
阅读量:0
概述
SAM 是一种先进的人工智能模型,已经证明了在分割复杂和多样化图像方面具有优异的表现。该模型是计算机视觉和图像分割领域的一个重大突破。 SAM 的架构旨在处理各种图像分割任务,包括对象检测、实例分割和全景分割。这意味着该模型可以应用于各种用例,从医学图像分析到自主驾驶。
SAM 的独特之处之一是它具有执行全景分割的能力,这涉及将实例分割和语义分割相结合。实例分割涉及识别和划分图像内每个物体实例,而语义分割涉及为图像中的每个像素标记相应的类别标签。全景分割将这两种方法结合起来,以提供对图像更全面的理解。
SAM 的另一个关键特点是其灵活性。该模型可以针对特定的用例和领域进行微调,使其高度适应性。 SAM 的架构也非常高效,使其能够实时处理大量数据。这使其非常适合需要快速准确的图像分割的应用,例如安全监控、工业自动化和机器人技术。
SAM 如何运作:模型架构
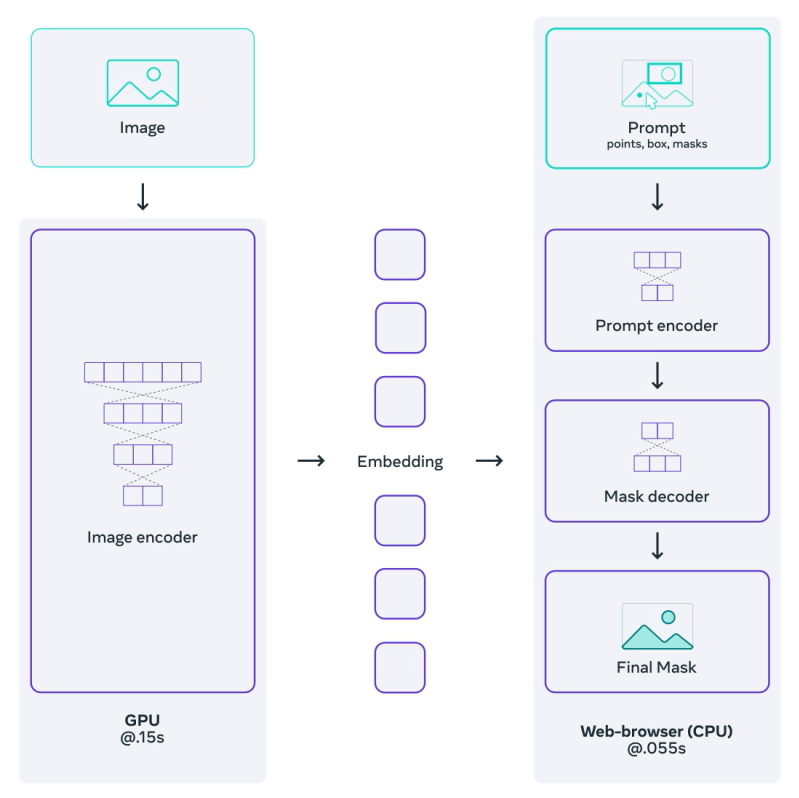
SAM(Segment Anything Model)是用于图像分割任务的先进深度学习模型。 SAM 使用卷积神经网络(CNN)和基于 Transformer 的架构结合在一起以分层和多尺度的方式处理图像。以下是 SAM 如何工作的高级概述:
- 骨干网络:SAM 使用预训练的 Vision Transformer,即 ViT 作为其骨干网络。骨干网络用于从输入图像中提取特征。
- 特征金字塔网络(FPN):SAM 使用特征金字塔网络(FPN)在多个尺度上生成特征映射。 FPN 是一系列卷积层,它们在不同尺度上运作,以从骨干网络的输出中提取特征。 FPN 确保 SAM 可以在不同细节层次上识别物体和边界。
- 解码器网络:SAM 使用解码器网络为输入图像生成分割掩模。解码器网络接受 FPN 的输出并将其上采样到原始图像大小。上采样过程使模型能够生成具有与输入图像相同分辨率的分割掩模。
- 基于 Transformer 的架构:SAM 还使用基于 Transformer 的架构来改进分割结果。 Transformer 是一种神经网络架构,非常有效地处理序列数据,例如文本或图像。使用基于 Transformer 的架构通过从输入图像中获取上下文信息来改进分割结果。
- 自监督学习:SAM 利用自监督学习从未标记的数据中学习。这涉及在大型未标记图像数据集上训练模型,以学习图像中的常见模式和特征。学习到的特征可以用于改善模型在特定图像分割任务上的性能。
- 全景分割:SAM 可以执行全景分割,这涉及结合实例和语义分割。实例分割涉及识别和划分图像内每个物体实例,而语义分割涉及为图像中的每个像素标记相应的类别标签。全景分割将这两种方法结合起来,以提供对图像更全面的理解。
SAM 的潜在用例
SAM(Segment Anything Model)是一种高度通用的图像分割模型,可应用于各种用例。以下是 SAM 的五个潜在用例:
- 自动驾驶车辆:SAM 可用于自动驾驶车辆中,以识别和分割环境中的不同物体,例如车辆、行人和路标。这些信息可用于帮助车辆做出有根据的导航和安全决策。
- 医学影像:SAM 可用于医学影像中,以分割图像中的不同结构和组织,例如肿瘤、血管和器官。这些信息可用于协助医生进行诊断和治疗计划。
- 对象检测:SAM 可用于识别和分割图像中的对象,用于对象检测任务。这可以在安全监控、工业自动化和机器人应用中很有用。
- 农业:SAM 可用于农业中,以监测作物的健康和生长情况。通过对田地或作物的不同区域进行分割,SAM 可以识别需要关注的区域,例如害虫侵害或营养不足的区域。
- 建筑工地监测:SAM 可用于监测建筑工地的进度,通过分割工地的不同组件,例如建筑物、设备和材料。这些信息可用于跟踪项目进度,确保项目按计划进行。
C++推理
ncnn
NCNN是一个为移动和嵌入式设备设计的高性能神经网络推理库,由腾讯的优图实验室(YouTu Lab)开发并开源。以下是对NCNN的简要概述:
目标:NCNN旨在提供快速、轻量级的深度学习模型部署方案,特别优化了在资源受限的设备上的性能。
性能优化:NCNN利用了多种硬件加速技术,包括NEON、Metal、OpenGL等,以实现在不同平台上的最优性能。
跨平台:支持跨平台使用,包括但不限于Android、iOS、Linux、Windows等操作系统。
模型支持:支持多种深度学习框架的模型转换,例如Caffe、TensorFlow等,方便开发者将不同来源的模型集成到NCNN中。
轻量化设计:NCNN的库文件体积小,适合移动设备和嵌入式设备,减少存储和内存占用。
灵活性:提供了灵活的输入输出接口,可以轻松地与现有的应用程序或系统进行集成。
易用性:NCNN提供了简洁的API,使得模型的加载、运行和推理过程简单明了。
硬件兼容性:针对不同的硬件平台进行了优化,包括CPU、GPU和DSP等,以充分利用各种硬件的计算能力。
社区支持:作为一个开源项目,NCNN拥有活跃的社区支持,不断有新的功能和优化被加入。
应用场景:适用于实时性要求高的场景,如视频流处理、图像识别、语音识别等。
NCNN的设计哲学是“小而美”,它专注于推理(inference)而非训练(training),并且特别注重在移动和嵌入式设备上的性能和效率。这使得NCNN成为在边缘设备上部署深度学习模型的理想选择。
C++ 推理
#include "pipeline.h" #include <iostream> namespace sam{ PipeLine::~PipeLine() { } int PipeLine::Init(const std::string& image_encoder_param, const std::string& image_encoder_bin, const std::string& mask_decoder_param, const std::string& mask_decoder_bin) { sam_ = std::make_shared<SegmentAnything>(); int ret = sam_->Load(image_encoder_param,image_encoder_bin,mask_decoder_param,mask_decoder_bin); return ret; } int PipeLine::ImageEmbedding(const cv::Mat& bgr, pipeline_result_t& pipeline_result) { std::cout << "start image encoder..." << std::endl; sam_->ImageEncoder(bgr, pipeline_result.image_embeddings, pipeline_result.image_info); std::cout << "finish image encoder..." << std::endl; return 0; } int PipeLine::AutoPredict(const cv::Mat& bgr, pipeline_result_t& pipeline_result, int n_per_side) { pipeline_result.prompt_info.prompt_type = PromptType::Point; //generate grid points std::vector<float> points_xy_vec; get_grid_points(points_xy_vec, n_per_side); std::vector<sam_result_t> proposals; for(int i = 0; i < n_per_side; ++i) { std::vector<sam_result_t> objects; for(int j = 0; j < n_per_side; ++j) { pipeline_result.prompt_info.points.clear(); pipeline_result.prompt_info.labels.clear(); pipeline_result.prompt_info.points.push_back(points_xy_vec[i * n_per_side * 2 + 2 * j] * pipeline_result.image_info.img_w); pipeline_result.prompt_info.points.push_back(points_xy_vec[i * n_per_side * 2 + 2 * j + 1] * pipeline_result.image_info.img_h); pipeline_result.prompt_info.points.push_back(0); pipeline_result.prompt_info.points.push_back(0); pipeline_result.prompt_info.labels.push_back(1); pipeline_result.prompt_info.labels.push_back(-1); sam_->MaskDecoder(pipeline_result.image_embeddings, pipeline_result.image_info, pipeline_result.prompt_info, objects); } proposals.insert(proposals.end(), objects.begin(), objects.end()); std::cout<<"processing: "<< i <<"/"<<n_per_side<<std::endl; } std::vector<int> picked; sam_->NMS(bgr, proposals, picked); int num_picked = picked.size(); for(int j = 0; j < num_picked; ++j){ pipeline_result.sam_result.push_back(proposals[picked[j]]); } return 0; } int PipeLine::Predict(const cv::Mat& bgr, pipeline_result_t& pipeline_result) { sam_->MaskDecoder(pipeline_result.image_embeddings, pipeline_result.image_info, pipeline_result.prompt_info, pipeline_result.sam_result); return 0; } void PipeLine::Draw(const cv::Mat& bgr, const pipeline_result_t& pipeline_result) { static const unsigned char colors[81][3] = { {56, 0, 255}, {226, 255, 0}, {0, 94, 255}, {0, 37, 255}, {0, 255, 94}, {255, 226, 0}, {0, 18, 255}, {255, 151, 0}, {170, 0, 255}, {0, 255, 56}, {255, 0, 75}, {0, 75, 255}, {0, 255, 169}, {255, 0, 207}, {75, 255, 0}, {207, 0, 255}, {37, 0, 255}, {0, 207, 255}, {94, 0, 255}, {0, 255, 113}, {255, 18, 0}, {255, 0, 56}, {18, 0, 255}, {0, 255, 226}, {170, 255, 0}, {255, 0, 245}, {151, 255, 0}, {132, 255, 0}, {75, 0, 255}, {151, 0, 255}, {0, 151, 255}, {132, 0, 255}, {0, 255, 245}, {255, 132, 0}, {226, 0, 255}, {255, 37, 0}, {207, 255, 0}, {0, 255, 207}, {94, 255, 0}, {0, 226, 255}, {56, 255, 0}, {255, 94, 0}, {255, 113, 0}, {0, 132, 255}, {255, 0, 132}, {255, 170, 0}, {255, 0, 188}, {113, 255, 0}, {245, 0, 255}, {113, 0, 255}, {255, 188, 0}, {0, 113, 255}, {255, 0, 0}, {0, 