
阅读量:0
文章目录
🍃作者介绍:双非本科大三网络工程专业在读,阿里云专家博主,专注于Java领域学习,擅长web应用开发、数据结构和算法,初步涉猎人工智能和前端开发。
🦅个人主页:@逐梦苍穹
📕所属专栏:人工智能
🌻gitee地址:xzl的人工智能代码仓库
✈ 您的一键三连,是我创作的最大动力🌹
1、简介
传统的梯度下降优化算法中,可能会碰到以下情况:
碰到平缓区域,梯度值较小,参数优化变慢,碰到 “鞍点” ,梯度为 0,参数无法优化,碰到局部最小值。
对于这些问题, 出现了一些对梯度下降算法的优化方法,例如:Momentum、AdaGrad、RMSprop、Adam 等.
2、指数加权平均
我们最常见的算数平均指的是将所有数加起来除以数的个数,每个数的权重是相同的。
加权平均指的是给每个数赋予不同的权重求得平均数。
移动平均数,指的是计算最近邻的 N 个数来获得平均数。
指数移动加权平均则是参考各数值,并且各数值的权重都不同,距离越远的数字对平均数计算的贡献就越小(权重较小),距离越近则对平均数的计算贡献就越大(权重越大)。
比如:明天气温怎么样,和昨天气温有很大关系,而和一个月前的气温关系就小一些。
2.1、公式
计算公式可以用下面的式子来表示: [ S t = { Y 1 , t = 0 β ∗ S t − 1 + ( 1 − β ) ∗ Y t , t > 0 ] [ S_t = \begin{cases} Y_1, & \text{t = 0} \\ \beta \ast S_{t-1} + (1 - \beta) \ast Y_t, & \text{t > 0} \end{cases} ] [St={Y1,β∗St−1+(1−β)∗Yt,t = 0t > 0]
- S t S_t St表示指数加权平均值;
- Y t Y_t Yt表示 t 时刻的值;
- β β β 调节权重系数,该值越大平均数越平缓。
2.2、代码
我们接下来通过一段代码来看下结果,我们随机产生进 30 天的气温数据:
# -*- coding: utf-8 -*- # @Author: CSDN@逐梦苍穹 # @Time: 2024/7/29 1:34 import torch import matplotlib.pyplot as plt ELEMENT_NUMBER = 30 # 定义温度数据的天数 # 1. 实际平均温度 def test01(): # 固定随机数种子,确保每次运行结果一致 torch.manual_seed(0) # 产生30天的随机温度数据,温度服从正态分布,均值为0,标准差为10 temperature = torch.randn(size=[ELEMENT_NUMBER, ]) * 10 print(temperature) # 生成代表天数的数组,从1到30 days = torch.arange(1, ELEMENT_NUMBER + 1, 1) # 绘制温度变化曲线 plt.figure() plt.plot(days, temperature, color='r') plt.scatter(days, temperature) # 绘制散点图 plt.xlabel('Days') # X轴标签 plt.ylabel('Temperature') # Y轴标签 plt.title('Actual Temperature Over 30 Days') # 图标题 # plt.show() # 2. 指数加权平均温度 def test02(beta=0.9): # 固定随机数种子,确保每次运行结果一致 torch.manual_seed(0) # 产生30天的随机温度数据,温度服从正态分布,均值为0,标准差为10 temperature = torch.randn(size=[ELEMENT_NUMBER, ]) * 10 print(temperature) exp_weight_avg = [] # 存储指数加权平均温度的列表 # 计算每一天的指数加权平均温度 for idx, temp in enumerate(temperature, 1): # 第一个元素的 EWA 值等于自身 if idx == 1: exp_weight_avg.append(temp) continue # 第二个及之后的元素的 EWA 值等于上一个 EWA 乘以 β + 当前温度乘以 (1-β) new_temp = exp_weight_avg[idx - 2] * beta + (1 - beta) * temp exp_weight_avg.append(new_temp) # 生成代表天数的数组,从1到30 days = torch.arange(1, ELEMENT_NUMBER + 1, 1) # 绘制指数加权平均温度变化曲线 plt.figure() plt.plot(days, exp_weight_avg, color='r') plt.scatter(days, temperature) # 绘制实际温度的散点图 plt.xlabel('Days') # X轴标签 plt.ylabel('Temperature') # Y轴标签 plt.title(f'Exponentially Weighted Average Temperature (beta={beta})') # 图标题,包含beta值 # plt.show() if __name__ == '__main__': # 调用test01函数,绘制实际温度图 test01() # 调用test02函数,绘制beta为0.5的EWA温度图 test02(0.5) # 调用test02函数,绘制beta为0.9的EWA温度图 test02(0.9) plt.show() 程序结果如下: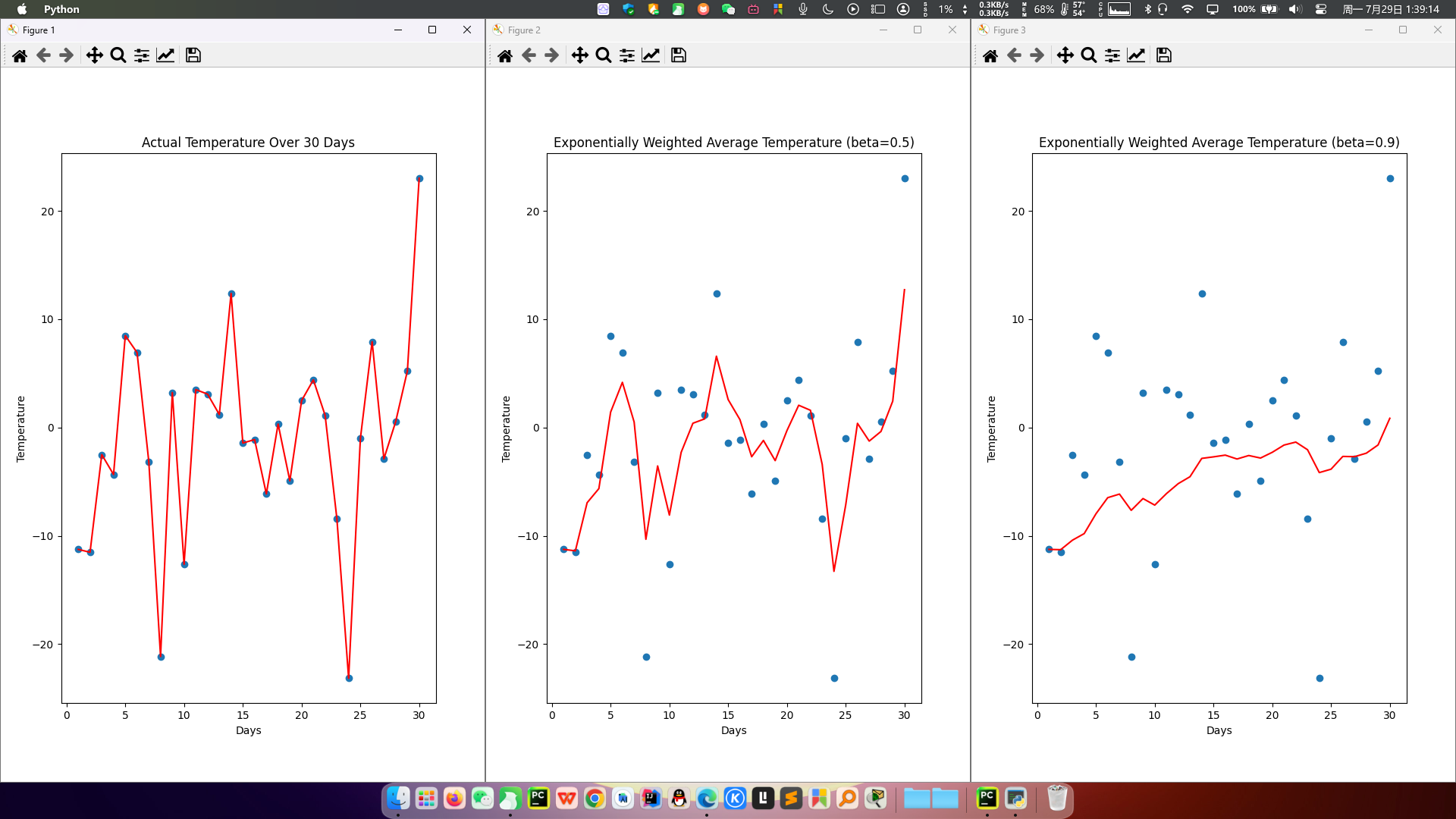
从程序运行结果可以看到:
指数加权平均绘制出的气氛变化曲线更加平缓;
β 的值越大,则绘制出的折线越加平缓; β 值一般默认都是 0.9.
