
阅读量:0
基于单片机的智能寻迹小车设计
设计功能:
1.红外寻迹;
2.自动避障;
须知:
程序 仿真 原理图
ID:2830675723734912
永远有课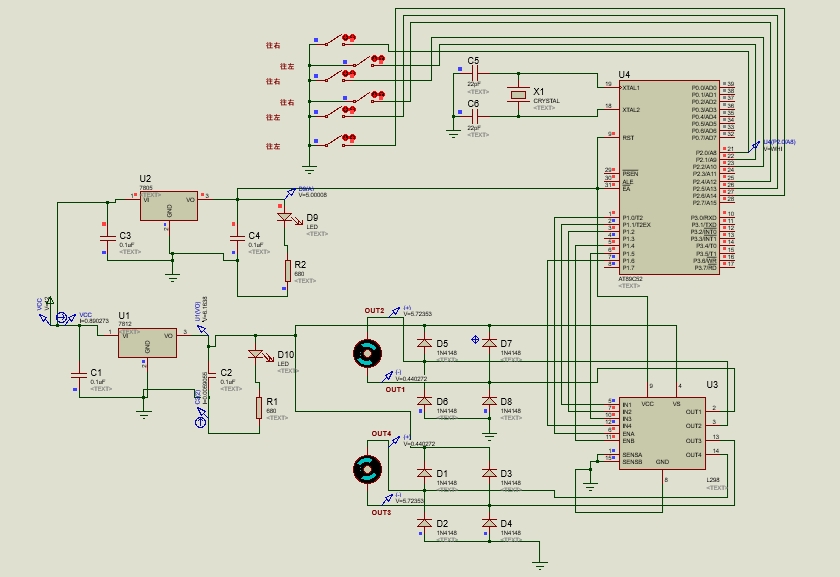
基于单片机的智能寻迹小车设计
随着技术的不断发展,智能控制系统在各个领域中得到了广泛的应用。其中,基于单片机的智能寻迹小车设计是一种非常有趣和有挑战性的项目。本文将围绕这个主题展开,介绍该设计的功能以及相关的程序仿真和原理图。
在设计之前,我们首先需要明确设计的功能。基于单片机的智能寻迹小车具备两个主要功能:红外寻迹和自动避障。下面将对这两个功能进行详细介绍。
红外寻迹
红外寻迹是智能寻迹小车的核心功能之一。通过使用红外线传感器,小车可以检测到地面上的黑线,并根据检测结果来控制方向。红外传感器通常通过发射红外线,然后通过接收器接收反射回来的光信号来判断是否检测到黑线。在设计过程中,我们需要考虑一些关键问题,例如红外传感器的布置和位置、检测算法的优化等等。自动避障
除了红外寻迹功能外,智能寻迹小车还需要具备自动避障的能力。这意味着在行进过程中,如果检测到障碍物,小车应该能够及时做出反应并避开障碍物。为了实现这一功能,我们可以使用超声波传感器或红外避障模块。这些传感器能够探测到前方的障碍物,并通过程序进行处理,使小车能够安全地绕过障碍物。
接下来,我们将介绍一些与程序、仿真和原理图相关的内容。在设计的过程中,我们需要编写相应的程序来控制小车的行为。这些程序可以使用C语言或者其他适合单片机的编程语言编写。针对红外寻迹功能,我们需要设计相应的算法来实现黑线的检测和控制方向的逻辑。而对于自动避障功能,我们需要编写一套完整的算法来实现障碍物的检测和避让。为了验证程序的正确性和可行性,在设计之前,可以使用仿真工具对程序进行模拟和测试。
此外,在进行实际的硬件设计之前,我们还需要绘制相应的原理图。原理图是对电路和连接的详细图解,它可以帮助我们更好地理解整个系统的工作原理。通过原理图,我们可以清晰地看到各个元件之间的连接方式以及电路的具体实现。因此,绘制准确的原理图非常重要,它是硬件设计的基础。
在实际的设计过程中,我们需要注意一些细节和技巧。例如,如何合理布置红外传感器和超声波传感器的位置,如何调整相关参数以提高系统的性能等。此外,为了保证系统的稳定性和可靠性,我们还需要考虑供电和线路的设计。
总之,基于单片机的智能寻迹小车设计是一个非常有趣的项目。通过实现红外寻迹和自动避障功能,我们可以让小车智能地在指定的轨迹上行驶,并能够自动识别和避开障碍物。通过程序仿真和原理图的设计,我们可以更好地理解系统的工作原理,并在实际制作中提高效率和准确性。希望本文对读者在设计智能寻迹小车时有所启发,并能够顺利完成自己的项目。
以上相关代码,程序地址:http://wekup.cn/675723734912.html
