
阅读量:0
在上一篇中我们使用自己的数据集训练了一个yolov8检测模型,best.py。
yolov8实战第一天——yolov8部署并训练自己的数据集(保姆式教程)-CSDN博客
yolov8实战第二天——yolov8训练结果分析(保姆式解读)-CSDN博客
接下要对best.py进行TensorRT优化并部署。
TensorRT是一种高性能深度学习推理优化器和运行时加速库,可以为深度学习应用提供低延迟、高吞吐率的部署推理。
TensorRT可用于对超大规模数据中心、嵌入式平台或自动驾驶平台进行推理加速。
TensorRT现已能支持TensorFlow、Caffe、Mxnet、Pytorch等几乎所有的深度学习框架,将TensorRT和NVIDIA的GPU结合起来,能在几乎所有的框架中进行快速和高效的部署推理。
一般的深度学习项目,训练时为了加快速度,会使用多GPU分布式训练。但在部署推理时,为了降低成本,往往使用单个GPU机器甚至嵌入式平台(比如 NVIDIA Jetson)进行部署,部署端也要有与训练时相同的深度学习环境,如caffe,TensorFlow等。
由于训练的网络模型可能会很大(比如,inception,resnet等),参数很多,而且部署端的机器性能存在差异,就会导致推理速度慢,延迟高。这对于那些高实时性的应用场合是致命的,比如自动驾驶要求实时目标检测,目标追踪等。
为了提高部署推理的速度,出现了很多模型优化的方法,如:模型压缩、剪枝、量化、知识蒸馏等,这些一般都是在训练阶段实现优化。