3、Momentum⭐
Momentum->动量
当梯度下降碰到 “峡谷” 、”平缓”、”鞍点” 区域时, 参数更新速度变慢。
Momentum 通过指数加权平均法,累计历史梯度值,进行参数更新,越近的梯度值对当前参数更新的重要性越大。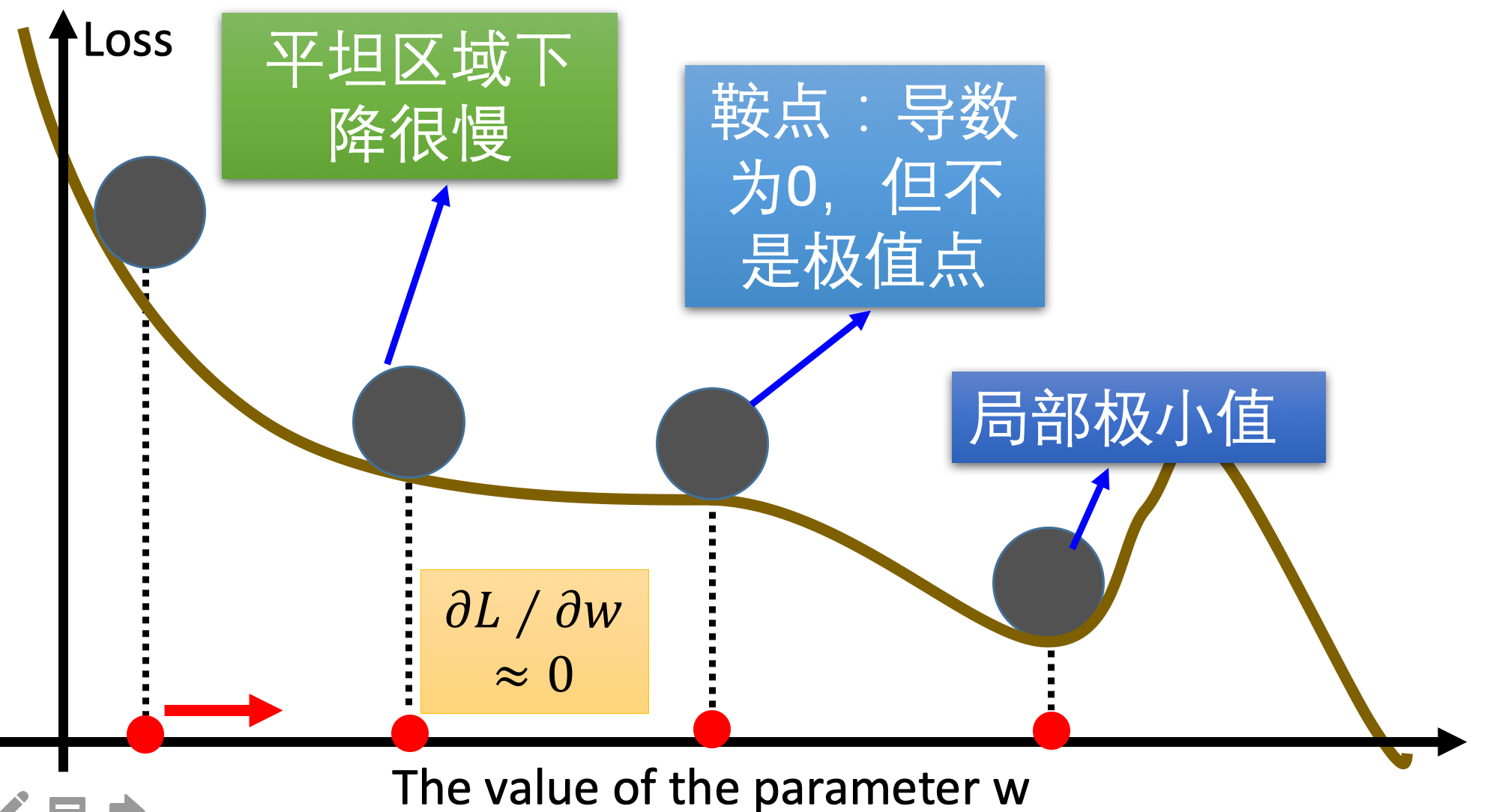
3.1、公式演变
梯度的指数加权平均(Exponential Moving Average, EMA)的一般公式如下:
S t = β S t − 1 + ( 1 − β ) D t S_t = \beta S_{t-1} + (1 - \beta) D_t St=βSt−1+(1−β)Dt
其中:
- S t S_t St:当前时刻的加权移动平均值
- S t − 1 S_{t-1} St−1:上一个时刻的加权移动平均值
- D t D_t Dt:当前时刻的梯度值
- β \beta β:权重系数(0 到 1 之间的值)
解释:
- S t − 1 S_{t-1} St−1 表示历史梯度的移动加权平均值(上一个时刻的 EMA)。
- D t D_t Dt 表示当前时刻的梯度值。
- β \beta β 为权重系数,表示历史梯度与前 EMA 中的权重。
咱们举个例子,假设:权重 β \beta β 为 0.9,例如:
第一次梯度值: s 1 = d 1 = w 1 s_1 = d_1 = w_1 s1=d1=w1
第二次梯度值: s 2 = 0.9 ∗ s 1 + d 2 ∗ 0.1 s_2 = 0.9 \ast s_1 + d_2 \ast 0.1 s2=0.9∗s1+d2∗0.1
第三次梯度值: s 3 = 0.9 ∗ s 2 + d 3 ∗ 0.1 s_3 = 0.9 \ast s_2 + d_3 \ast 0.1 s3=0.9∗s2+d3∗0.1
第四次梯度值: s 4 = 0.9 ∗ s 3 + d 4 ∗ 0.1 s_4 = 0.9 \ast s_3 + d_4 \ast 0.1 s4=0.9∗s3+d4∗0.1
- w w w 表示初始梯度
- d d d 表示当前轮数计算出的梯度值
- s s s 表示历史梯度值
梯度下降公式中梯度的计算,就不再是当前时刻 t t t 的梯度值,而是历史梯度值的指数移动加权平均值。
公式修改为: W t + 1 = W t − α ∗ D t W_{t+1} = W_t - \alpha \ast D_t Wt+1=Wt−α∗Dt
那么,Monmentum 优化方法是如何一定程度上克服 “平缓”、”鞍点”、”峡谷” 的问题呢?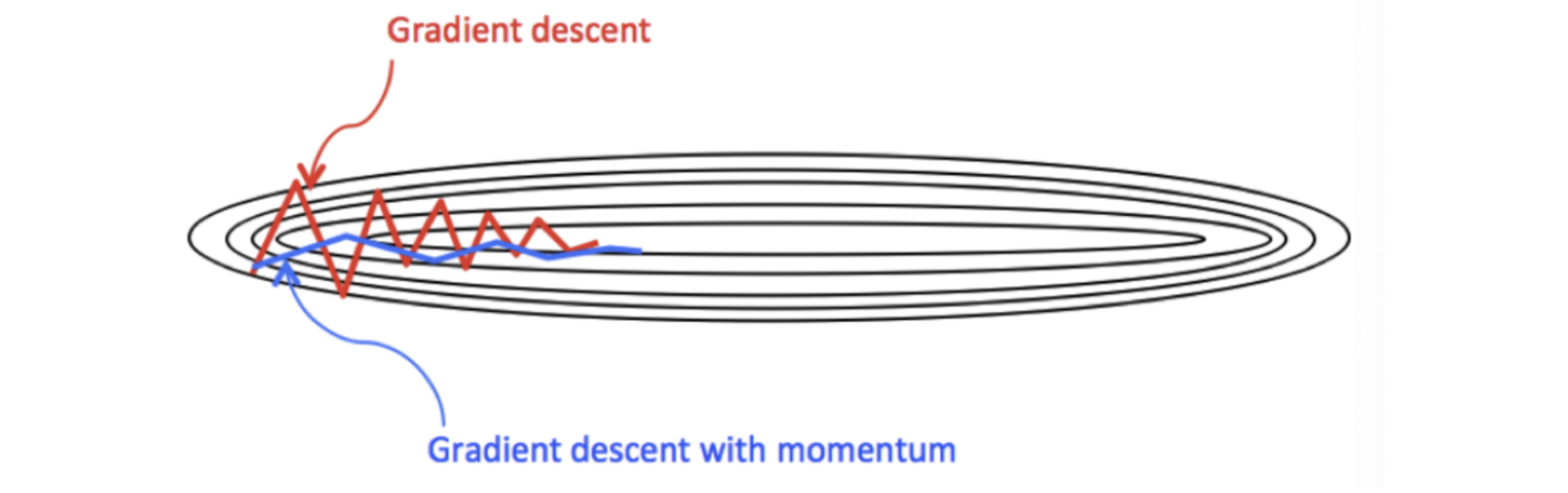
当处于鞍点位置时,由于当前的梯度为 0,参数无法更新。
但是 Momentum 动量梯度下降算法已经在先前积累了一些梯度值,很有可能使得跨过鞍点。
由于 mini-batch 普通的梯度下降算法,每次选取少数的样本梯度确定前进方向,可能会出现震荡,使得训练时间变长。
Momentum 使用移动加权平均,平滑了梯度的变化,使得前进方向更加平缓,有利于加快训练过程。一定程度上有利于降低 “峡谷” 问题的影响。
峡谷问题:就是会使得参数更新出现剧烈震荡
Momentum 算法可以理解为是对梯度值的一种调整,我们知道梯度下降算法中还有一个很重要的学习率,Momentum 并没有学习率进行优化。
3.2、代码
# -*- coding: utf-8 -*- # @Author: CSDN@逐梦苍穹 # @Time: 2024/7/29 2:23 import numpy as np import matplotlib.pyplot as plt # 初始化参数 theta = np.random.randn(2) # 假设我们有两个参数,随机初始化 alpha = 0.1 # 初始学习率 beta = 0.9 # 动量系数 velocity = np.zeros_like(theta) # 初始化动量为零向量 # 定义一个简单的二次损失函数 def loss_function(theta): return theta[0] ** 2 + theta[1] ** 2 # 损失函数:J(θ) = θ[0]^2 + θ[1]^2 # 计算梯度 def compute_gradient(theta): return 2 * theta # 梯度:∇J(θ) = [2*θ[0], 2*θ[1]] # 进行梯度下降迭代 iterations = 100 # 设定迭代次数 theta_history = [] # 存储每次迭代的theta值 loss_history = [] # 存储每次迭代的损失值 for _ in range(iterations): gradient = compute_gradient(theta) # 计算梯度 velocity = beta * velocity + (1 - beta) * gradient # 更新动量项 v_t = β * v_{t-1} + (1 - β) * g_t theta -= alpha * velocity # 更新参数 θ = θ - α * v_t # 记录参数和损失值以便后续绘图 theta_history.append(theta.copy()) # 记录当前theta值 loss_history.append(loss_function(theta)) # 记录当前损失值 print(f"Updated parameters: {theta}, Loss: {loss_function(theta)}") # 打印当前参数和损失值 print(f"Optimized parameters: {theta}") # 打印最终优化后的参数 # 绘制参数更新轨迹 theta_history = np.array(theta_history) # 将theta历史记录转换为NumPy数组 plt.figure(figsize=(12, 6)) # 创建一个12x6英寸的图形 plt.subplot(1, 2, 1) # 创建1行2列的子图,选择第一个子图 plt.plot(theta_history[:, 0], theta_history[:, 1], 'o-', markersize=4) # 绘制theta[0]和theta[1]的变化轨迹 plt.title('Parameter Update Path with Momentum') # 设置子图标题 plt.xlabel('Theta[0]') # 设置x轴标签 plt.ylabel('Theta[1]') # 设置y轴标签 # 绘制损失函数值变化 plt.subplot(1, 2, 2) # 选择第二个子图 plt.plot(loss_history, 'r-') # 绘制损失值变化曲线,红色实线 plt.title('Loss Function Value with Momentum') # 设置子图标题 plt.xlabel('Iteration') # 设置x轴标签 plt.ylabel('Loss') # 设置y轴标签 plt.tight_layout() # 自动调整子图布局 plt.show() # 显示图形 结果: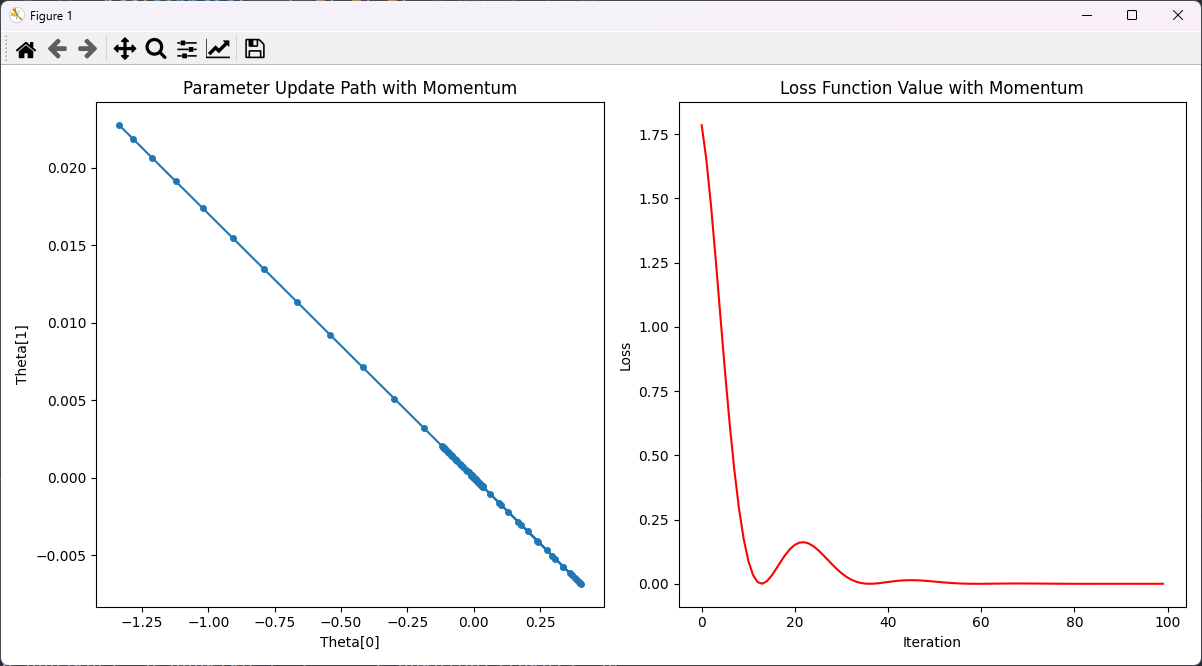
解释:
- 损失函数值在初始时较高,随着迭代次数的增加,损失值迅速下降。
- 在前几次迭代中,损失值下降速度非常快,这是因为动量法在初始阶段累积了较大的梯度,使得参数更新步长较大。
- 在迭代到大约20次时,损失值出现了一些波动,这是动量法的特性导致的,它在接近极小值时可能会因累积的动量过大而出现短暂的反弹。
- 最终,损失值趋于平稳,表明模型参数已接近最优值,优化过程收敛。
4、AdaGrad
AdaGrad 通过对不同的参数分量使用不同的学习率,AdaGrad 的学习率总体会逐渐减小。
这是因为 AdaGrad 认为:在起初时,我们距离最优目标仍较远,可以使用较大的学习率,加快训练速度,随着迭代次数的增加,学习率逐渐下降。
4.1、计算步骤
AdaGrad计算步骤如下:
- 初始化
- 初始学习率 α \alpha α
- 初始参数 θ \theta θ
- 小常数 ϵ \epsilon ϵ,通常为 1 × 1 0 − 6 1 \times 10^{-6} 1×10−6
- 初始化梯度累积变量 s = 0 s = 0 s=0
- 从训练集中采样
- 从训练集中采样 m m m 个样本的小批量,计算梯度 g g g
- 累积平方梯度
- 更新累积平方梯度: s = s + g ⊙ g s = s + g \odot g s=s+g⊙g
其中, ⊙ \odot ⊙ 表示逐个分量相乘(即逐元素相乘)
- 更新累积平方梯度: s = s + g ⊙ g s = s + g \odot g s=s+g⊙g
- 调整学习率
- 根据累积平方梯度调整学习率 α \alpha α: α t = α s + ϵ \alpha_t = \frac{\alpha}{\sqrt{s + \epsilon}} αt=s+ϵα
- 更新参数
- 使用调整后的学习率更新参数 θ \theta θ: θ = θ − α t ⊙ g \theta = \theta - \alpha_t \odot g θ=θ−αt⊙g
- 重复步骤2-5
- 继续重复步骤2-5,直到满足停止条件(如迭代次数或误差足够小)
参数更新公式如下:
- 累积平方梯度公式: s = s + g ⊙ g s = s + g \odot g s=s+g⊙g
- 调整学习率公式: α t = α s + ϵ \alpha_t = \frac{\alpha}{\sqrt{s + \epsilon}} αt=s+ϵα
- 参数更新公式: θ = θ − α t ⊙ g \theta = \theta - \alpha_t \odot g θ=θ−αt⊙g
4.2、代码示例
