
阅读量:0
1.什么是PWM?
脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,可以理解为控制脉冲的宽度,利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,它通过控制信号的脉冲宽度,实现对电压或电流的精确控制。在嵌入式的应用中,如数字信号控制的LED只有完全亮与灭两种状态,怎么能实现控制亮度大小呢?这就用到了PWM等效输出模拟量。
PWM的基本工作原理
在具有惯性的系统中,可以通过对一系列脉冲的宽度进行调制,来等效地获得所需要的模拟参量,常应用于电机控速等领域。
那么什么是惯性系统呢?如LED在熄灭的时候,由于余晖和人眼视觉暂留的现象,LED不会立马熄灭,而是有一定的惯性,过了一小段时间才熄灭的。具有惯性的系统才能使用PWM。
PWM目的:
使用PWM波形,等效地实现一个模拟信号的输出。
2.PWM的相关参数
PWM主要有三个参数:频率、占空比、分辨率
频率(Frequency):是指1秒钟内信号从高电平到低电平再回到高电平的次数(一个周期),也就是说一秒钟PWM有多少个周期。
占空比(Duty Cycle):是一个脉冲周期内,高电平的时间与整个周期时间的比例,占空比决定了PWM等效出来的模拟电压的大小,占空比越大,模拟电压越趋近于高电平。
分辨率(Resolution):就是占空比变化的快慢,占空比变化的细腻程度。占空比跳的快如按照1%跳变与按照0.1%跳变,那么0.1%的跳变就越细腻,越柔和。
参数介绍
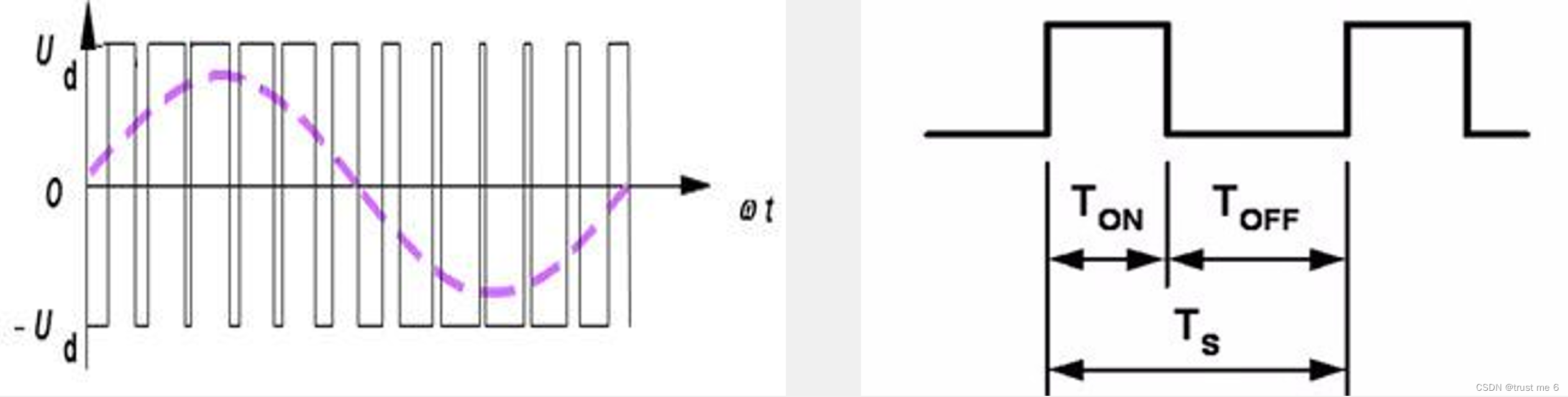
频率 = 1 / TS
占空比 = TON / TS
分辨率 = 占空比变化步距
注:TS:一个高低电平变换周期的时间。Ton:高电平占用的时间。
频率越快,等效地模拟信号就越平稳,不过性能开销越大。一般PWM的频率在几k到几十khz,这写频率就足够快了。
PWM的核心思想
比如利用PWM调节LED亮度,就是让LED不断地点亮、熄灭、点亮、熄灭...,当这个点亮熄灭的频率足够大时,LED就不会闪烁了,而是呈现出一个中等的亮度。调控点亮、熄灭的比例时,就能让LED呈现出不同的亮度级别。这也是PWM的基本思想。
3.定时器是怎么输出波形的?
