
阅读量:0
快速排序(下)

前言
在上一篇文章中我们了解了快速排序算法,但那是Hoare的版本,其实还有别的版本:一种是挖坑法,它们的区别主要在于如何找基准值。霍尔的版本思路难理解但代码好理解,挖坑法则是思路好理解但代码不好理解;还有一种是lomuto的前后指针法。
此外,还有不使用递归的快排方法(找基准值还是用的三种方法之一)。
本文就来讲解这几种不同的快排方法。
正文
挖坑法
实现思路:
创建左右指针。首先从右向左找出比基准值小的数据,找到后立即放入左边坑中,当前位置变为新的“坑”,然后从左向右找出比基准值大的数据,找到后立即放入右边坑中,当前位置变为新的“坑”,结束循环后将最开始存储的分界值放入当前的“坑”中,返回当前“坑”的下标(即分界值下标)。
画图理解一下什么是“坑”。
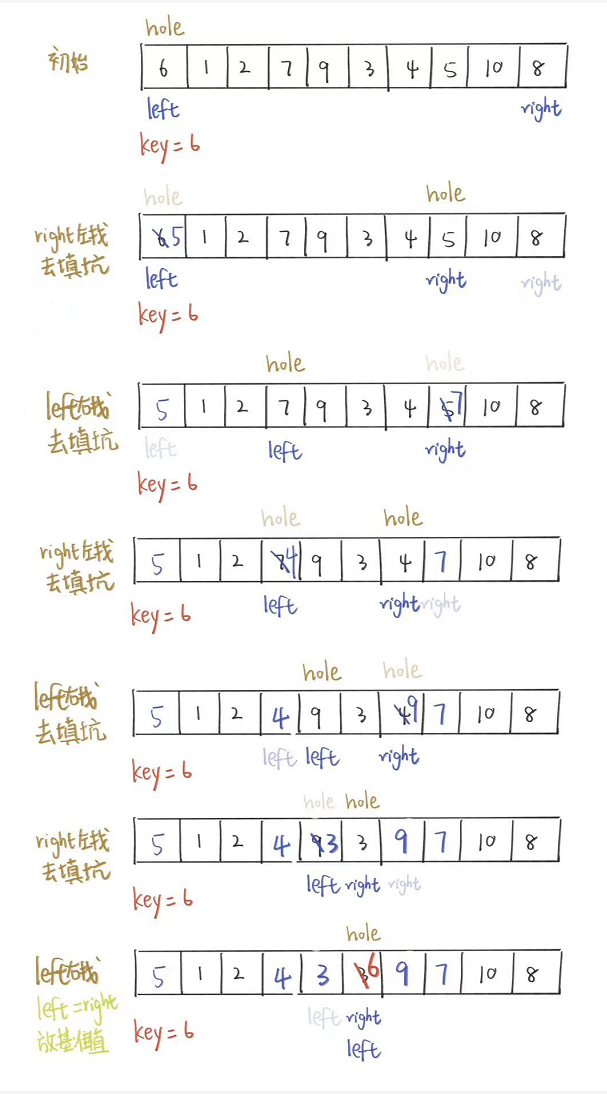
这就是整个“挖坑”然后“填坑”直到left和right重叠时将基准值放到该位置(它该待的位置)的过程。
现在我们可以来写一下挖坑法的代码:
//挖坑法 int _QuickSort(int* arr, int left, int right) { int hole = left; int key = arr[hole]; while (left < right)//注意和霍尔版区别 { //这里同样需要限制且不能是arr[right] >= key,否则可能无法“二分”,最终效率低下 while (left < right && arr[right] > key) { --right; } arr[hole] = arr[right]; hole = right; while (left < right && arr[left] < key) { ++left; } arr[hole] = arr[left]; hole = left; } arr[hole] = key; return hole; } 排序效果
我们在main函数中写这样的代码:
int a[] = { 5, 3, 9, 6, 2, 4, 7, 1, 8 }; int n = sizeof(a) / sizeof(int); printf("排序前: "); PrintArr(a, n);//代码不具体展示 QuickSort(a, 0, n-1); printf("排序后: "); PrintArr(a, n); 执行结果:
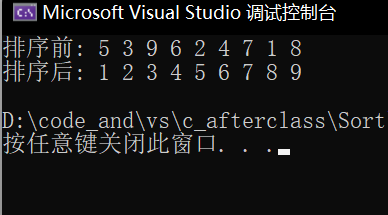
可以看到我们就成功排序了。
lomuto前后指针法