56, 255}, {255, 0, 113}, {0, 255, 188}, {255, 0, 94}, {255, 0, 18}, {18, 255, 0}, {0, 255, 132}, {0, 188, 255}, {0, 245, 255}, {0, 169, 255}, {37, 255, 0}, {255, 0, 151}, {188, 0, 255}, {0, 255, 37}, {0, 255, 0}, {255, 0, 170}, {255, 0, 37}, {255, 75, 0}, {0, 0, 255}, {255, 207, 0}, {255, 0, 226}, {255, 245, 0}, {188, 255, 0}, {0, 255, 18}, {0, 255, 75}, {0, 255, 151}, {255, 56, 0}, {245, 255, 0} }; cv::Mat img = bgr.clone(); for(size_t n = 0; n < pipeline_result.sam_result.size(); ++n) { for (int y = 0; y < img.rows; ++y) { uchar* image_ptr = img.ptr(y); const uchar* mask_ptr = pipeline_result.sam_result[n].mask.ptr<uchar>(y); for (int x = 0; x < img.cols; ++x) { if (mask_ptr[x] > 0) { image_ptr[0] = cv::saturate_cast<uchar>(image_ptr[0] * 0.5 + colors[n][0] * 0.5); image_ptr[1] = cv::saturate_cast<uchar>(image_ptr[1] * 0.5 + colors[n][1] * 0.5); image_ptr[2] = cv::saturate_cast<uchar>(image_ptr[2] * 0.5 + colors[n][2] * 0.5); } image_ptr += 3; } } //cv::rectangle(img, pipeline_result.sam_result[n].box, cv::Scalar(0,255,0), 2, 8,0); switch(pipeline_result.prompt_info.prompt_type) { case PromptType::Point: for(int i = 0; i < pipeline_result.prompt_info.points.size() / 2; ++i) { cv::circle(img, cv::Point(pipeline_result.prompt_info.points[2 * i], pipeline_result.prompt_info.points[2 * i + 1]), 5, cv::Scalar(255,255,0),2,8); } break; case PromptType::Box: cv::rectangle(img, cv::Rect(cv::Point(pipeline_result.prompt_info.points[0], pipeline_result.prompt_info.points[1]), cv::Point(pipeline_result.prompt_info.points[2], pipeline_result.prompt_info.points[3])), cv::Scalar(255,255,0),2,8); break; default: break; } } cv::imshow("dst", img); //cv::imshow("mask", pipeline_result.sam_result.mask); cv::imwrite("dst.jpg",img); cv::waitKey(); } void PipeLine::get_grid_points(std::vector<float>& points_xy_vec, int n_per_side) { float offset = 1.f / (2 * n_per_side); float start = offset; float end = 1 - offset; float step = (end - start) / (n_per_side - 1); std::vector<float> points_one_side; for (int i = 0; i < n_per_side; ++i) { points_one_side.push_back(start + i * step); } points_xy_vec.resize(n_per_side * n_per_side * 2); for (int i = 0; i < n_per_side; ++i) { for (int j = 0; j < n_per_side; ++j) { points_xy_vec[i * n_per_side * 2 + 2 * j + 0] = points_one_side[j]; points_xy_vec[i * n_per_side * 2 + 2 * j + 1] = points_one_side[i]; } } } } #include "segment_anything.h" namespace sam { SegmentAnything::~SegmentAnything() { image_encoder_net_.clear(); mask_decoder_net_.clear(); } static inline float intersection_area(const sam_result_t& a, const sam_result_t& b) { cv::Rect_<float> inter = a.box & b.box; return inter.area(); } static void qsort_descent_inplace(std::vector<sam_result_t>& faceobjects, int left, int right) { int