定时器波形步骤
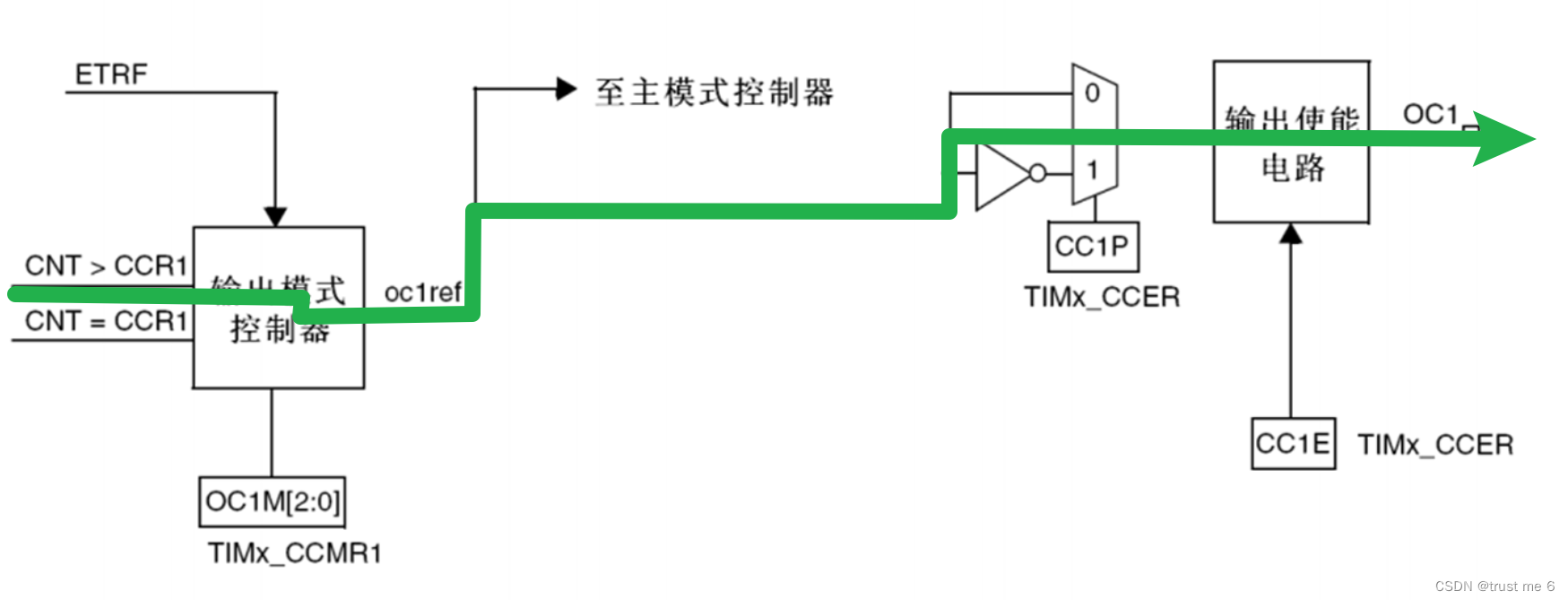
第一步:CNT(计数器)与CCR(捕获比较寄存器)进行比较,如果CNT大于or等于CCR,就会给输出模式控制器传一个信号;
第二步:输出模式控制器就会改变它输出OC1REF的高低电平,REF信号实际上就是信号的高低电平(REF:reference,参考信号);
第三步:CC1P:极性选择寄存器,给0,信号就会走对应的0那一路,信号不变;给1,信号会经过一个非门,极性翻转;
第四步:信号从OC1输出。
输出模式控制器
输出模式控制器:stm32有8种模式,可以通过寄存器配置,需要哪个模式,就配置哪个

4.PWM实现流程
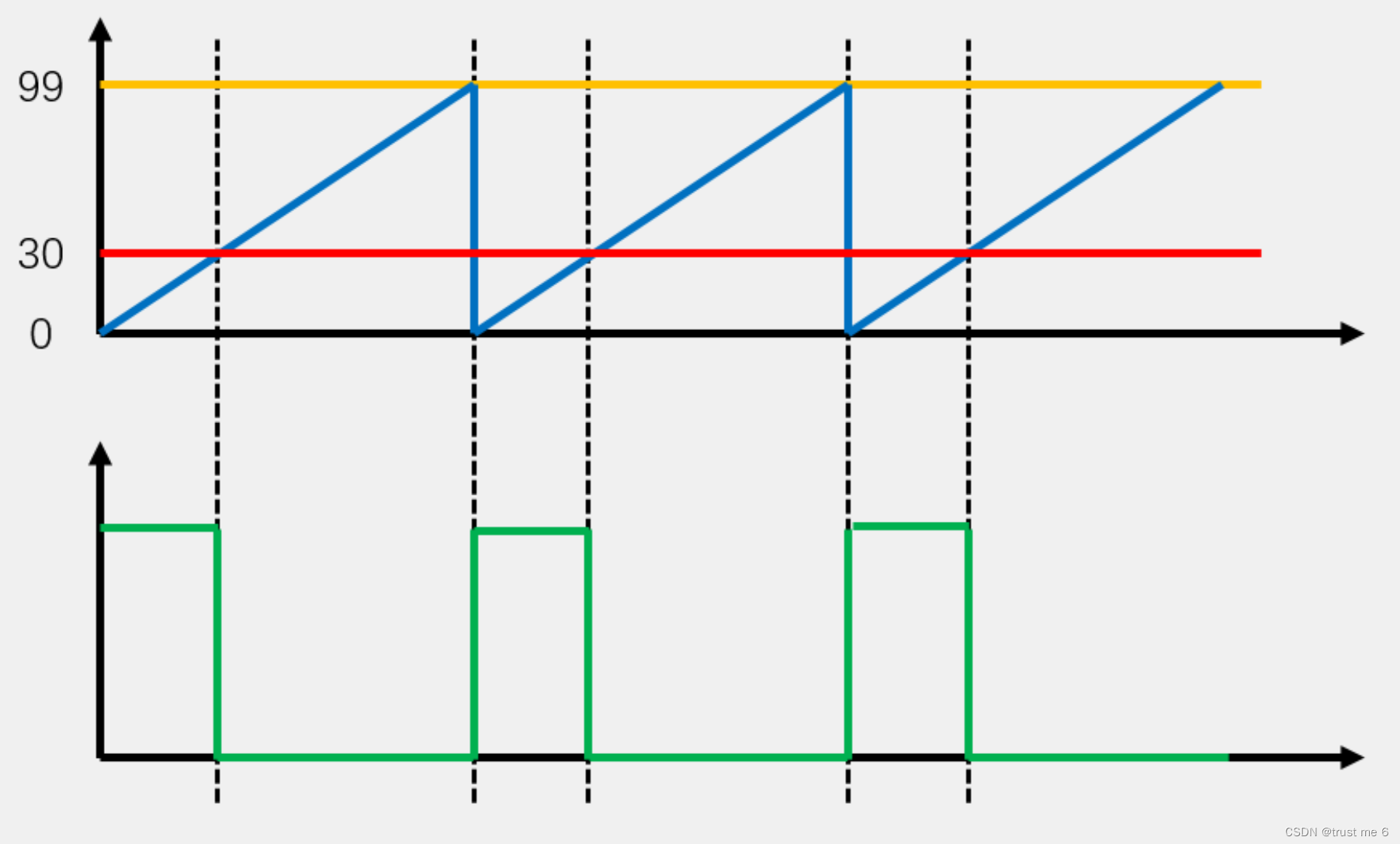 注:黄色线:计算器溢出频率(ARR),也是PWM更新频率;红色线:捕获比较寄存器(CCR)的值;蓝色线:计数器(CNT)的值。
注:黄色线:计算器溢出频率(ARR),也是PWM更新频率;红色线:捕获比较寄存器(CCR)的值;蓝色线:计数器(CNT)的值。
5.PWM的基本结构
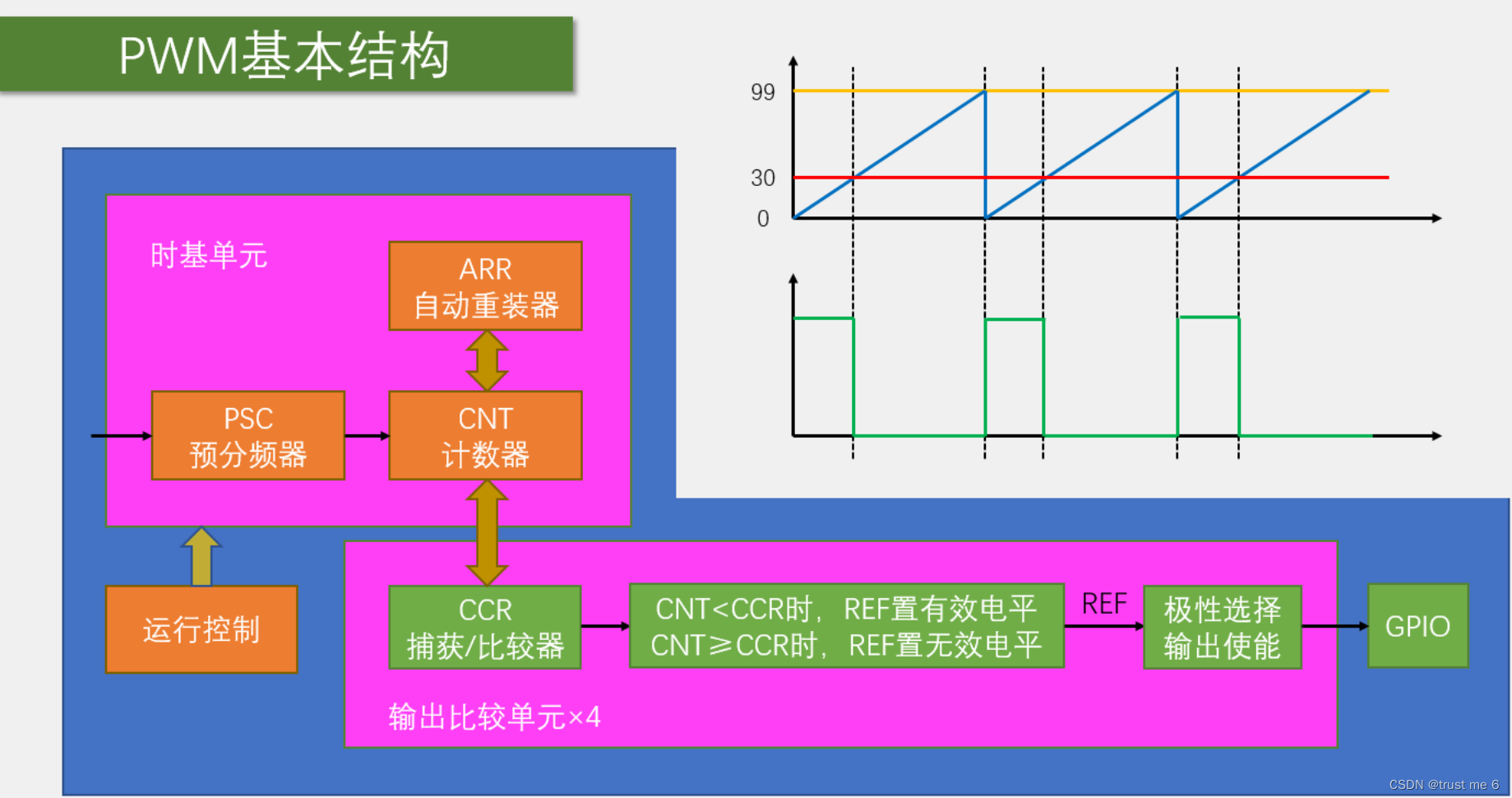 时基单元在上一篇定时器有详细介绍,这里主要介绍输出比较单元。定时器不断更新计数值,并且不断与捕获比较寄存器的值进行比较,当计数器的值大于等于捕获比较寄存器的值时,电平就会从高电平跳到低电平,当计数器的值小于捕获比较寄存器时,电平就会从低电平跳到高电平。
时基单元在上一篇定时器有详细介绍,这里主要介绍输出比较单元。定时器不断更新计数值,并且不断与捕获比较寄存器的值进行比较,当计数器的值大于等于捕获比较寄存器的值时,电平就会从高电平跳到低电平,当计数器的值小于捕获比较寄存器时,电平就会从低电平跳到高电平。
注:捕获比较寄存器的是我们根据自己的需求设置的。
6.PWM参数计算公式
PWM频率: Freq = CK_PSC / (PSC + 1) / (ARR + 1)
PWM占空比: Duty = CCR / (ARR + 1)
PWM分辨率: Reso = 1 / (ARR + 1)
Reso定义的分辨率是占空比最小的变化步距
注:
ARR:Automatic Reload Register,自动重装寄存器。计数到该值时,会重新计数,也就是重装的意思。
CCR:Catch Compare Register,捕获比较寄存器,CC捕获/比较意思,R是Register,寄存器的意思。两个共用,输入捕获寄存器。输出比较寄存器,比较CNT与CCR的值,CNT计数自增,CCR自己给定。当CNT大于CCR(小于或者等于)时,置1置0,然后输出应该电平不断跳变的PWM波形。