# -*- coding: utf-8 -*- # @Author: CSDN@逐梦苍穹 # @Time: 2024/7/29 2:08 import numpy as np # 导入NumPy库,用于数值计算 import matplotlib.pyplot as plt # 导入Matplotlib库,用于绘图 # 初始化参数 theta = np.random.randn(2) # 假设我们有两个参数,随机初始化 alpha = 0.1 # 初始学习率 eps = 1e-10 # 防止除零的小常数 s = np.zeros_like(theta) # 初始化累积梯度平方和为与theta相同形状的零向量 # 定义一个简单的二次损失函数 def loss_function(theta): return theta[0]**2 + theta[1]**2 # 损失函数:J(θ) = θ[0]^2 + θ[1]^2 # 计算梯度 def compute_gradient(theta): return 2 * theta # 梯度:∇J(θ) = [2*θ[0], 2*θ[1]] # 进行梯度下降迭代 iterations = 100 # 设定迭代次数 theta_history = [] # 存储每次迭代的theta值 loss_history = [] # 存储每次迭代的损失值 for _ in range(iterations): gradient = compute_gradient(theta) # 计算梯度 s += gradient**2 # 更新累积梯度平方和 s = s + g_t ⊙ g_t adjusted_alpha = alpha / (np.sqrt(s) + eps) # 调整学习率 α_t = α / (√s + ε) theta -= adjusted_alpha * gradient # 更新参数 θ = θ - α_t ⊙ g_t # 记录参数和损失值以便后续绘图 theta_history.append(theta.copy()) # 记录当前theta值 loss_history.append(loss_function(theta)) # 记录当前损失值 print(f"Updated parameters: {theta}, Loss: {loss_function(theta)}") # 打印当前参数和损失值 print(f"Optimized parameters: {theta}") # 打印最终优化后的参数 # 绘制参数更新轨迹 theta_history = np.array(theta_history) # 将theta历史记录转换为NumPy数组 plt.figure(figsize=(12, 6)) # 创建一个12x6英寸的图形 plt.subplot(1, 2, 1) # 创建1行2列的子图,选择第一个子图 plt.plot(theta_history[:, 0], theta_history[:, 1], 'o-', markersize=4) # 绘制theta[0]和theta[1]的变化轨迹 plt.title('Parameter Update Path') # 设置子图标题 plt.xlabel('Theta[0]') # 设置x轴标签 plt.ylabel('Theta[1]') # 设置y轴标签 # 绘制损失函数值变化 plt.subplot(1, 2, 2) # 选择第二个子图 plt.plot(loss_history, 'r-') # 绘制损失值变化曲线,红色实线 plt.title('Loss Function Value') # 设置子图标题 plt.xlabel('Iteration') # 设置x轴标签 plt.ylabel('Loss') # 设置y轴标签 plt.tight_layout() # 自动调整子图布局 plt.show() # 显示图形 结果: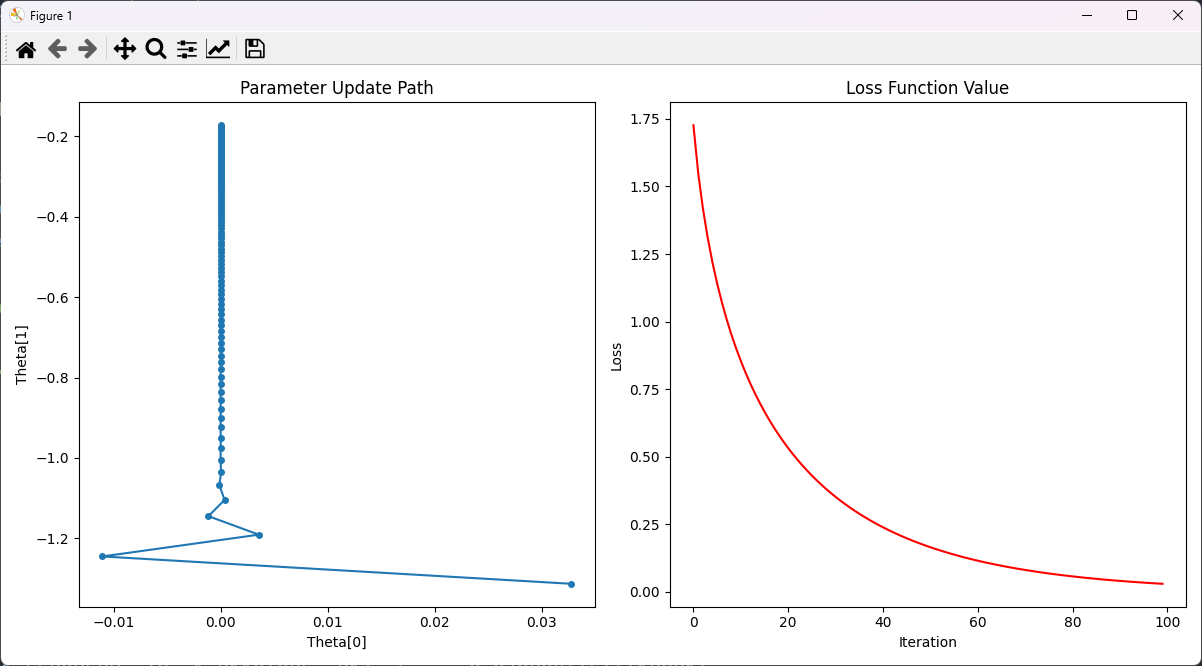
这两个子图展示了AdaGrad算法在优化过程中如何通过自适应调整学习率来更新参数,从而有效地减少损失函数值。
具体来说:
- 参数更新路径:展示了参数在迭代过程中如何逐渐接近最优值,路径上的点和线条表明参数更新的方向和幅度。
- 损失函数值:展示了损失值如何随迭代次数减少,反映了模型逐步优化的过程。
AdaGrad 缺点是可能会使得学习率过早、过量的降低,导致模型训练后期学习率太小,较难找到最优解。
5、RMSProp
RMSProp 优化算法是对 AdaGrad 的优化。
最主要的不同是:使用指数移动加权平均梯度替换历史梯度的平方和。
5.1、公式
其计算过程如下:
- 初始化学习率 α \alpha α、初始化参数 θ \theta θ、小常数 σ = 1 e − 6 \sigma = 1e-6 σ=1e−6
- 初始化参数 θ \theta θ
- 初始化梯度累计变量 s s s
- 从训练集中采样 m m m 个样本的小批量,计算梯度 g g g