i = left; int j = right; float p = faceobjects[(left + right) / 2].iou_pred; while (i <= j) { while (faceobjects[i].iou_pred > p) i++; while (faceobjects[j].iou_pred < p) j--; if (i <= j) { // swap std::swap(faceobjects[i], faceobjects[j]); i++; j--; } } #pragma omp parallel sections { #pragma omp section { if (left < j) qsort_descent_inplace(faceobjects, left, j); } #pragma omp section { if (i < right) qsort_descent_inplace(faceobjects, i, right); } } } static void qsort_descent_inplace(std::vector<sam_result_t>& faceobjects) { if (faceobjects.empty()) return; qsort_descent_inplace(faceobjects, 0, faceobjects.size() - 1); } static void nms_sorted_bboxes(const cv::Mat& bgr,const std::vector<sam_result_t>& faceobjects, std::vector<int>& picked, float nms_threshold) { picked.clear(); const int n = faceobjects.size(); std::vector<float> areas(n); for (int i = 0; i < n; i++) { areas[i] = faceobjects[i].box.area(); } cv::Mat img = bgr.clone(); for (int i = 0; i < n; i++) { const sam_result_t& a = faceobjects[i]; int keep = 1; for (int j = 0; j < (int)picked.size(); j++) { const sam_result_t& b = faceobjects[picked[j]]; // intersection over union float inter_area = intersection_area(a, b); float union_area = areas[i] + areas[picked[j]] - inter_area; // float IoU = inter_area / union_area if (inter_area / union_area > nms_threshold){ keep = 0; } } if (keep) picked.push_back(i); } } int SegmentAnything::NMS(const cv::Mat& bgr, std::vector<sam_result_t>& proposals, std::vector<int>& picked, float nms_threshold) { qsort_descent_inplace(proposals); nms_sorted_bboxes(bgr, proposals, picked, nms_threshold); return 0; } int SegmentAnything::Load(const std::string& image_encoder_param, const std::string& image_encoder_bin, const std::string& mask_decoder_param, const std::string& mask_decoder_bin) { int ret = 0; ret = image_encoder_net_.load_param(image_encoder_param.c_str()); if (ret < 0) return -1; ret = image_encoder_net_.load_model(image_encoder_bin.c_str()); if (ret < 0) return -1; ret = mask_decoder_net_.load_param(mask_decoder_param.c_str()); if (ret < 0) return -1; ret = mask_decoder_net_.load_model(mask_decoder_bin.c_str()); if (ret < 0) return -1; return 0; } int SegmentAnything::ImageEncoder(const cv::Mat& bgr, ncnn::Mat& image_embeddings, image_info_t& image_info) { const int target_size = 1024; int img_w = bgr.cols; int img_h = bgr.rows; int w = img_w; int h = img_h; float scale = 1.f; if (w > h) { scale = (float)target_size / w; w = target_size; h = h * scale; } else { scale = (float)target_size / h; h = target_size; w = w * scale; } ncnn::Mat in = ncnn::Mat::from_pixels_resize(bgr.data, ncnn::Mat::PIXEL_BGR2RGB, img_w, img_h, w, h); int wpad = target_size - w; int hpad = target_size - h; ncnn::Mat