7.PWM驱动呼吸灯代码
一般人眼睛对于80Hz以上刷新频率则完全没有闪烁感,那么我们平时见到的LED灯,当它的频率大于50Hz的时候,人眼就会产生视觉暂留效果,基本就看不到闪烁了,而是误以为是一个常亮的LED灯。由于频率很高时看不到闪烁,占空比越大LED越亮,占空比越小LED越暗。所以,在频率一定时,可以用不同占空比改变LED灯的亮度,使其达到一个呼吸灯的效果。
#include "stm32f10x.h" // Device header void PWM_Init(void) { //本代码初始化的是TIM2的定时器 //1.开启时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //引脚重映射 GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE); //关闭调试功能 GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE); //初始化GPIO GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;//GPIO_Pin_15 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //2.选择时基单元的时钟源(是内部时钟还是外部时钟) TIM_InternalClockConfig(TIM2); //3.配置时基单元 //声明一个时基时钟的实参 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //配置分频,滤波时选择的频率 TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //计数器模式 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //ARR自动重装器的值,10KHz计10k个数,就是1s。 TIM_TimeBaseInitStructure.TIM_Period = 100-1;//ARR //PSC预分频器的值.72MHz/7200 = 10KHz TIM_TimeBaseInitStructure.TIM_Prescaler = 720-1;//PSC //重复计数器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //初始化比较单元 TIM_OCInitTypeDef TIM_OCInitStructure; //给结构体赋初始值 TIM_OCStructInit(&TIM_OCInitStructure); //设置输出比较的模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置输出比较的极性 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置输出使能 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //设置CCR的 TIM_OCInitStructure.TIM_Pulse = 0;//CRR TIM_OC1Init(TIM2,&TIM_OCInitStructure); //启动定时器 TIM_Cmd(TIM2,ENABLE); } //设置捕获比较寄存器的值 void PWM_SetCompare1(uint16_t Compare) { TIM_SetCompare1(TIM2,Compare); } 8.PWM驱动舵机
舵机的控制就是通过一个固定的频率,给其不同的占空比来控制舵机不同的转角。
舵机的频率一般为频率为50HZ,也就是一个20ms左右的时基脉冲,而脉冲的高电平部分一般为0.5ms-2.5ms范围,来控制舵机不同的转角。
500-2500us的PWM高电平部分对应控制180度舵机的0-180度。
以180度角为例,那么对应的控制如下:
0.5ms-------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
下图演示占空比从1ms变化到2ms时,转角的变化。
#include "stm32f10x.h" // Device header void PWM_Init(void) { //本代码初始化的是TIM2的定时器 //1.开启时钟 RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //引脚重映射 //GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2,ENABLE); //关闭调试功能 //GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE); //初始化GPIO GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;//GPIO_Pin_15 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); //2.选择时基单元的时钟源(是内部时钟还是外部时钟) TIM_InternalClockConfig(TIM2); //3.配置时基单元 //声明一个时基时钟的实参 TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //配置分频,滤波时选择的频率 TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //计数器模式 TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //ARR自动重装器的值,10KHz计10k个数,就是1s。 TIM_TimeBaseInitStructure.TIM_Period = 20000-1;//ARR //PSC预分频器的值.72MHz/7200 = 10KHz TIM_TimeBaseInitStructure.TIM_Prescaler = 72-1;//PSC //重复计数器的值 TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure); //初始化比较单元 TIM_OCInitTypeDef TIM_OCInitStructure; //给结构体赋初始值 TIM_OCStructInit(&TIM_OCInitStructure); //设置输出比较的模式 TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //设置输出比较的极性 TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //设置输出使能 TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //设置CCR的 TIM_OCInitStructure.TIM_Pulse = 0;//CRR TIM_OC2Init(TIM2,&TIM_OCInitStructure); //启动定时器 TIM_Cmd(TIM2,ENABLE); } void PWM_SetCompare2(uint16_t Compare) { TIM_SetCompare2(TIM2,Compare); } 