而TensorRT 则是对训练好的模型进行优化,通过优化网络计算图提高模型效率。
一、安装TensorRT
下载TensorRT 。
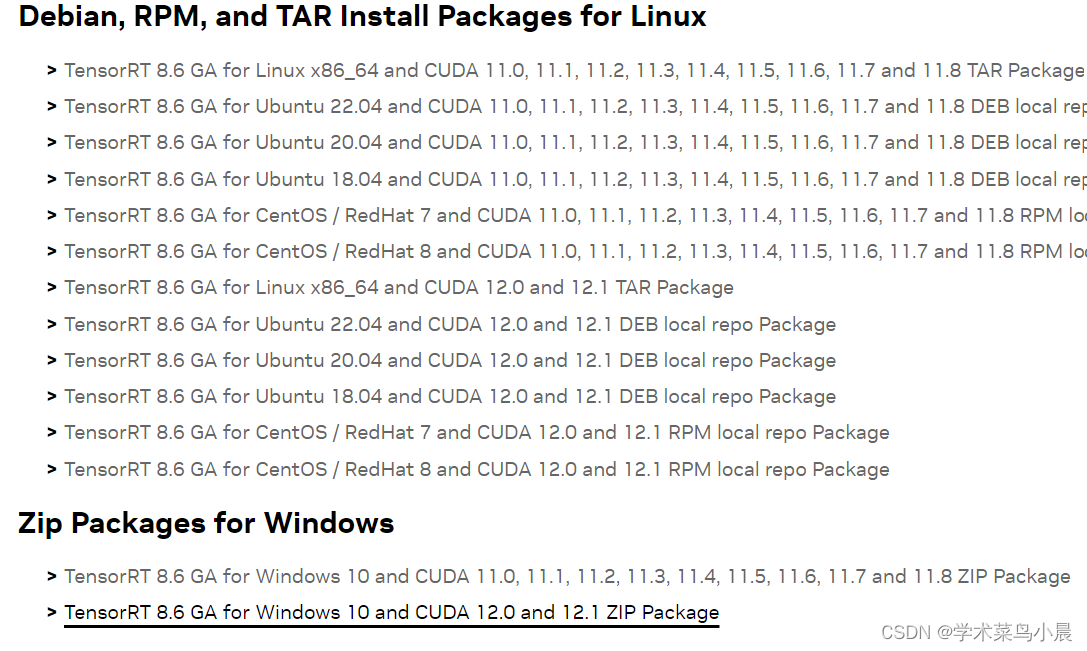
我下载的是8.6里画黑线的那个。
将 TensorRT-8.6.1.6\include中头文件 copy 到C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.7\include
将TensorRT-8.6.1.6\lib 中所有lib文件 copy 到C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.7\lib\x64
将TensorRT-8.6.1.6\lib 中所有dll文件copy 到C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.7\bin
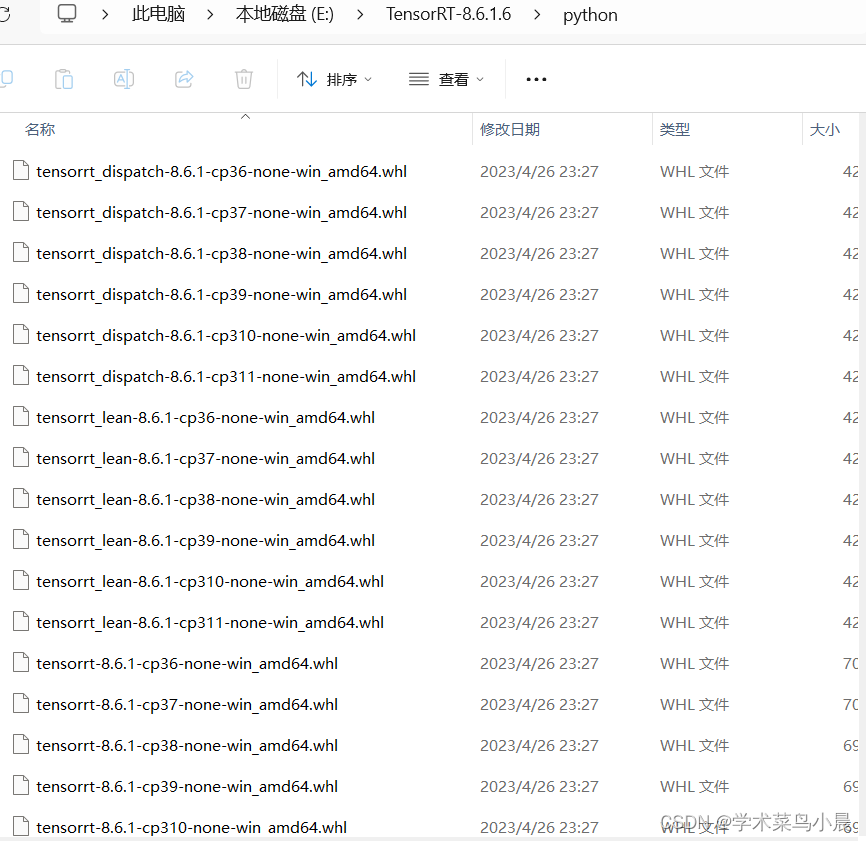
在python文件夹中找到适合自己的。
pip install tensorrt-8.6.1-cp310-none-win_amd64.whl 至此TensorRT安装完成。
至此TensorRT安装完成。
二、pt转onnx:
GitHub - triple-Mu/YOLOv8-TensorRT: YOLOv8 using TensorRT accelerate !