in_pad; ncnn::copy_make_border(in, in_pad, 0, hpad, 0, wpad, ncnn::BORDER_CONSTANT, 0.f); in_pad.substract_mean_normalize(means_, norms_); ncnn::Extractor image_encoder_ex = image_encoder_net_.create_extractor(); image_encoder_ex.input("image", in_pad); image_encoder_ex.extract("image_embeddings", image_embeddings); image_info.img_h = img_h; image_info.img_w = img_w; image_info.pad_h = h; image_info.pad_w = w; image_info.scale = scale; return 0; } int SegmentAnything::embed_masks(const prompt_info_t& prompt_info, ncnn::Mat& mask_input, ncnn::Mat& has_mask) { mask_input = ncnn::Mat(256, 256, 1); mask_input.fill(0.f); has_mask = ncnn::Mat(1); has_mask.fill(0.f); return 0; } int SegmentAnything::transform_coords(const image_info_t& image_info, ncnn::Mat& point_coords) { for(int h = 0; h < point_coords.h; ++h){ float* ptr = point_coords.row(h); ptr[0] *= image_info.scale; ptr[1] *= image_info.scale; } return 0; } int SegmentAnything::embed_points(const prompt_info_t& prompt_info, std::vector<ncnn::Mat>& point_labels, ncnn::Mat& point_coords) { int num_points = prompt_info.points.size() / 2; point_coords = ncnn::Mat(num_points * 2, (void*)prompt_info.points.data()).reshape(2, num_points).clone(); ncnn::Mat point_labels1 = ncnn::Mat(256, num_points); ncnn::Mat point_labels2 = ncnn::Mat(256, num_points); ncnn::Mat point_labels3 = ncnn::Mat(256, num_points); ncnn::Mat point_labels4 = ncnn::Mat(256, num_points); ncnn::Mat point_labels5 = ncnn::Mat(256, num_points); ncnn::Mat point_labels6 = ncnn::Mat(256, num_points); point_labels1.row_range(0, num_points - 1).fill(1.f); point_labels1.row_range(num_points - 1, 1).fill(0.f); for (int i = 0; i < num_points - 1; ++i) { if (prompt_info.labels[i] == -1) point_labels2.row_range(i, 1).fill(1.f); else point_labels2.row_range(i, 1).fill(0.f); } point_labels2.row_range(num_points - 1, 1).fill(1.f); for (int i = 0; i < num_points - 1; ++i) { if (prompt_info.labels[i] == 0) point_labels3.row_range(i, 1).fill(1.f); else point_labels3.row_range(i, 1).fill(0.f); } point_labels3.row_range(num_points - 1, 1).fill(0.f); for (int i = 0; i < num_points - 1; ++i) { if (prompt_info.labels[i] == 1) point_labels4.row_range(i, 1).fill(1.f); else point_labels4.row_range(i, 1).fill(0.f); } point_labels4.row_range(num_points - 1, 1).fill(0.f); for (int i = 0; i < num_points - 1; ++i) { if (prompt_info.labels[i] == 2) point_labels5.row_range(i, 1).fill(1.f); else point_labels5.row_range(i, 1).fill(0.f); } point_labels5.row_range(num_points - 1, 1).fill(0.f); for (int i = 0; i < num_points - 1; ++i) { if (prompt_info.labels[i] == 3) point_labels6.row_range(i, 1).fill(1.f); else point_labels6.row_range(i, 1).fill(0.f); } point_labels6.row_range(num_points - 1, 