实现思路:
创建前后指针,从左往右找比基准值小的进行交换,使得小的都排在基准值的左边。
其实前后指针对于很多学过数据结构的人来说应该已经不陌生了,但是快排也能用到前后指针法,我们看看具体怎么做:
- 定义两个变量prev和cur,让cur指向位置的数据和key值比较
- 若arr[cur]<arr[key],prev向后走一步并和cur交换
- 若arr[cur]>=arr[key],cur继续往后
- 退出循环后将prev与key值交换,找到基准值
同样不变的思路也是要找基准值,也就是要让基准值左侧的数据都小于基准值,让基准值右侧的数据都大于基准值。
那么两个变量的作用是什么?可以说prev是用来占坑的,而cur用来找小,找到小后就让prev加一后和cur交换。退出循环后将prev与key值交换,就找到了基准值。
代码:
//lomuto前后指针法 int _QuickSort(int* arr, int left, int right) { int prev = left, cur = left + 1; int key = left; while (cur<=right) { if (arr[cur] < arr[key] && ++prev !=cur) //prev和cur相同就不交换 //写为arr[cur] <= arr[key],加上等号也是殊途同归 { Swap(&arr[cur], &arr[prev]); } cur++;//进不进循环cur都要往后走 } Swap(&arr[key], &arr[prev]); return prev; } 执行效果:
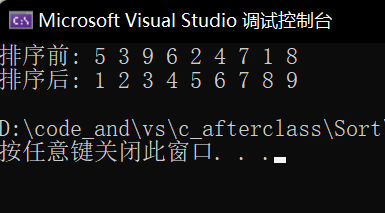
也一样成功排序完了。
可以发现这一种方法比起前面的Hoare版本和挖坑法,在取不取等号的探讨上少了很多麻烦。
注意:
在循环内的if语句中arr[cur] < arr[key]如果写为arr[cur] <= arr[key],并不能解决无法”二分“子序列的问题,所以加不加都无所谓。
这也就是前后指针法的一个**缺陷:如果数组中数据都相等**,效率就会很低。
快排的非递归版本
所以现在已经知道了三种版本的快排,其实也就是三种找基准值的方法。
既然我们的快排使用的是递归,就难免有空间上的缺陷。其实快排还有非递归版本。但是要借助数据结构:栈。
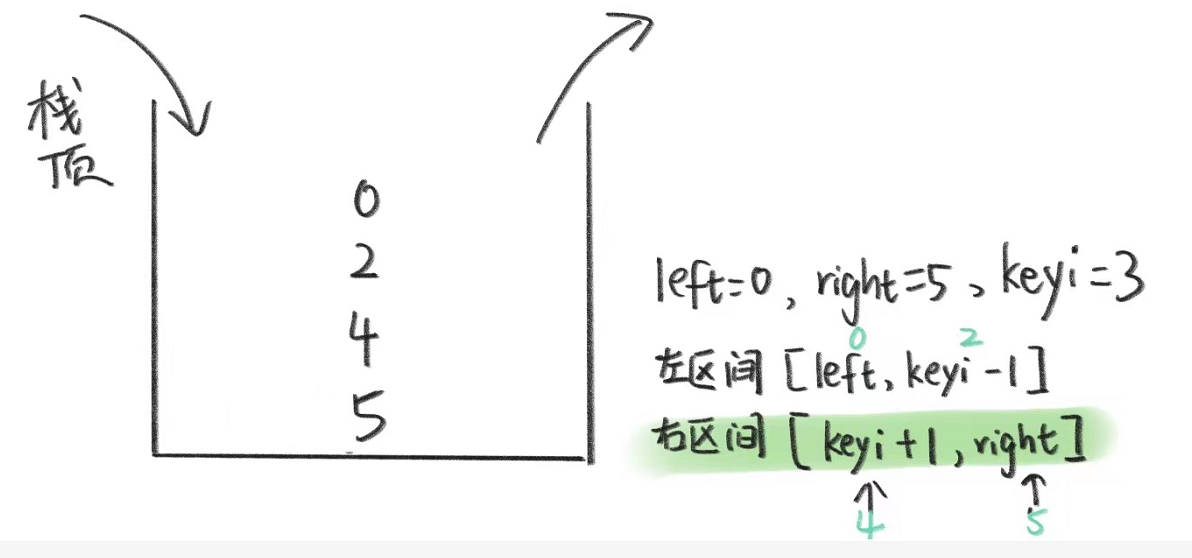
那么现在问题是左右区间再分左右区间时我们怎么找区间呢?因为找基准值时没有使用递归而是在找区间时使用的递归(所以找基准值使用前面说的三种方法的任意一种都行)。
