFF; // 次高8位 unsigned char byte2 = (csfre >> 8) & 0xFF; // 次低8位 unsigned char byte3 = csfre & 0xFF; // 最低8位 unsigned char byte4 = (msfre >> 8) & 0xFF; // 次低8位 unsigned char byte5 = msfre & 0xFF; // 最低8位 unsigned char byte6 = ma & 0xFF; // 最低8位 unsigned char byte7 = kf & 0xFF; // 最低8位 unsigned char byte8 = wave_select & 0xFF; // 最低8位 DL_UART_Main_transmitData(UART1,0xff); delay(1); DL_UART_Main_transmitData(UART1,byte1); delay(1); DL_UART_Main_transmitData(UART1,byte2); delay(1); DL_UART_Main_transmitData(UART1,byte3); delay(1); DL_UART_Main_transmitData(UART1,byte4); delay(1); DL_UART_Main_transmitData(UART1,byte5); delay(1); DL_UART_Main_transmitData(UART1,byte6); delay(1); DL_UART_Main_transmitData(UART1,byte7); delay(1); DL_UART_Main_transmitData(UART1,byte8); delay(1); DL_UART_Main_transmitData(UART1,0xff); delay(1); }delay函数。时钟频率为32M
void delay(int x) { delay_cycles(CLK_HZ / 1000 * x); }矩阵键盘函数
uint32_t Key() { uint8_t a =15; static uint8_t flag = 0; if (flag) { delay(300); flag = 0; } DL_GPIO_clearPins(MAT_PORT, MAT_ROW1_PIN); DL_GPIO_setPins(MAT_PORT, MAT_ROW2_PIN |MAT_ROW3_PIN | MAT_ROW4_PIN); delay(10); if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL1_PIN))) { a = 1; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL2_PIN))) { a = 2; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL3_PIN))) { a = 3; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL4_PIN))) { a = 4; flag = 1; return a; } DL_GPIO_clearPins(MAT_PORT, MAT_ROW2_PIN); DL_GPIO_setPins(MAT_PORT, MAT_ROW1_PIN |MAT_ROW3_PIN | MAT_ROW4_PIN); delay(10); if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL1_PIN))) { a = 5; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL2_PIN))) { a = 6; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL3_PIN))) { a = 7; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL4_PIN))) { a = 8; flag = 1; return a; } // Row 4 DL_GPIO_clearPins(MAT_PORT, MAT_ROW3_PIN); DL_GPIO_setPins(MAT_PORT, MAT_ROW1_PIN |MAT_ROW2_PIN | MAT_ROW4_PIN); delay(10); if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL1_PIN))) { a = 9; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL2_PIN))) { a = 10; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL3_PIN))) { a = 11; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL4_PIN))) { a = 12; flag = 1; return a; } DL_GPIO_clearPins(MAT_PORT, MAT_ROW4_PIN); DL_GPIO_setPins(MAT_PORT, MAT_ROW1_PIN |MAT_ROW2_PIN | MAT_ROW3_PIN); delay(10); if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL1_PIN))) { a = 13; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL2_PIN))) { a = 14; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL3_PIN))) { a = 15; flag = 1; return a; } else if (!(DL_GPIO_readPins(MAT_PORT, MAT_COL4_PIN))) { a = 0; flag = 1; return a; } return a; }矩阵键盘sysconfig配置
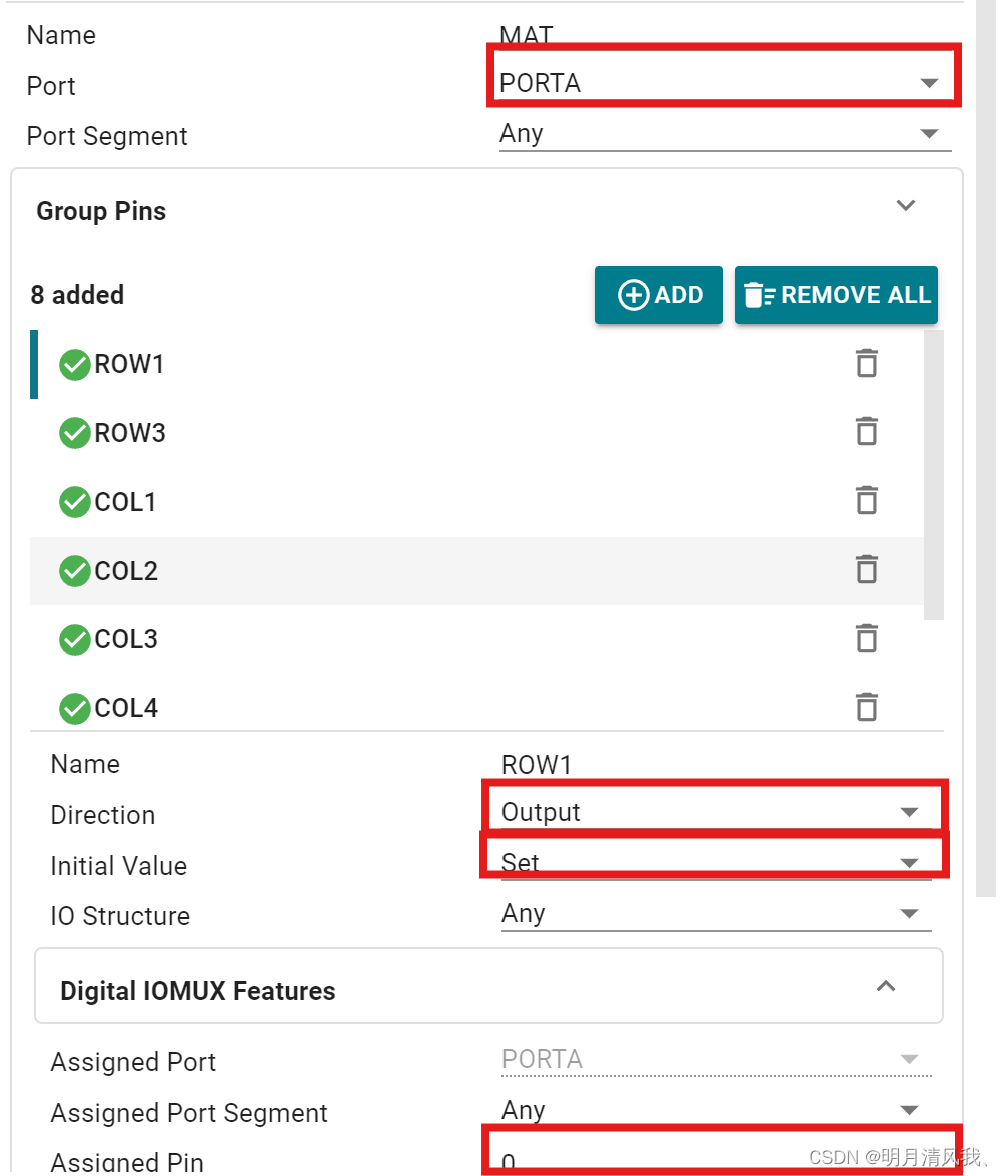
行设置,我们只需要将PORT设置为PORTA,Direction设为output,initial value设为set,并在Assigned Pin中配置相应管脚
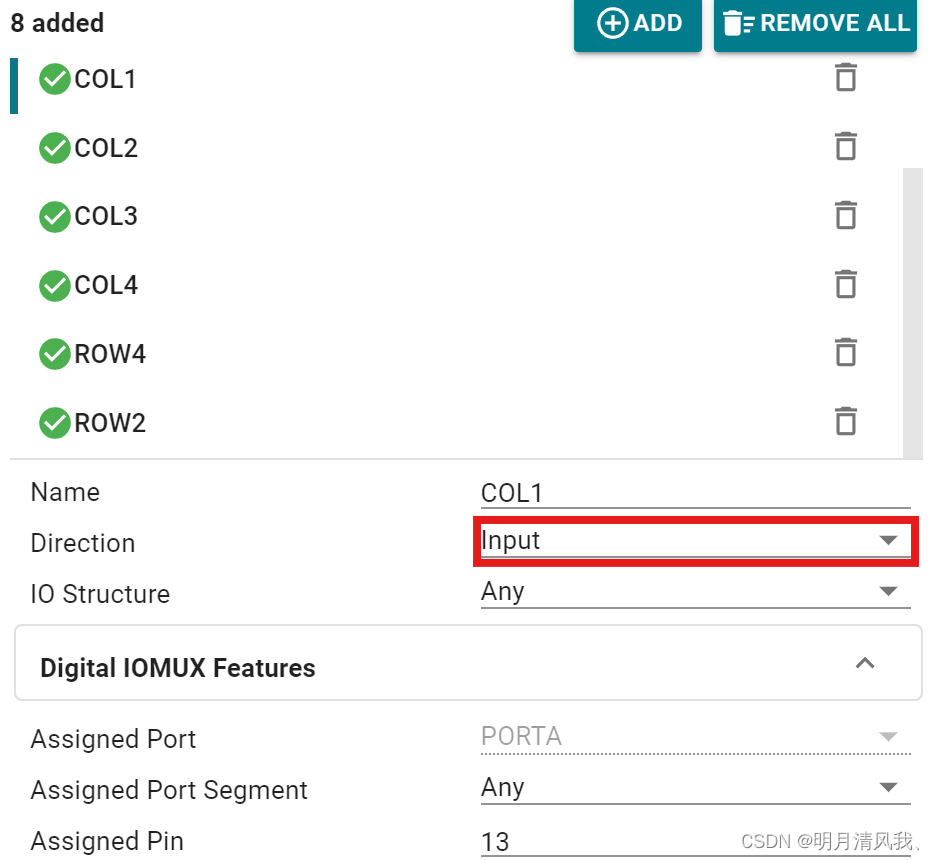
列设置,仅需要将Direction改为intput,并配置相应管脚
结语
现在看来,UART所使用的TTL电平已经可以有效的排除噪声的干扰,也就是说,将所有数据收集好后再进行发送是十分多余的,这使得用户想改变一种数据时都要重新输入所有数据。希望读者阅读完这篇文章后能够有所启发,设计出更为简单高效的通信系统