1).fill(0.f); point_labels.push_back(point_labels1); point_labels.push_back(point_labels2); point_labels.push_back(point_labels3); point_labels.push_back(point_labels4); point_labels.push_back(point_labels5); point_labels.push_back(point_labels6); return 0; } int SegmentAnything::MaskDecoder(const ncnn::Mat& image_embeddings, image_info_t& image_info, const prompt_info_t& prompt_info, std::vector<sam_result_t>& sam_results, float pred_iou_thresh, float stability_score_thresh) { std::vector<ncnn::Mat> point_labels; ncnn::Mat point_coords; embed_points(prompt_info, point_labels, point_coords); transform_coords(image_info, point_coords); ncnn::Mat mask_input, has_mask; embed_masks(prompt_info, mask_input, has_mask); ncnn::Extractor mask_decoder_ex = mask_decoder_net_.create_extractor(); mask_decoder_ex.input("mask_input", mask_input); mask_decoder_ex.input("point_coords", point_coords); mask_decoder_ex.input("point_labels1", point_labels[0]); mask_decoder_ex.input("point_labels2", point_labels[1]); mask_decoder_ex.input("point_labels3", point_labels[2]); mask_decoder_ex.input("point_labels4", point_labels[3]); mask_decoder_ex.input("point_labels5", point_labels[4]); mask_decoder_ex.input("point_labels6", point_labels[5]); mask_decoder_ex.input("image_embeddings", image_embeddings); mask_decoder_ex.input("has_mask_input", has_mask); ncnn::Mat scores; mask_decoder_ex.extract("scores", scores); ncnn::Mat masks; mask_decoder_ex.extract("masks", masks); //postprocess std::vector<std::pair<float, int>> scores_vec; for (int i = 1; i < scores.w; ++i) { scores_vec.push_back(std::pair<float, int>(scores[i], i)); } std::sort(scores_vec.begin(), scores_vec.end(), std::greater<std::pair<float, int>>()); if (scores_vec[0].first > pred_iou_thresh) { sam_result_t sam_result; ncnn::Mat mask = masks.channel(scores_vec[0].second); cv::Mat cv_mask_32f = cv::Mat::zeros(cv::Size(mask.w, mask.h), CV_32F); std::copy((float*)mask.data, (float*)mask.data + mask.w * mask.h, (float*)cv_mask_32f.data); cv::Mat single_mask_32f; cv::resize(cv_mask_32f(cv::Rect(0, 0, image_info.pad_w, image_info.pad_h)), single_mask_32f, cv::Size(image_info.img_w,image_info.img_h), 0, 0, 1); float stable_score = calculate_stability_score(single_mask_32f); if (stable_score < stability_score_thresh) return -1; single_mask_32f = single_mask_32f > 0; single_mask_32f.convertTo(sam_result.mask, CV_8UC1, 1, 0); if (postprocess_mask(sam_result.mask, sam_result.box) < 0) return -1; sam_results.push_back(sam_result); } else { return -1; } return 0; } int SegmentAnything::postprocess_mask(cv::Mat& mask, cv::Rect& box) { std::vector<std::vector<cv::Point>> contours; std::vector<cv::Vec4i> hierarchy; cv::findContours(mask.clone(), contours, hierarchy, cv::RETR_EXTERNAL, cv::CHAIN_APPROX_SIMPLE); if(contours.size() == 