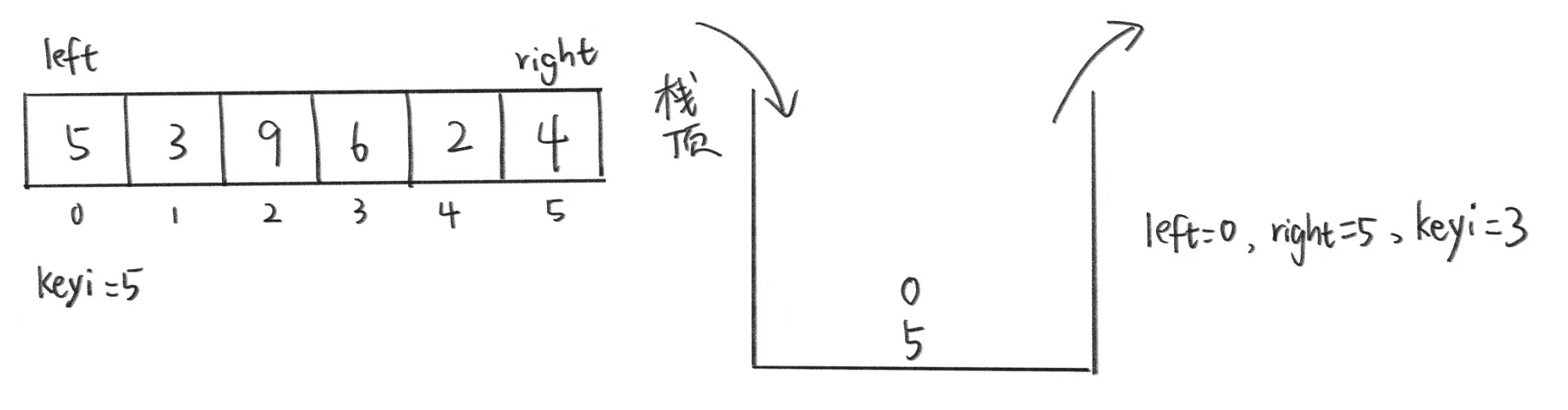
(先将5和0入栈,然后出栈,left=0,right=5,找到基准值为3)
我们知道keyi(基准值)也就能区分左区间和右区间,这两个区间任意哪一个入栈都行。
现在,我们还是一样要现将right入栈再将left入栈(先入右区间),然后再入另一个区间。
此时栈不为空,我们出栈,先出的两个就是左区间,然后去找它的基准值。
然后这样找下去直到right小于left或等于left时,也就是没有数据或者只有一个数据时,构不成有效区间,就不入栈。
左区间所有基准值找完后,就像二叉树一样,开始走右区间。
开始走右区间时也就是刚好栈里剩的两个数据为右区间时。
所以可以看出,我们取栈顶元素就是在模拟递归。
代码参考
现在我们通过代码来看看怎么使用栈进行快排。
//非递归版快排 //借助数据结构——栈 void QuickSortNonR(int* arr, int left, int right) { ST st; STInit(&st); StackPush(&st, right); StackPush(&st, left); while (!StackEmpty(&st)) { //取两次栈顶 int begin = StackTop(&st); StackPop(&st); int end = StackTop(&st); StackPop(&st); //找基准值——用双指针法 int prev = begin; int cur = begin + 1; int keyi = begin; while (cur <= end) { if (arr[cur] <= arr[keyi] && ++prev!=cur) { Swap(&arr[cur], &arr[prev]); } cur++; } Swap(&arr[keyi], &arr[prev]); keyi = prev; //根据基准值划分左右区间 //左区间:[begin,keyi-1] //右区间:[keyi+1,end] if (keyi + 1 < end)//控制区间有效 { StackPush(&st, end); StackPush(&st, keyi + 1); } if (keyi-1>begin)//控制区间有效 { StackPush(&st, keyi - 1); StackPush(&st, begin); } } STDestroy(&st); } 那么到此本文就结束了,祝学习愉快=_=