- 使用指数移动平均累积历史梯度,公式: s = β ⋅ s + ( 1 − β ) g ⊙ g s = \beta \cdot s + (1 - \beta)g \odot g s=β⋅s+(1−β)g⊙g
- β \beta β 是权重系数,控制历史梯度和当前梯度的比例。
- s s s 是梯度的累积平方和,用于调整学习率。
- g g g 是当前的梯度, g ⊙ g g \odot g g⊙g 表示逐元素平方。
学习率 α \alpha α 的计算公式: α = α s + σ \alpha = \frac{\alpha}{\sqrt{s + \sigma}} α=s+σα
- 这个公式计算的是调整后的学习率。
- α \alpha α 是初始学习率。
- s s s 是累积的梯度平方和。
- σ \sigma σ 是一个小常数,防止分母为零。
参数更新公式: θ = θ − α s + σ ⋅ g \theta = \theta - \frac{\alpha}{\sqrt{s + \sigma}} \cdot g θ=θ−s+σα⋅g
- 这个公式用于更新参数 θ \theta θ。
- θ \theta θ 是当前的参数值。
- α \alpha α 是初始学习率。
- s s s 是累积的梯度平方和。
- σ \sigma σ 是一个小常数。
- g g g 是当前的梯度。
这些公式共同作用,通过动态调整学习率来更新参数,使模型逐步逼近最优解。
5.2、代码
# -*- coding: utf-8 -*- # @Author: CSDN@逐梦苍穹 # @Time: 2024/7/29 2:30 import numpy as np import matplotlib.pyplot as plt # 初始化参数 theta = np.random.randn(2) # 假设我们有两个参数,随机初始化 alpha = 0.1 # 初始学习率 beta = 0.9 # 指数移动平均的衰减系数 eps = 1e-6 # 防止除零的小常数 s = np.zeros_like(theta) # 初始化累积梯度平方和 # 定义一个简单的二次损失函数 def loss_function(theta): return theta[0] ** 2 + theta[1] ** 2 # 损失函数:J(θ) = θ[0]^2 + θ[1]^2 # 计算梯度 def compute_gradient(theta): return 2 * theta # 梯度:∇J(θ) = [2*θ[0], 2*θ[1]] # 进行梯度下降迭代 iterations = 100 # 设定迭代次数 theta_history = [] # 存储每次迭代的theta值 loss_history = [] # 存储每次迭代的损失值 for _ in range(iterations): gradient = compute_gradient(theta) # 计算梯度 s = beta * s + (1 - beta) * (gradient ** 2) # 更新累积梯度平方和 s = β * s + (1 - β) * g_t ⊙ g_t adjusted_alpha = alpha / (np.sqrt(s) + eps) # 调整学习率 α_t = α / (√s + ε) theta -= adjusted_alpha * gradient # 更新参数 θ = θ - α_t ⊙ g_t # 记录参数和损失值以便后续绘图 theta_history.append(theta.copy()) # 记录当前theta值 loss_history.append(loss_function(theta)) # 记录当前损失值 print(f"Updated parameters: {theta}, Loss: {loss_function(theta)}") # 打印当前参数和损失值 print(f"Optimized parameters: {theta}") # 打印最终优化后的参数 # 绘制参数更新轨迹 theta_history = np.array(theta_history) # 将theta历史记录转换为NumPy数组 plt.figure(figsize=(12, 6)) # 创建一个12x6英寸的图形 plt.subplot(1, 2, 1) # 创建1行2列的子图,选择第一个子图 plt.plot(theta_history[:, 0], theta_history[:, 1], 'o-', markersize=4) # 绘制theta[0]和theta[1]的变化轨迹 plt.title('Parameter Update Path with RMSProp') # 设置子图标题 plt.xlabel('Theta[0]') # 设置x轴标签 plt.ylabel('Theta[1]') # 设置y轴标签 # 绘制损失函数值变化 plt.subplot(1, 2, 2) # 选择第二个子图 plt.plot(loss_history, 'r-') # 绘制损失值变化曲线,红色实线 plt.title('Loss Function Value with RMSProp') # 设置子图标题 plt.xlabel('Iteration') # 设置x轴标签 plt.ylabel('Loss') # 设置y轴标签 plt.tight_layout() # 自动调整子图布局 plt.show() # 显示图形 运行: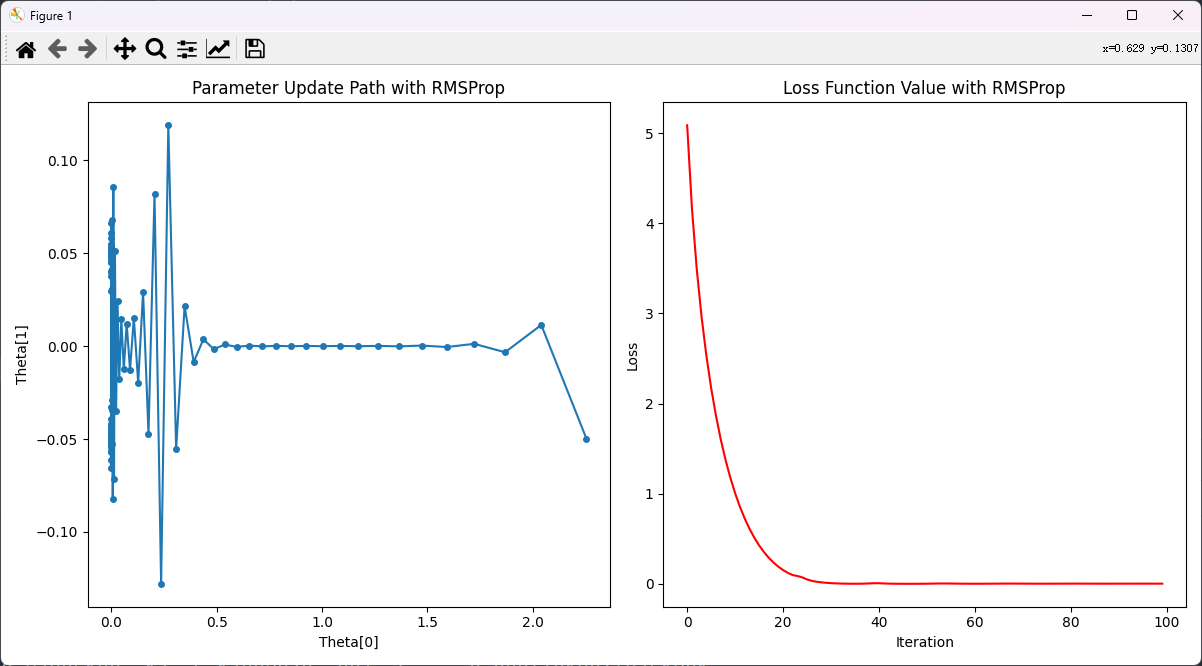
解释:
- 损失函数值在初始时较高,随着迭代次数的增加,损失值迅速下降。
- 在前几次迭代中,损失值下降速度非常快,这是因为RMSProp算法在初始阶段调整了每个参数的学习率,使得参数更新步长较大。
- 随着迭代次数的增加,损失值逐渐趋于平稳,表明模型参数已接近最优值,优化过程收敛。
5.3、小结
RMSProp 与 AdaGrad 最大的区别是对梯度的累积方式不同,对于每个梯度分量仍然使用不同的学习率。
RMSProp 通过引入衰减系数 β,控制历史梯度对历史梯度信息获取的多少。
被证明在神经网络非凸条件下的优化更好,学习率衰减更加合理一些。
需要注意的是:
AdaGrad 和 RMSProp 都是对于不同的参数分量使用不同的学习率,
如果某个参数分量的梯度值较大,则对应的学习率就会较小,
如果某个参数分量的梯度较小,则对应的学习率就会较大一些
6、Adam
Momentum (Adaptive Moment Estimation)使用指数加权平均计算当前的梯度值、AdaGrad、RMSProp 使用自适应的学习率,Adam 结合了 Momentum、RMSProp 的优点,
使用:移动加权平均的梯度和移动加权平均的学习率。
使得能够自适应学习率的同时,也能够使用 Momentum 的优点。
6.1、公式和步骤解释⭐
- 初始化:
- 学习率 α \alpha α
- 参数 θ \theta θ
- 一阶动量估计 m m m 初始化为0
- 二阶动量估计 v v v 初始化为0
- 小常数 ϵ \epsilon ϵ,防止除零错误,通常为 1 0 − 8 10^{-8} 10−8
- 一阶动量估计的衰减系数 β 1 \beta_1 β1,通常为0.9
- 二阶动量估计的衰减系数 β 2 \beta_2 β2,通常为0.999
- **计算梯度:**从训练集中采样 m m m 个样本的小批量,计算梯度 g g g
- 更新一阶动量估计: m t = β 1 m t − 1 + ( 1 − β 1 ) g t m_t = \beta_1 m_{t-1} + (1 - \beta_1)g_t mt=β1mt−1+(1−β1)gt
- 更新二阶动量估计: v t = β 2 v t − 1 + ( 1 − β 2 ) g t 2 v_t = \beta_2 v_{t-1} + (1 - \beta_2)g_t^2 vt=β2vt−1+(1−β2)gt2
- 计算一阶动量估计的偏差修正: m t ^ = m t 1 − β 1 t \hat{m_t} = \frac{m_t}{1 - \beta_1^t} mt^=1−β1tmt
- 计算二阶动量估计的偏差修正: v t ^ = v t 1 − β 2 t \hat{v_t} = \frac{v_t}{1 - \beta_2^t} vt^=1−β2tvt
- 更新参数: θ = θ − α m t ^ v t ^ + ϵ \theta = \theta - \alpha \frac{\hat{m_t}}{\sqrt{\hat{v_t}} + \epsilon} θ=θ−αvt^+ϵmt^
- 重复步骤2-7,直到满足停止条件(如迭代次数或误差足够小)
解释:
- 一阶动量估计 m t m_t mt:
- m t m_t mt 是梯度的指数加权平均。
- β 1 \beta_1 β1 是动量项的衰减率,接近1时动量项的影响较大。
- 二阶动量估计 v t v_t vt:
- v t v_t vt 是梯度平方的指数加权平均。
- β 2 \beta_2 β2 是RMSProp中的衰减率,控制过去梯度平方的影响。
- 偏差修正:
- 由于 m t m_t mt 和 v t v_t vt 在初始化时为0,前几步的估计值会有偏差。通过除以 ( 1 − β 1 t ) (1 - \beta_1^t) (1−β1t) 和 ( 1 − β 2 t ) (1 - \beta_2^t) (1−β2t) 对其进行修正。
- 参数更新:
- 使用修正后的动量估计和梯度平方估计更新参数。
- ϵ \epsilon ϵ 防止分母为零,提高数值稳定性。
这些步骤确保了Adam优化算法能够快速收敛,并且在不同问题和数据集上表现良好。
6.2、代码⭐
# -*- coding: utf-8 -*- # @Author: CSDN@逐梦苍穹 # @Time: 2024/7/29 2:43 import numpy as np import matplotlib.pyplot as plt # 初始化参数 theta = np.random.randn(2) # 假设我们有两个参数,随机初始化 alpha = 0.1 # 初始学习率 beta1 = 0.9 # 一阶动量估计的衰减系数 beta2 = 0.999 # 二阶动量估计的衰减系数 eps = 1e-8 # 防止除零的小常数 m = np.zeros_like(theta) # 初始化一阶动量估计 v = np.zeros_like(theta) # 初始化二阶动量估计 # 定义一个简单的二次损失函数 def loss_function(theta): return theta[0] ** 2 + theta[1] ** 2 # 损失函数:J(θ) = θ[0]^2 + θ[1]^2 # 计算梯度 def compute_gradient(theta): return 2 * theta # 梯度:∇J(θ) = [2*θ[0], 2*θ[1]] # 进行梯度下降迭代 iterations = 100 # 设定迭代次数 theta_history = [] # 存储每次迭代的theta值 loss_history = [] # 存储每次迭代的损失值 for t in range(1, iterations + 1): gradient = compute_gradient(theta) # 计算梯度 m = beta1 * m + (1 - beta1) * gradient # 更新一阶动量估计 m_t = β1 * m_{t-1} + (1 - β1) * g_t v = beta2 * v + (1 - beta2) * (gradient ** 2) # 更新二阶动量估计 v_t = β2 * v_{t-1} + (1 - β2) * g_t^2 m_hat = m / (1 - beta1 ** t) # 计算一阶动量估计的偏差修正 m_hat_t = m_t / (1 - β1^t) v_hat = v / (1 - beta2 ** t) # 计算二阶动量估计的偏差修正 v_hat_t = v_t / (1 - β2^t) theta -= alpha * m_hat / (np.sqrt(v_hat) + eps) # 更新参数 θ = θ - α * m_hat_t / (√v_hat_t + ε) # 记录参数和损失值以便后续绘图 theta_history.append(theta.copy()) # 记录当前theta值 loss_history.append(loss_function(theta)) # 记录当前损失值 print(f"Updated parameters: {theta}, Loss: {loss_function(theta)}") # 打印当前参数和损失值 print(f"Optimized parameters: {theta}") # 打印最终优化后的参数 # 绘制参数更新轨迹 theta_history = np.array(theta_history) # 将theta历史记录转换为NumPy数组 plt.figure(figsize=(12, 6)) # 创建一个12x6英寸的图形 plt.subplot(1, 2, 1) # 创建1行2列的子图,选择第一个子图 plt.plot(theta_history[:, 0], theta_history[:, 1], 'o-', markersize=4) # 绘制theta[0]和theta[1]的变化轨迹 plt.title('Parameter Update Path with Adam') # 设置子图标题 plt.xlabel('Theta[0]') # 设置x轴标签 plt.ylabel('Theta[1]') # 设置y轴标签 # 绘制损失函数值变化 plt.subplot(1, 2, 2) # 选择第二个子图 plt.plot(loss_history, 'r-') # 绘制损失值变化曲线,红色实线 plt.title('Loss Function Value with Adam') # 设置子图标题 plt.xlabel('Iteration') # 设置x轴标签 plt.ylabel('Loss') # 设置y轴标签 plt.tight_layout() # 自动调整子图布局 plt.show() # 显示图形 结果: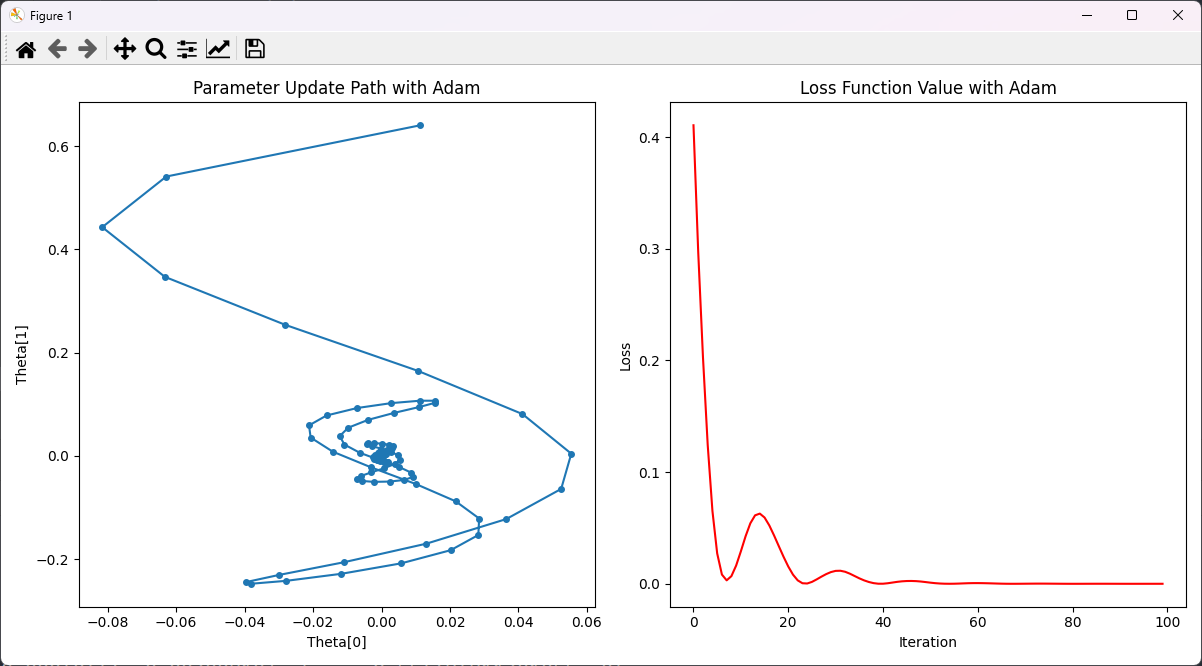
解释:
- 损失函数值在初始时较高,随着迭代次数的增加,损失值迅速下降。
- 在前几次迭代中,损失值下降速度非常快,这是因为Adam算法在初期阶段通过一阶和二阶动量的结合,使得参数更新步长较大。
- 随着迭代次数的增加,损失值逐渐趋于平稳,表明模型参数已接近最优值,优化过程收敛。
- 中间出现了几次小的波动,这可能是由于参数在接近局部最优值时调整的结果,但总体趋势是下降的。
6.3、优点
- 自适应学习率:Adam通过计算每个参数的自适应学习率,使得算法在训练过程中更加稳定。
- 动量加速:Adam使用动量估计(Momentum)来加速梯度下降,提高收敛速度。
- 偏差校正:Adam对一阶和二阶动量估计进行偏差校正,使得估计值更加准确。
- 适用于大规模数据和高维参数:Adam在处理大规模数据和高维参数时表现出色,特别适用于神经网络和深度学习模型的训练。
- 鲁棒性强:Adam对超参数的选择不敏感,通常默认的超参数设置(如 β1=0.9\beta_1 = 0.9β1=0.9,β2=0.999\beta_2 = 0.999β2=0.999)在多数情况下表现良好。
7、何为鞍点
这张图展示了一个典型的鞍点。鞍点在图的中心区域,表面在X轴方向上呈现凹陷,在Y轴方向上呈现上升,形成了一个鞍形。图中的蓝色箭头表示梯度下降的路径,可以看到这些路径在鞍点附近变慢和弯曲,表明梯度在鞍点处非常小,使得优化过程在该区域变得缓慢和不稳定。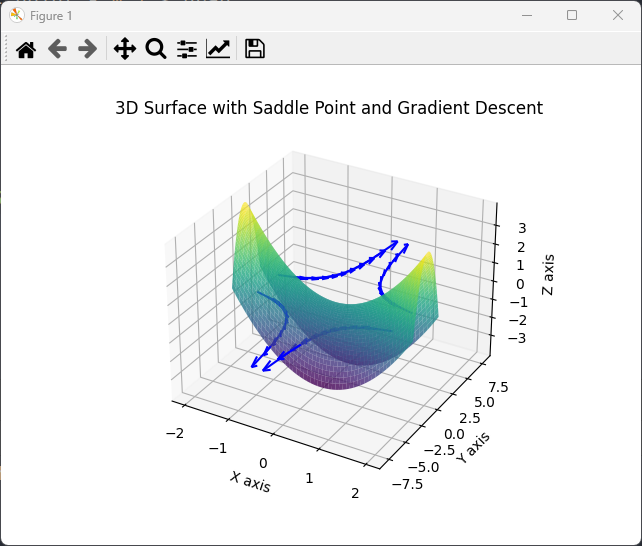
代码:
import numpy as np import matplotlib.pyplot as plt # 创建网格 x = np.linspace(-2, 2, 400) # 在-2到2之间生成400个等距点 y = np.linspace(-2, 2, 400) # 在-2到2之间生成400个等距点 X, Y = np.meshgrid(x, y) # 生成网格点 Z = X**2 - Y**2 # 定义鞍点函数 Z = X^2 - Y^2 # 绘制3D表面图 fig = plt.figure() # 创建一个新图形 ax = fig.add_subplot(111, projection='3d') # 添加一个3D子图 ax.plot_surface(X, Y, Z, cmap='viridis', alpha=0.8) # 绘制3D表面,使用'viridis'颜色映射,透明度为0.8 # 定义一个函数来绘制箭头表示梯度下降路径 def plot_arrow(ax, start, direction, length=0.2, color='r'): ax.quiver(start[0], start[1], start[2], # 箭头起点 direction[0], direction[1], direction[2], # 箭头方向 color=color, length=length, arrow_length_ratio=0.3) # 颜色、长度和箭头长度比例 # 梯度下降路径 start_points = [(-1.5, 1.5), (1.5, -1.5), (-1.5, -1.5), (1.5, 1.5)] # 定义四个起始点 for x0, y0 in start_points: # 遍历每个起始点 point = np.array([x0, y0, x0**2 - y0**2]) # 计算起始点的初始位置 for _ in range(10): # 模拟梯度下降的迭代 grad = np.array([2*point[0], -2*point[1], 0]) # 计算当前梯度 plot_arrow(ax, point, -grad, color='blue') # 绘制梯度下降路径的箭头 point = point - 0.1 * grad # 更新点位置,步长为0.1 # 设置轴标签和标题 ax.set_xlabel('X axis') ax.set_ylabel('Y axis') ax.set_zlabel('Z axis') ax.set_title('3D Surface with Saddle Point and Gradient Descent') # 显示图像 plt.show() # 显示绘制的图形 
8、小结
介绍常见的一些对普通梯度下降算法的优化方法,主要有 Momentum、AdaGrad、RMSProp、Adam 等优化方法。
其中 Momentum 使用指数加权平均参考了历史梯度,使得梯度值的变化更加平缓;
AdaGrad 则是针对学习率进行了自适应优化,由于其实现可能会导致学习率下降过快,RMSProp 对 AdaGrad 的学习率自适应计算方法进行了优化;
Adam 则是综合了 Momentum 和 RMSProp 的优点,在很多场景下,Adam 的表示都很不错
选择标准:
- 简单性:如果你需要快速实现一个优化算法,且对精度要求不高,可以选择最基本的梯度下降或者指数加权平均。
- 加速收敛:在需要快速收敛的场景下,Momentum和Adam是很好的选择。
- 自适应学习率:如果数据稀疏或维度较高,AdaGrad和RMSProp是不错的选择。
- 综合表现:在大多数情况下,Adam是最推荐的算法,因为它结合了自适应学习率和动量的优点,表现出色且对超参数不敏感。
建议:
- 在选择优化算法时,可以根据模型复杂度、数据特性和实验结果进行调试和选择。
- 初始尝试Adam,如果有特定需求或发现Adam表现不佳,再根据具体情况尝试其他优化算法。