参考着这个,下载,安装环境后。
安装onnx:
pip install onnx -i https://pypi.tuna.tsinghua.edu.cn/simple pip install onnxsim -i https://pypi.tuna.tsinghua.edu.cn/simple pip install onnxruntime -i https://pypi.tuna.tsinghua.edu.cn/simple 生成onnx:
python export-det.py --weights yolov8n.pt --iou-thres 0.65 --conf-thres 0.25 --topk 100 --opset 11 --sim --input-shape 1 3 640 640 --device cuda:0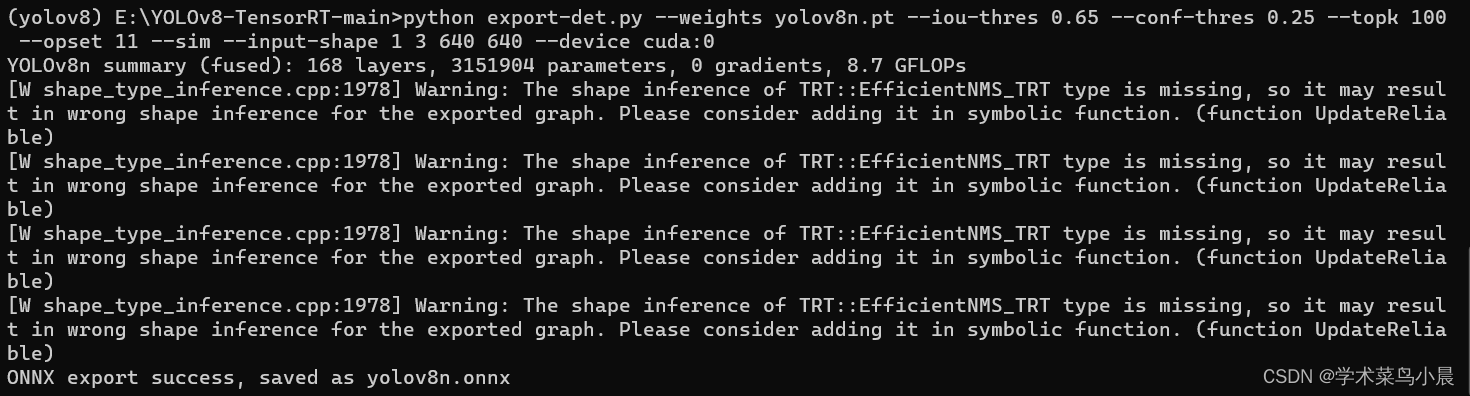
使用上篇文章中的老鼠模型做了测试:

onnx的测试代码:
import onnxruntime as rt import numpy as np import cv2 import matplotlib.pyplot as plt def nms(pred, conf_thres, iou_thres): conf = pred[..., 4] > conf_thres box = pred[conf == True] cls_conf = box[..., 5:] cls = [] for i in range(len(cls_conf)): cls.append(int(np.argmax(cls_conf[i]))) total_cls = list(set(cls)) output_box = [] for i in range(len(total_cls)): clss = total_cls[i] cls_box = [] for j in range(len(cls)): if cls[j] == clss: box[j][5] = clss cls_box.append(box[j][:6]) cls_box = np.array(cls_box) box_conf = cls_box[..., 4] box_conf_sort = np.argsort(box_conf) max_conf_box = cls_box[box_conf_sort[len(box_conf) - 1]] output_box.append(max_conf_box) cls_box = np.delete(cls_box, 0, 0) while len(cls_box) > 0: max_conf_box = output_box[len(output_box) - 1] del_index = [] for j in range(len(cls_box)): current_box = cls_box[j] interArea = getInter(max_conf_box, current_box) iou = getIou(max_conf_box, current_box, interArea) if iou > iou_thres: del_index.append(j) cls_box = np.delete(cls_box, del_index, 0) if len(cls_box) > 0: output_box.append(cls_box[0]) cls_box = np.delete(cls_box, 0, 0) return output_box def getIou(box1, box2, inter_area): box1_area = box1[2] * box1[3] box2_area = box2[2] * box2[3] union = box1_area + box2_area - inter_area iou = inter_area / union return iou def getInter(box1, box2): box1_x1, box1_y1, box1_x2, box1_y2 = box1[0] - box1[2] / 2, box1[1] - box1[3] / 2, \ box1[0] + box1[2] / 2, box1[1] + box1[3] / 2 box2_x1, box2_y1, box2_x2, box2_y2 = box2[0] - box2[2] / 2, box2[1] - box1[3] / 2, \ box2[0] + box2[2] / 2, box2[1] + box2[3] / 2 if box1_x1 > box2_x2 or box1_x2 < box2_x1: return 0 if box1_y1 > box2_y2 or box1_y2 < box2_y1: return 0 x_list = [box1_x1, box1_x2, box2_x1, box2_x2] x_list = np.sort(x_list) x_inter = x_list[2] - x_list[1] y_list = [box1_y1, box1_y2, box2_y1, box2_y2] y_list = np.sort(y_list) y_inter = y_list[2] - y_list[1] inter = x_inter * y_inter return inter def draw(img, xscale, yscale, pred): img_ = img.copy() if len(pred): for detect in pred: detect = [int((detect[0] - detect[2] / 2) * xscale), int((detect[1] - detect[3] / 2) * yscale), int((detect[0]+detect[2] / 2) * xscale), int((detect[1]+detect[3] / 2) * yscale)] img_ = cv2.rectangle(img, (detect[0], detect[1]), (detect[2], detect[3]), (0, 255, 0), 1) return img_ if __name__ == '__main__': height, width = 640, 640 img0 = cv2.imread('mouse-4-6-0004.jpg') x_scale = img0.shape[1] / width y_scale = img0.shape[0] / height img = img0 / 255. img = cv2.resize(img, (width, height)) img = np.transpose(img, (2, 0, 1)) data = np.expand_dims(img, axis=0) sess = rt.InferenceSession('best.onnx') input_name = sess.get_inputs()[0].name label_name = sess.get_outputs()[0].name pred = sess.run([label_name], {input_name: data.astype(np.float32)})[0] pred = np.squeeze(pred) pred = np.transpose(pred, (1, 0)) pred_class = pred[..., 4:] pred_conf = np.max(pred_class, axis=-1) pred = np.insert(pred, 4, pred_conf, axis=-1) result = nms(pred, 0.3, 0.45) ret_img = draw(img0, x_scale, y_scale, result) ret_img = ret_img[:, :, ::-1] plt.imshow(ret_img) plt.show()
三、TensorRT部署
导出engine模型:
python build.py --weights yolov8n.onnx --iou-thres 0.65 --conf-thres 0.25 --topk 100 --fp16 --device cuda:0
等待一会,engine成功导出。
使用python脚本进行推理:
python infer-det.py --engine yolov8n.engine --imgs data --show --out-dir outputs --out-dir outputs --device cuda:0infer-det.py:
from models import TRTModule # isort:skip import argparse from pathlib import Path import cv2 import torch from config import CLASSES, COLORS from models.torch_utils import det_postprocess from models.utils import blob, letterbox, path_to_list def main(args: argparse.Namespace) -> None: device = torch.device(args.device) Engine = TRTModule(args.engine, device) H, W = Engine.inp_info[0].shape[-2:] # set desired output names order Engine.set_desired(['num_dets', 'bboxes', 'scores', 'labels']) images = path_to_list(args.imgs) save_path = Path(args.out_dir) if not args.show and not save_path.exists(): save_path.mkdir(parents=True, exist_ok=True) for image in images: save_image = save_path / image.name bgr = cv2.imread(str(image)) draw = bgr.copy() bgr, ratio, dwdh = letterbox(bgr, (W, H)) rgb = cv2.cvtColor(bgr, cv2.COLOR_BGR2RGB) tensor = blob(rgb, return_seg=False) dwdh = torch.asarray(dwdh * 2, dtype=torch.float32, device=device) tensor = torch.asarray(tensor, device=device) # inference data = Engine(tensor) bboxes, scores, labels = det_postprocess(data) if bboxes.numel() == 0: # if no bounding box print(f'{image}: no object!') continue bboxes -= dwdh bboxes /= ratio for (bbox, score, label) in zip(bboxes, scores, labels): bbox = bbox.round().int().tolist() cls_id = int(label) cls = CLASSES[cls_id] color = COLORS[cls] cv2.rectangle(draw, bbox[:2], bbox[2:], color, 2) cv2.putText(draw, f'{cls}:{score:.3f}', (bbox[0], bbox[1] - 2), cv2.FONT_HERSHEY_SIMPLEX, 0.75, [225, 255, 255], thickness=2) if args.show: cv2.imshow('result', draw) cv2.waitKey(0) else: cv2.imwrite(str(save_image), draw) def parse_args() -> argparse.Namespace: parser = argparse.ArgumentParser() parser.add_argument('--engine', type=str, help='Engine file') parser.add_argument('--imgs', type=str, help='Images file') parser.add_argument('--show', action='store_true', help='Show the detection results') parser.add_argument('--out-dir', type=str, default='./output', help='Path to output file') parser.add_argument('--device', type=str, default='cuda:0', help='TensorRT infer device') args = parser.parse_args() return args if __name__ == '__main__': args = parse_args() main(args) 