0) return -1; if (contours.size() > 1) { float max_area = 0; int max_idx = 0; std::vector<std::pair<float,int>> areas; for (size_t i = 0; i < contours.size(); ++i) { float area = cv::contourArea(contours[i]); if (area > max_area) { max_idx = i; max_area = area; } areas.push_back(std::pair<float,int>(area,i)); } for (size_t i = 0; i < areas.size(); ++i) { //if (i == max_idx) // continue; //else { // cv::drawContours(mask, contours, i, cv::Scalar(0), -1); //} if(areas[i].first < max_area * 0.3){ cv::drawContours(mask, contours, i, cv::Scalar(0), -1); } else{ box = box | cv::boundingRect(contours[i]); } } } else { box = cv::boundingRect(contours[0]); } return 0; } float SegmentAnything::calculate_stability_score(cv::Mat& mask, float mask_threshold, float stable_score_offset) { float intersections = (float)cv::countNonZero(mask > (mask_threshold + stable_score_offset)); float unions = (float)cv::countNonZero(mask > (mask_threshold - stable_score_offset)); return intersections / unions; } } 调用模型
#include "pipeline.h" #include <iostream> int main() { int type = 1; cv::Mat bgr = cv::imread("2.jpg"); std::shared_ptr<sam::PipeLine> pipe(new sam::PipeLine()); pipe->Init("models/encoder-matmul.param","models/encoder-matmul.bin", "models/decoder.param", "models/decoder.bin"); pipeline_result_t pipe_result; pipe->ImageEmbedding(bgr, pipe_result); switch (type) { case 1://automatic mask pipe_result.sam_result.clear(); pipe_result.prompt_info.points.clear(); pipe_result.prompt_info.labels.clear(); pipe->AutoPredict(bgr, pipe_result); pipe->Draw(bgr, pipe_result); break; case 2://prompt input: points pipe_result.prompt_info.prompt_type = PromptType::Point; pipe_result.prompt_info.points.push_back(497); pipe_result.prompt_info.points.push_back(220); pipe_result.prompt_info.points.push_back(455); pipe_result.prompt_info.points.push_back(294); pipe_result.prompt_info.points.push_back(0); pipe_result.prompt_info.points.push_back(0); pipe_result.prompt_info.labels.push_back(1); pipe_result.prompt_info.labels.push_back(1); pipe_result.prompt_info.labels.push_back(-1); pipe->Predict(bgr, pipe_result); pipe->Draw(bgr, pipe_result); break; case 3://prompt input: box pipe_result.prompt_info.prompt_type = PromptType::Box; pipe_result.prompt_info.points.push_back(344); pipe_result.prompt_info.points.push_back(144); pipe_result.prompt_info.points.push_back(607); pipe_result.prompt_info.points.push_back(582); pipe_result.prompt_info.points.push_back(0); pipe_result.prompt_info.points.push_back(0); pipe_result.prompt_info.labels.push_back(2); pipe_result.prompt_info.labels.push_back(3); pipe_result.prompt_info.labels.push_back(-1); pipe->Predict(bgr, pipe_result); pipe->Draw(bgr, pipe_result); break; default: break; } return 0; } 点选择:
矩形选择:
