
阅读量:0
文章目录
🔥🔥🔥 在学习完mamba的基础原理后,可以阅读源码,加深理解。 Mamba复现与代码解读
Mamba的提出动机

最近非常火的语言模型都是Transformer模型。举几个例子,OpenAI的ChatGPT、谷歌的Gemini和GitHub的Copilot都是由Transformers驱动的。然而,transformer最大的问题是:它们都采用了注意力机制,而注意力随序列长度的二次增长。简单地说,对于快速交流(要求ChatGPT讲一个笑话),这个还好。但对于需要大量单词的查询(要求ChatGPT总结100页的文档),transformer的速度可能会慢得令人望而却步。Mamba就是致力于解决这个问题的。
Mamba比差不多大小的Transformer性能要更好,而且计算量和序列长度呈线性缩放。
Transformer
关于Transformer的介绍,具体可以看之前的一片博客:《详解注意力机制和Transformer》
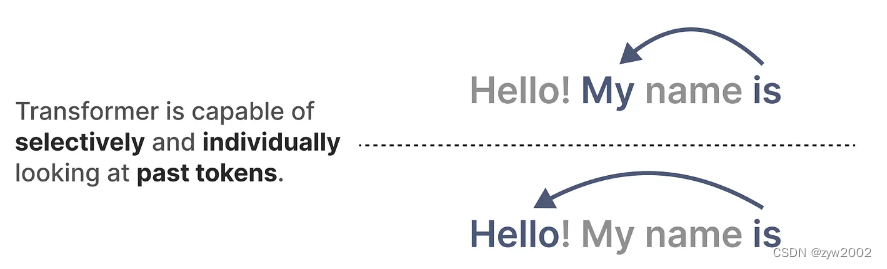
Transformer 把文本的输入看成一个包含多个单词(token)的序列(sequence) 。

Transforme的优点是:无论当前输入是什么,都可以回顾之前看到的所有Token。
Transformer主要包括两个结构,一个是编码器(encoder)用来编码文本输入,一个是解码器(decoder)用来生成输出。
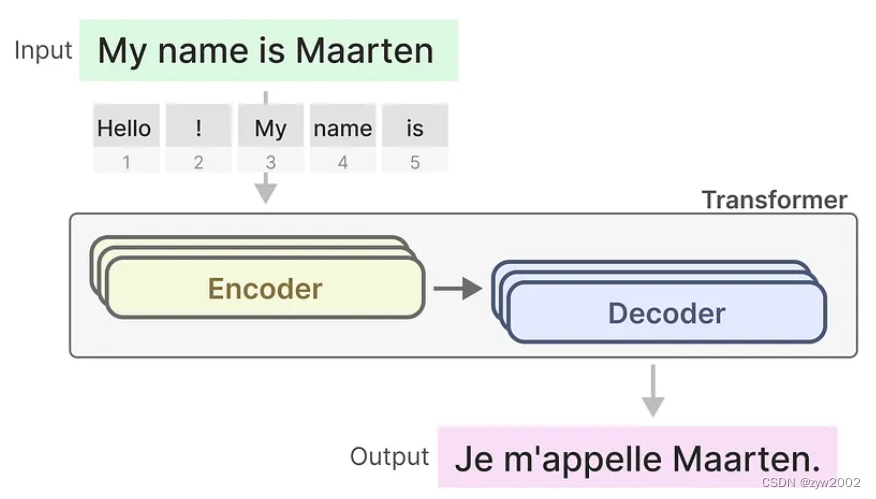
目前很火的生成式模型是只使用decoders结构,例如ChatGPT(Generative Pre-trained Transformers)
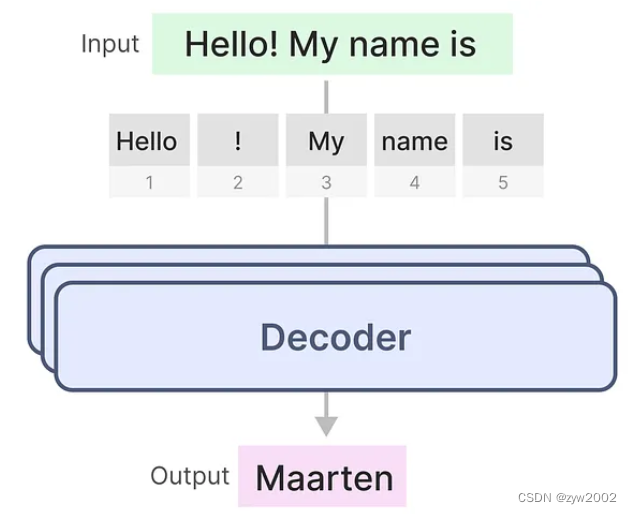
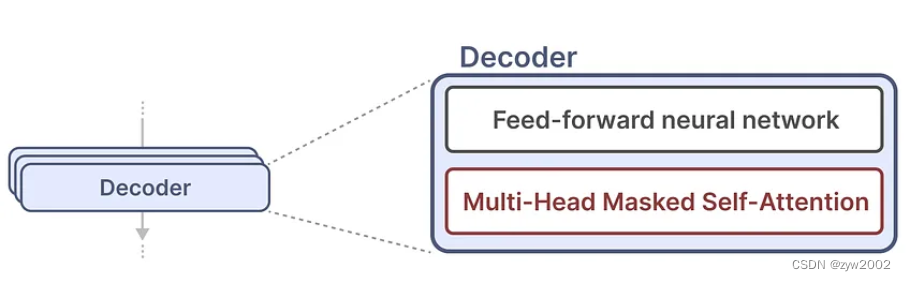
下面我们来看一个解码器的组成。Decoder是由一个masked self-attention和一个feed-forward neural network构成。
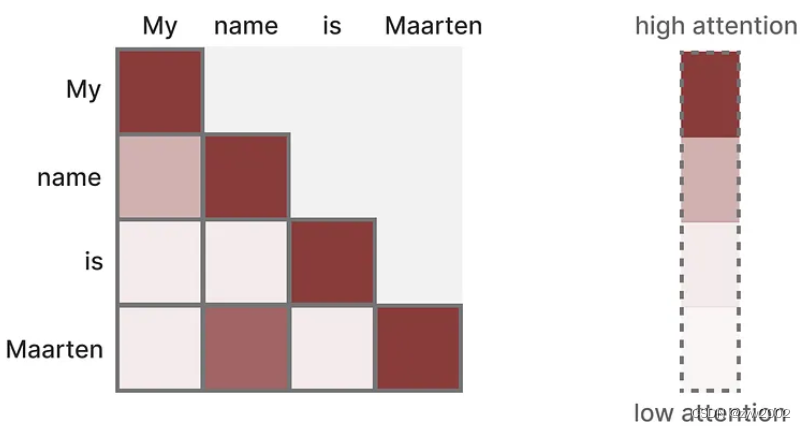
Self-attention 也是transformer的核心,它可以生成一个attention map 。attention map 是一个权重矩阵,用来存储每两个token之间相关性的大小。
在训练过程中,这个attention map的矩阵是可以并行生成的,因此可以加速训练。
⁉️ 为什么可以并行生成attention map呢?
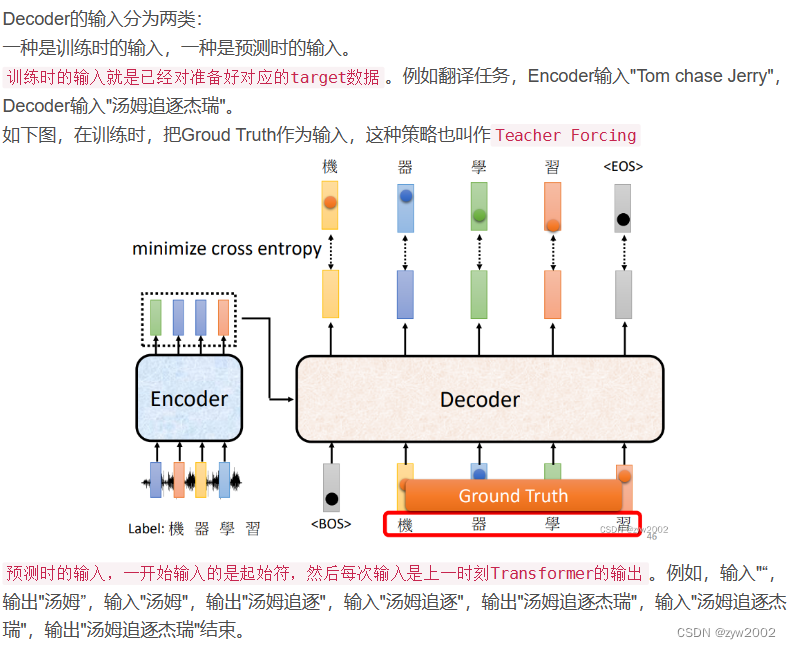
我们可以参考《详解注意力机制和Transformer》 中的这个例子。在训练时,我们是预先知道完整的输入序列的。但是在预测时,我们只能看到先前输出的token,而看不到后续的token。
✔️Transformer的优点: 可以看到之前所有的序列,而且在训练过程中可以并行化计算。
🔗 [b.1]中的原表达: It enables an uncompressed view of the entire sequence with fast training. 这里的 uncompress的意思是:transformer计算序列中所有的token两两之间的相关性的大小。假设输入的序列中包含 n n n个token, 得到的attention map的大小是 n × n n\times n n×n。
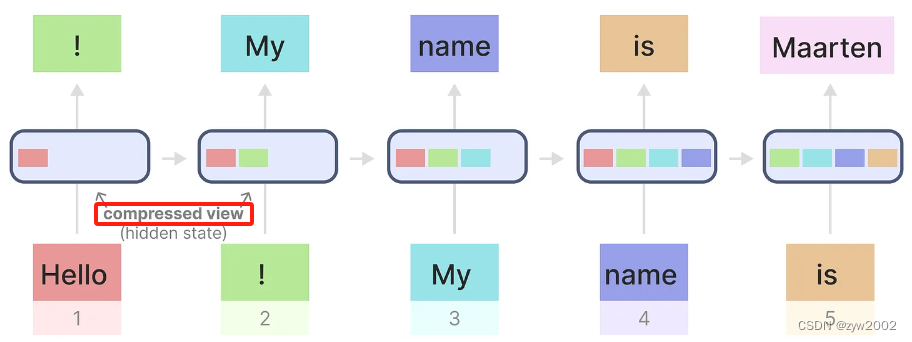
☕举个例子,当我们在生成“Marten”这个单词时,可以查看attention map中记录的“Marten”和所有其他token {“My”,“name”,“is”}的相关性大小。而对于下文将要介绍的RNN和S4,Mamba模型而言,它们对其他token提供的信息进行概括性的压缩。
❌ Transformer的缺点:在推理过程中,每生成一个新的token,都需要重新为整个序列计算一个新的attention map,导致推理性能很慢。对于一个长度为 L L L的序列,大约需要 L 2 L^2 L2的计算,如果序列长度增加,计算量会更大。
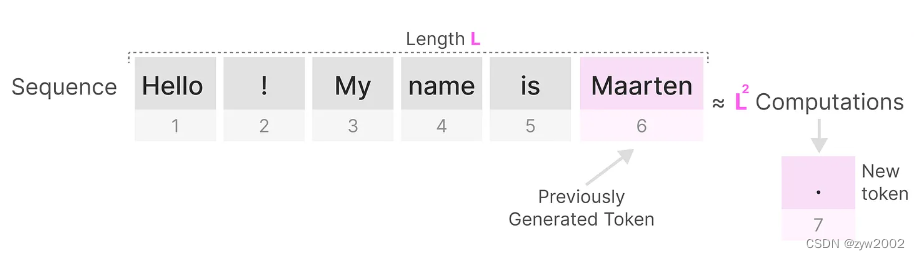
🔷 Transformer的性能总结:训练快,推理慢。
RNN
循环神经网络(RNN)是一种基于序列的网络。它在序列的每个时间步都需要两个输入,即时间步t的输入和前一个时间步t-1的隐藏状态,以生成下一个隐藏状态并预测输出。
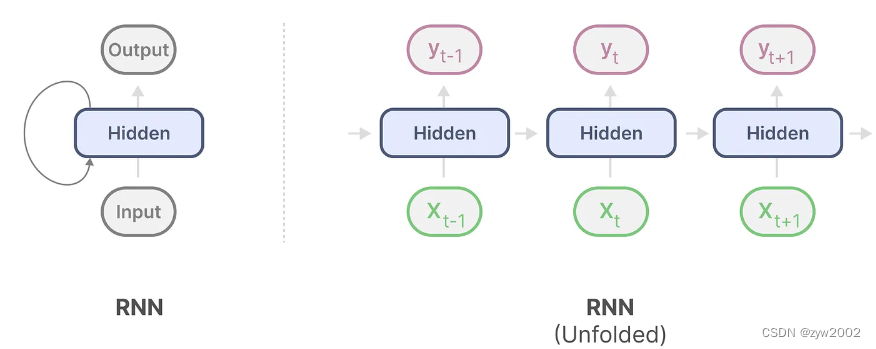
✔️RNN的优点:在生成当前的输出时,RNN只需要考虑当前的输入和上一时刻的隐藏状态。 和Transform相比,RNN不需要重新计算先前所有的隐藏状态。
换句话说,RNN可以快速进行推理,因为它的计算量与序列长度呈线性扩展。理论上,它甚至可以拥有无限长的上下文长度。
❌RNN的缺点:训练不能并行进行,因为它需要按照时间顺序地完成每个步骤。
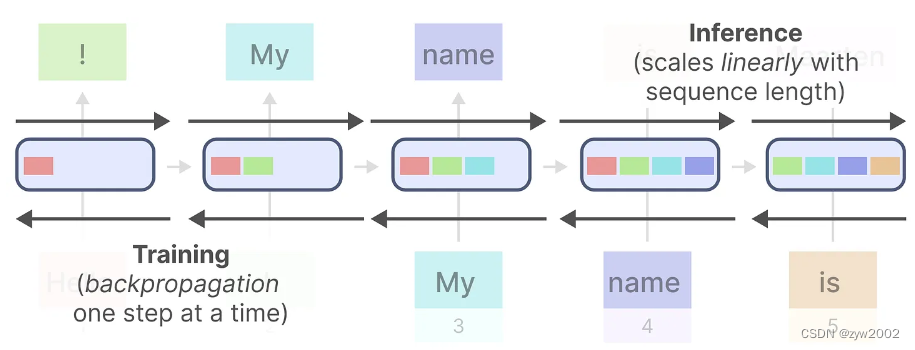
❓ 为什么RCNN不能并行训练: 在反向传播过程中,RNN需要计算每个时间步的梯度,并且这些梯度需要沿着时间步依次传播回去。如果同时更新所有时间步的参数,会导致梯度混乱和不稳定。因此不能并行训练
🔷 RNN的性能总结:训练慢,但是推理快 (和Transformer恰恰相反~)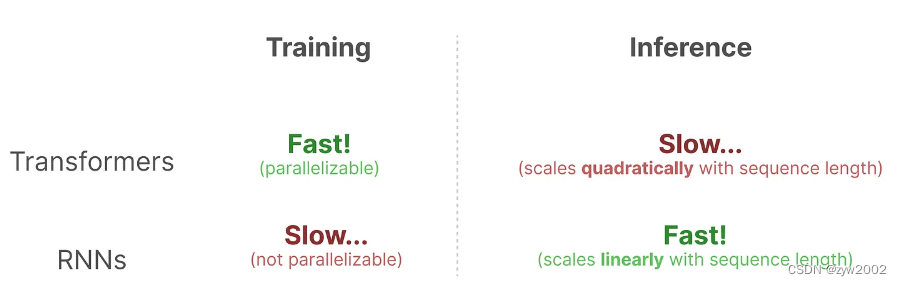
🐍: 我们能否以某种方式找到一种架构,既能像transformer一样并行训练,又能执行与序列长度线性扩展的推理? 这便是Mamba想要解决的问题。
Mama的提出背景
状态空间模型 (The State Space Model, SSM)
什么是状态空间 (State Space)?
☕举个例子,假如我们在走迷宫,那么状态空间(state space)就是我们在地图中所有可能的状态(states), 包含{ 我们正在哪里?下一步可以往哪个方向走走?下一步我们可能在哪里?}
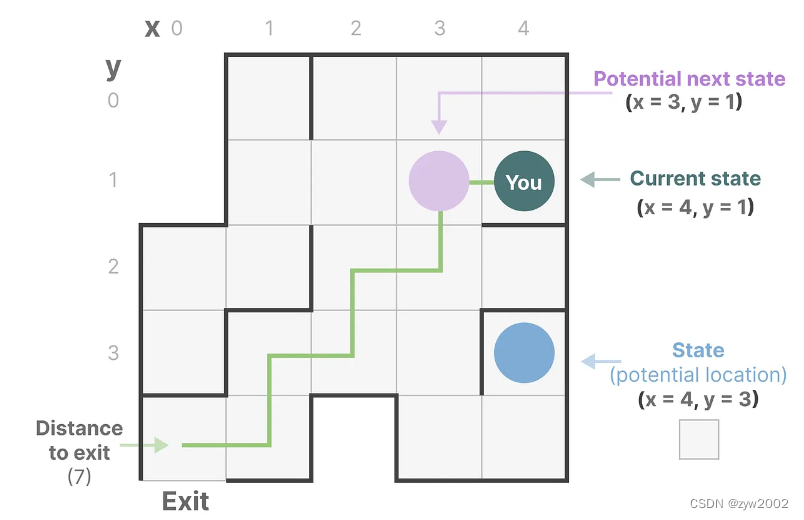
描述状态的变量,在我们的例子中是X和Y坐标,以及到出口的距离,可以表示为“状态向量”。
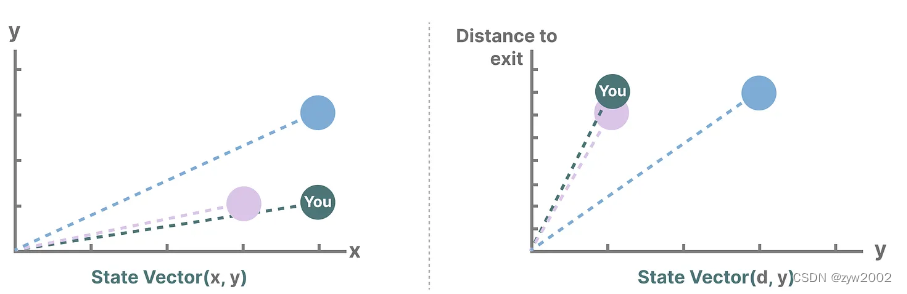
例如,当前的状态向量如下: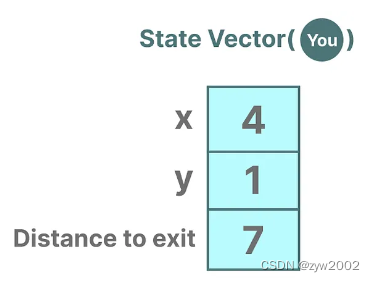
什么是状态空间模型(State Space Model, SSM)?
ssm是用于描述这些状态表示的模型,并根据某些输入预测其下一个状态可能是什么。
在时刻t, SSMs为:
- 映射输入序列
x(t)-(例如,在迷宫中向左和向下移动) - 到隐藏状态表示
h(t)-(例如,到出口的距离和x/y坐标) - 并推导出预测的输出序列
y(t)-(例如,再次向左移动以更快地到达出口)
然而,SSM不是使用离散序列(如向左移动一次),而是将连续序列作为输入,并预测输出序列。

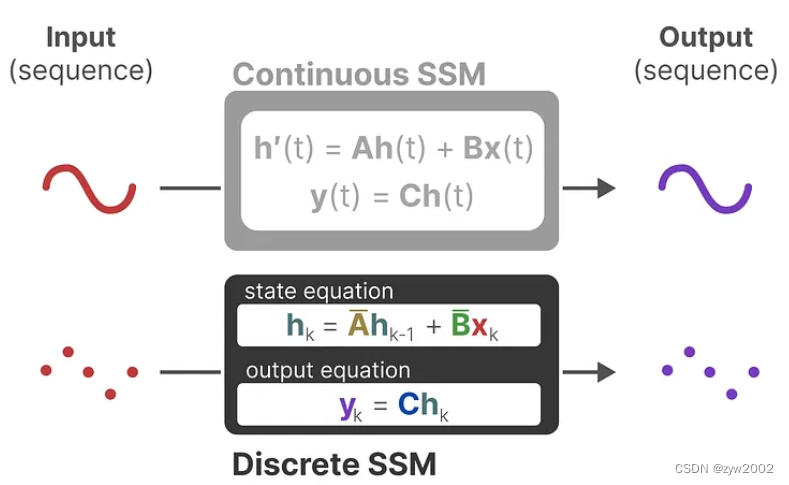
SSM假设动态系统,例如在3D空间中运动的物体,可以通过两个方程从其在时间 t t t的状态进行预测。
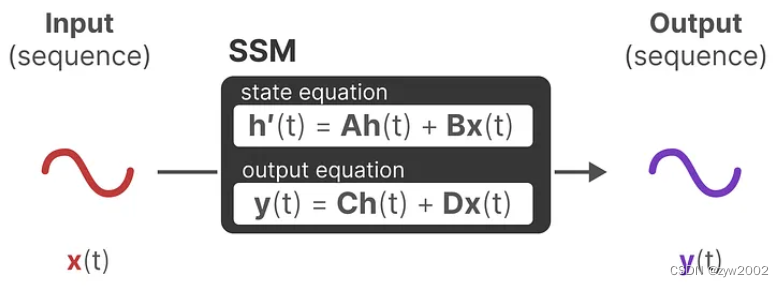
图解状态方程和输出方程
状态方程:
输出方程:
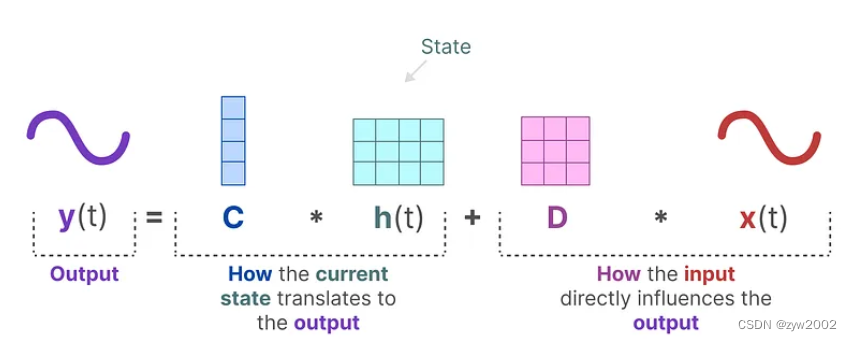
上述的A,B,C,D都是可学习的参数
将上述的两个方程整合在一起,得到了如下的结构:
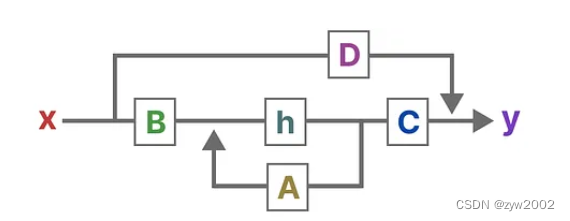
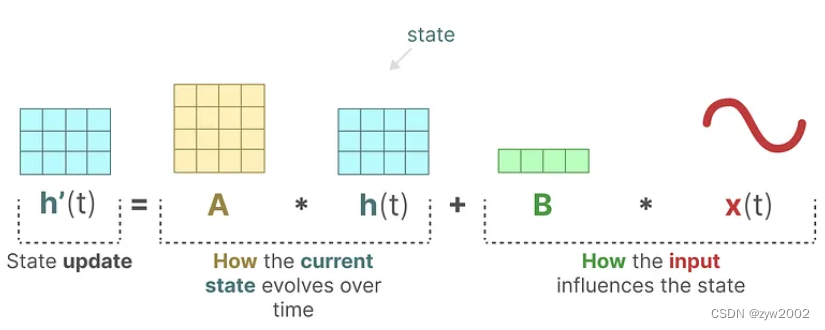
接下来,我们逐步理解这些矩阵是如何影响学习过程。
Step1: 假设我们有一些输入信号x(t),这个信号首先乘以矩阵B,矩阵B描述了输入如何影响系统。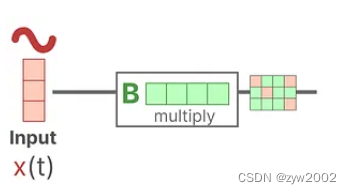
Step 2: 矩阵A和当前状态相乘。矩阵A描述了内部状态之间是如何连接的。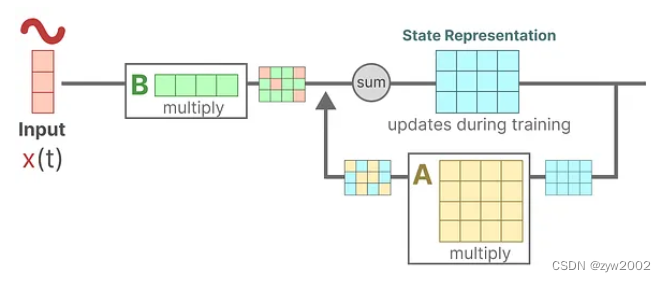
Step 3:矩阵C和新的状态相乘。矩阵C描述了状态是如何转化到输出的。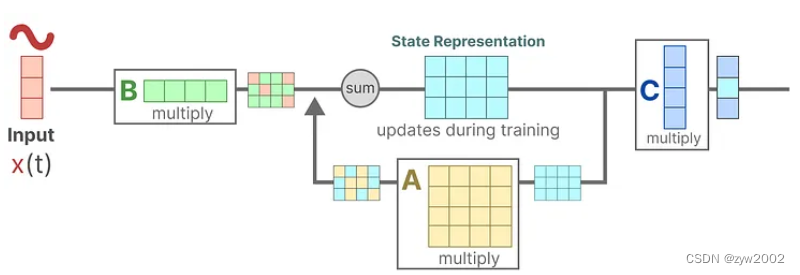
最后,我们可以利用矩阵D提供一个从输入到输出的直接信号。这通常也称为跳跃连接(skip-connection)。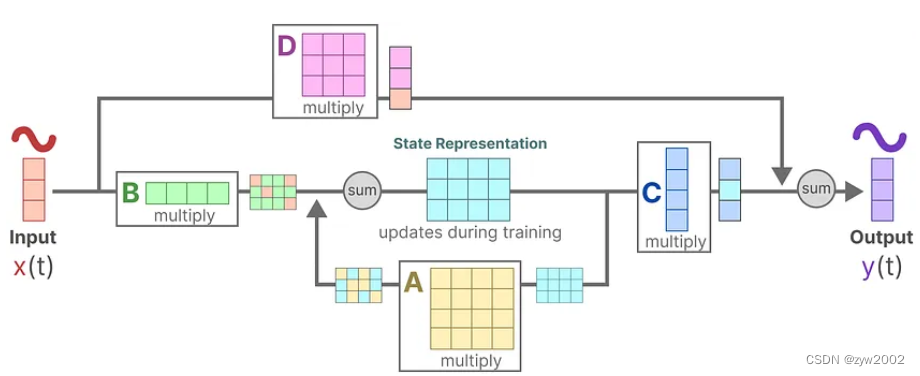
SSM通常被认为是不包含跳跃连接的部分。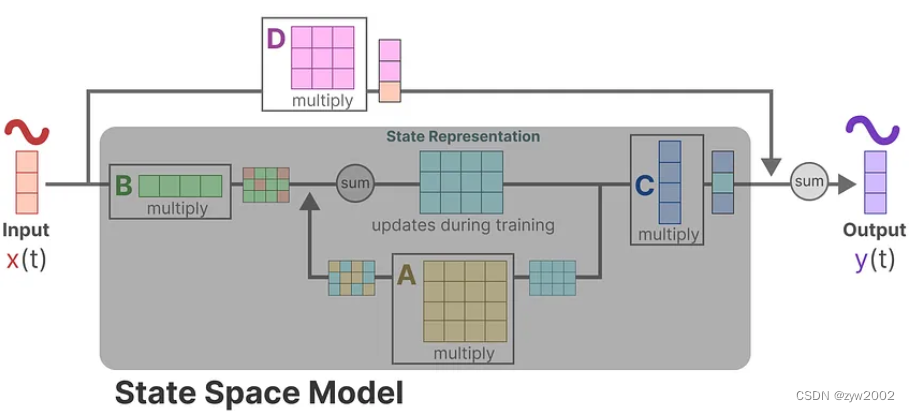
回到我们简化的视角,可以看出矩阵A、B和C是SSM的核心。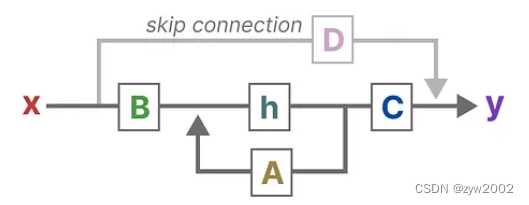
与此同时,可以将原来的两个方程进行新的可视化。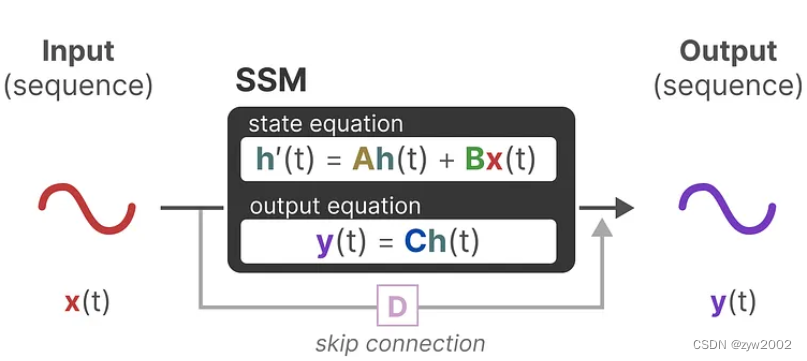
这两个方程旨在从观测数据中预测系统的状态。由于预期输入是连续的,所以SSM的主要表示是连续时间表示(continuous-time representation)。
线性状态空间层 (Linear State-Space Layer, LSSL)
LSSL[a.2]的核心思想是把连续时间的SSM进行离散化,得到两种离散化的表示(循环形式和卷积形式)
将连续的信号转化为离散的信号
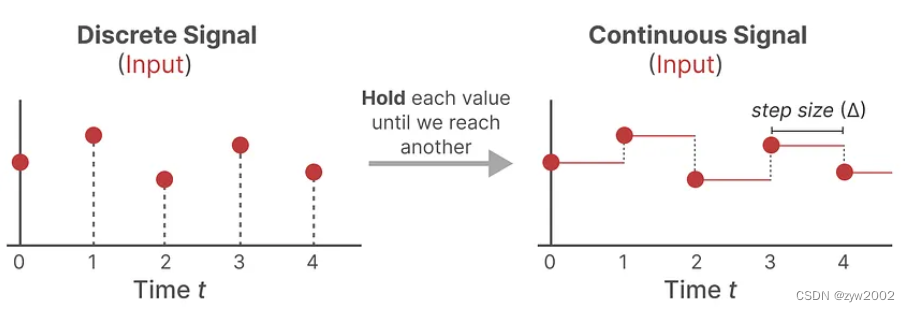
通常而言,我们的输入是离散的,例如一个文本序列。为了将离散的输入变成SSM可用的连续信号,我们使用零阶保持技术(Zero-order hold technique)。
零阶保持技术的原理:每次我们接收到一个离散信号时,我们都保持它的值,直到我们接收到一个新的离散信号。我们保存该值的时间由一个新的可学习参数表示,称为步长∆。
现在我们有了一个连续的信号作为输入,我们可以生成一个连续的输出,并且只根据输入的时间步长对值进行采样。这个采样的值就是我们离散化的输出。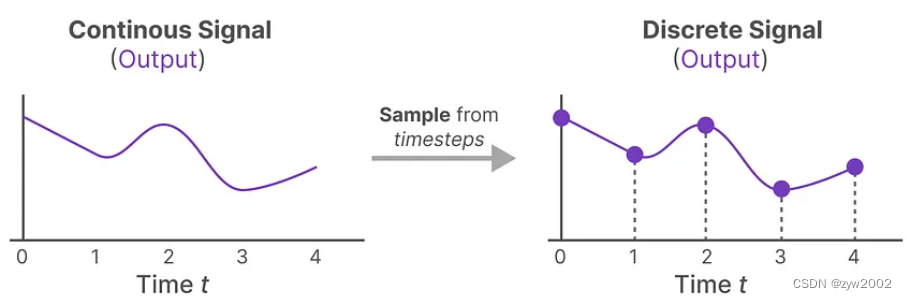
从数学的角度而言,我们可以按照如下的方式应用零阶保持技术
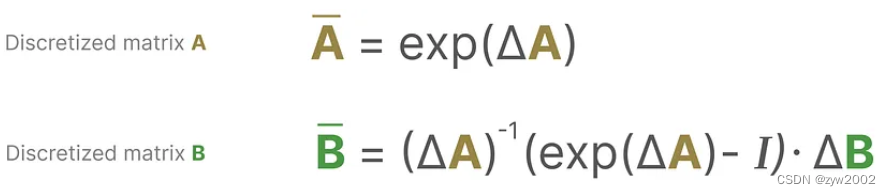
有几种有效的离散化方法,如欧拉方法、零阶保持器(Zero-order Hold, ZOH)方法或双线性方法。欧拉方法是最弱的,但在后两种方法之间的选择是微妙的。事实上,S4论文采用的是双线性方法,但Mamba使用的是ZOH。
我们从一个连续的SSM(函数到函数,x(t)→y(t))到一个离散SSM(序列到序列,xₖ→yₖ)。
接下来我们看一下离散化SSM的两种表示形式
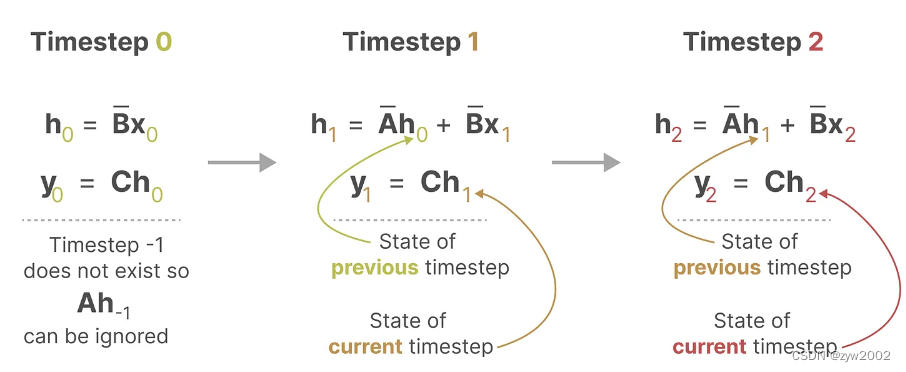
循环表示(Recurrent Representation)
在每个时间步长,我们计算当前输入(Bxₖ)如何影响前一个状态(Ahₖ₋₁),然后计算预测输出(Chₖ)。
离散SSM的展开表示
我们可以发现这种循环的SSM结构和RNN非常的类似。
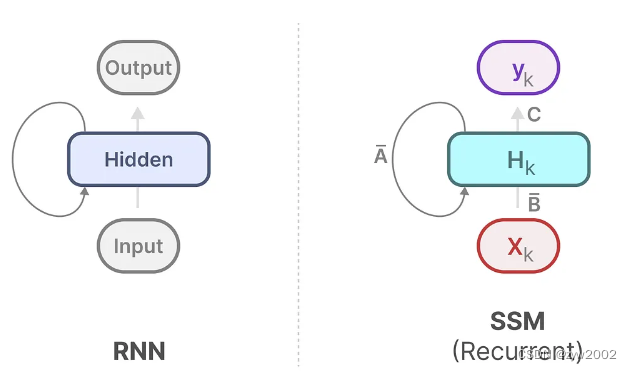
进一步的,我们将这种循环的SSM结构展开,进行可视化。
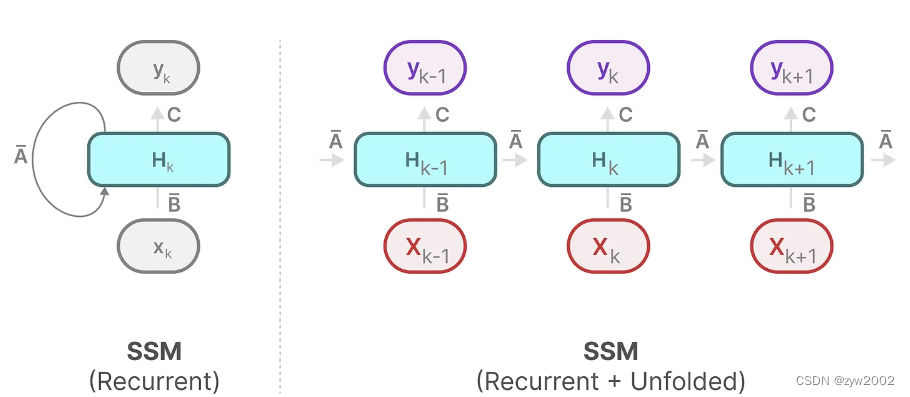
这使得我们可以将RNN的基本方法应用在离散的SSM上,但还需要考虑RNN推理快和训练慢的特性。
卷积表示(Convolution Representation)
在经典的图像识别任务中,我们使用卷积核来聚集特征。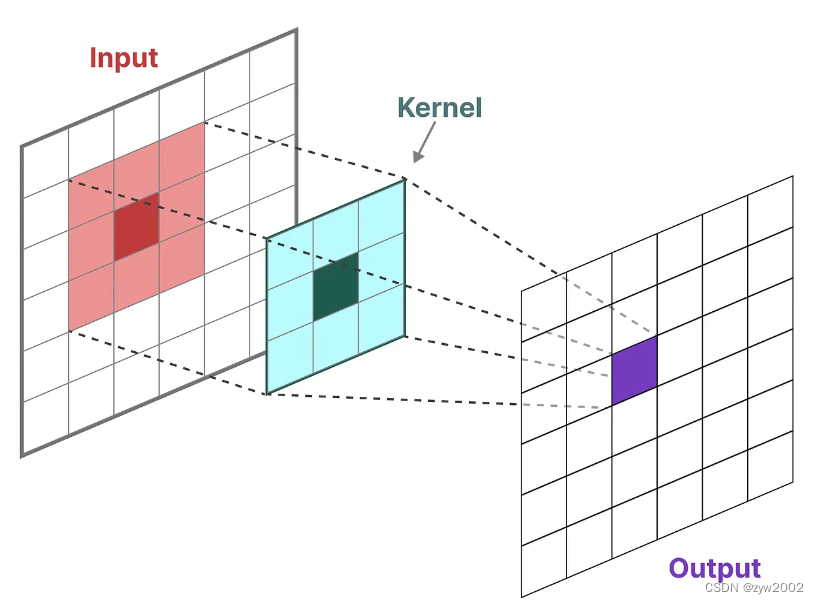
类似的,因为我们处理的是文本而不是图像,所以我们需要一维卷积: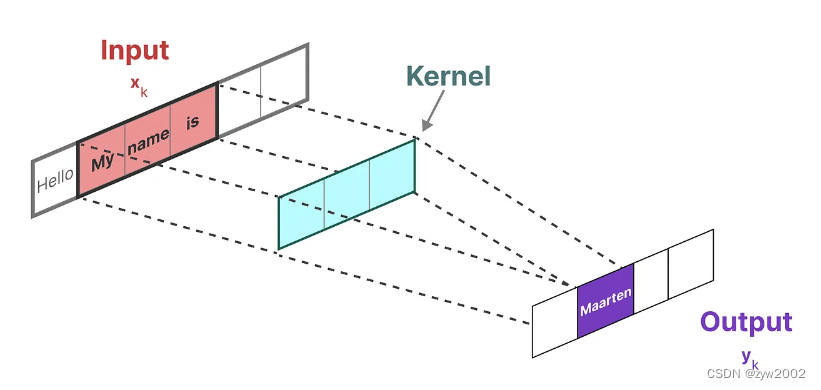
这个Kernel的具体表示如下: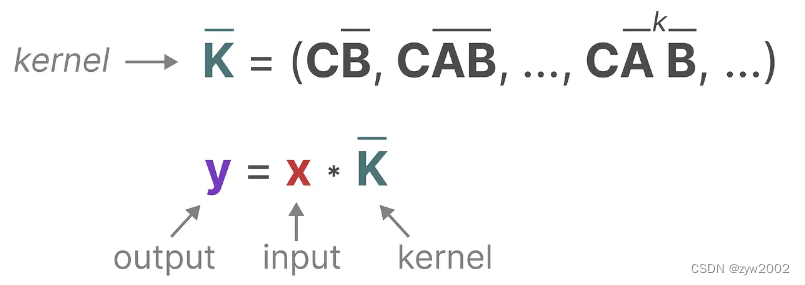
接下来,我们逐步看一下这个Kernel是如何工作的
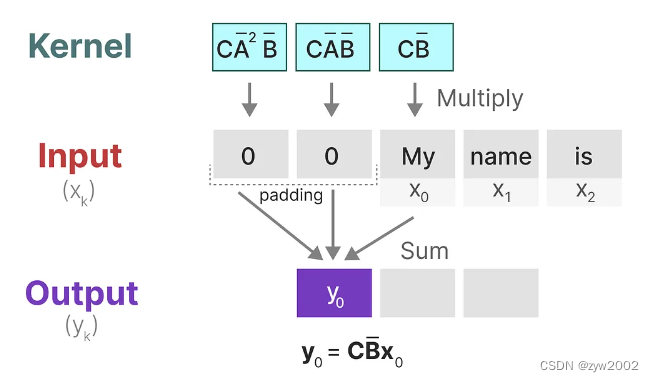

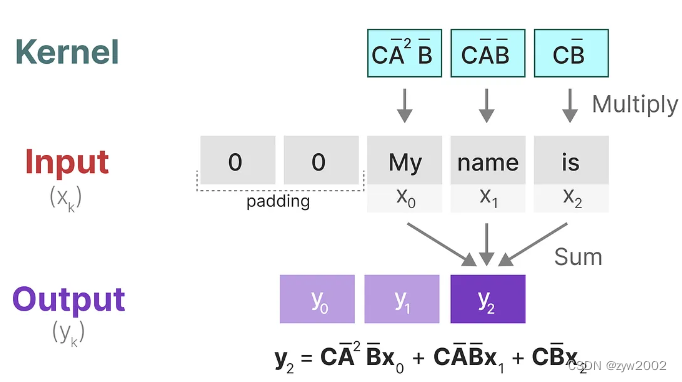
将SSM表示为卷积的一个主要好处是,它可以像卷积神经网络(CNN)一样并行训练。然而,由于核大小固定,它们的推理不像RNN那样快速。
LSSL的设计思路

有了这些表示,我们可以使用一个巧妙的技巧,即根据任务选择一种表示。在训练过程中,我们使用可以并行化的卷积表示,在推理过程中,我们使用高效的循环表示。这种混合表示就被称为LSSL。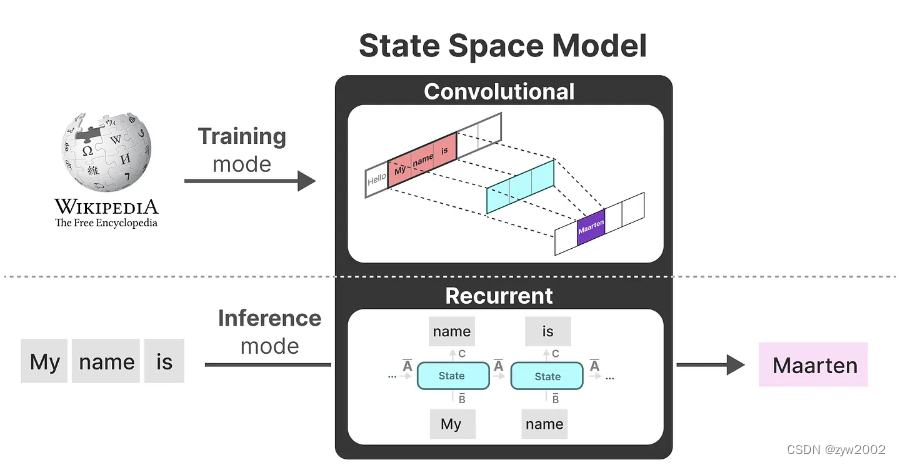
LSSL的一个重要特性是线性时间不变(Linear Time Invariance, LTI)
LTI声明SSM参数A、B和C对于所有时间步都是固定的。这意味着矩阵A、B和C对于SSM生成的每个token都是相同的。换句话说,无论你给SSM什么序列,A、B和C的值都保持不变。我们有一个不感知内容(not content-aware)的静态表示。
结构化序列空间模型 (Structured State Spaces for Sequences, S4)
Mamb的模型是基于S4模型构建的,所以我们先介绍下S4模型
S4是一个 线性时间不变的状态空间模型:linear time invariant (LTI) state space model (SSM)
矩阵A 捕获关于前一个状态的信息以构建新状态。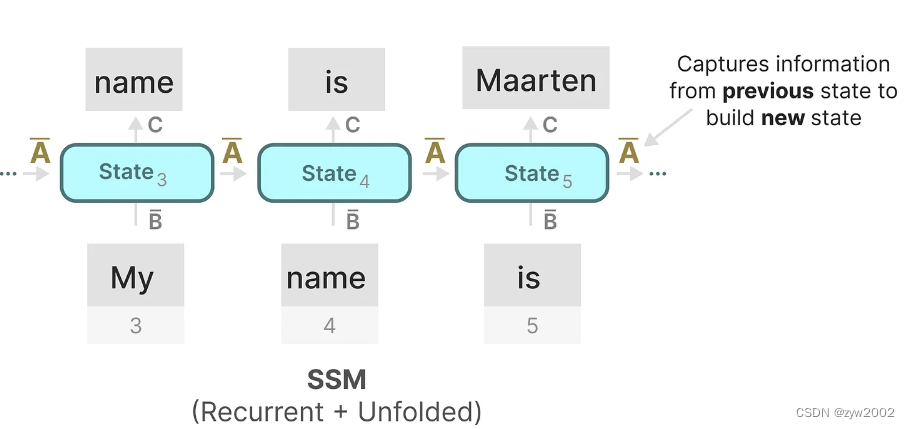
矩阵A本质上是用来产生隐藏状态的。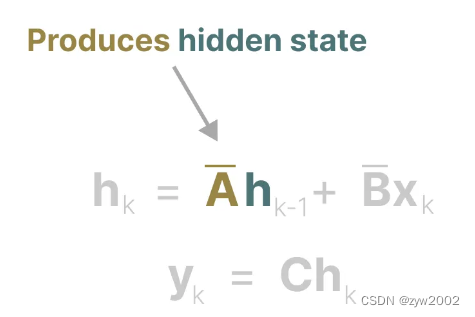
那么,我们应该如何创建矩阵A,使其可以保留更多的上下文信息呢?
这里使用的是High-order Polynomial Projection Operators (HiPPO) [a.3].
HiPPO试图将它迄今为止看到的所有输入信号压缩为一个系数向量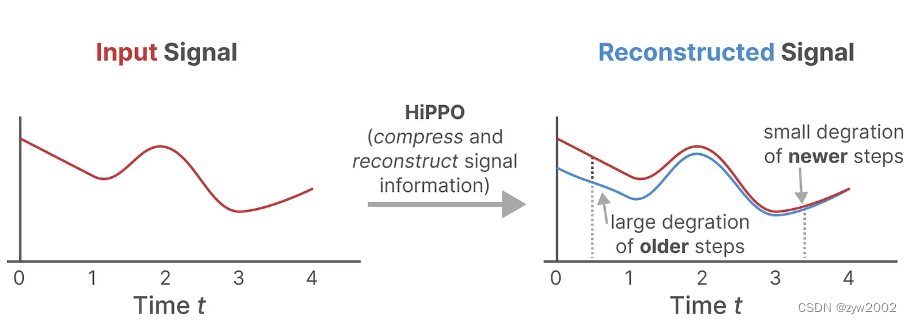
HiPPO使用矩阵A来构建状态表示,可以很好地捕获最近的token并衰减旧的token。其公式可以表示为: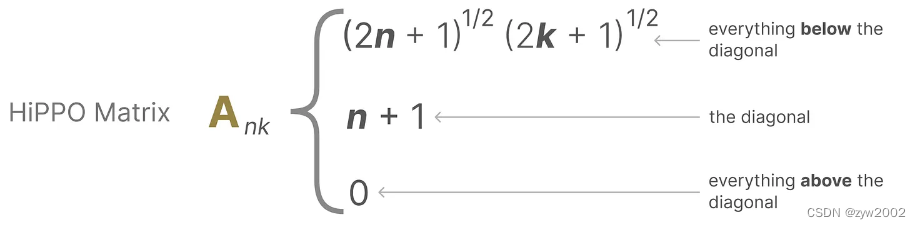
假设矩阵A的大小是 4 × 4 4\times 4 4×4, 那么它的HiPPO Matrix的表示如下: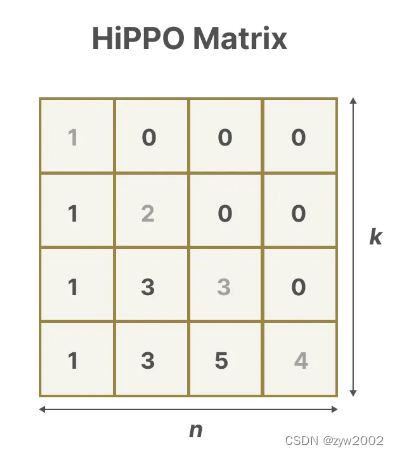
使用HiPPO构建矩阵A比初始化为随机矩阵要好得多。因此,与旧信号(初始token)相比,它可以更准确地重建较新的信号(最近的token)。
HiPPO矩阵背后的想法是,它产生一个隐藏状态来记忆其历史。
从数学的角度而言,它通过跟踪Legendre多项式[a.4]的系数来实现这一点,这使得它可以近似之前的所有历史。
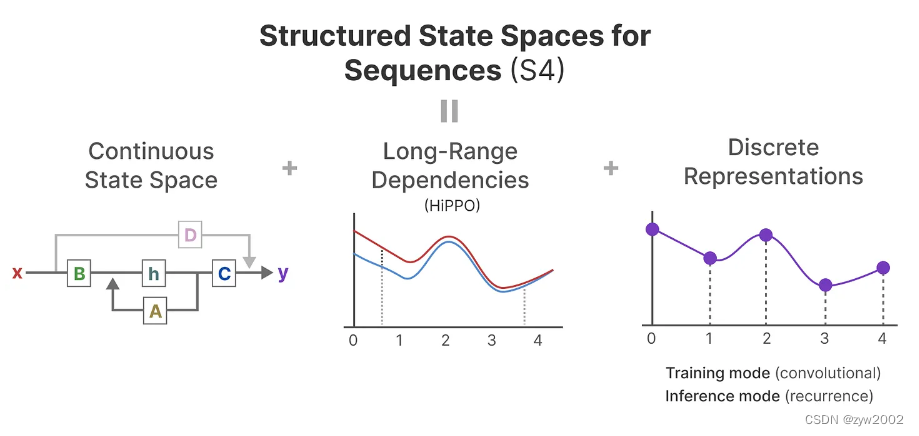
然后将HiPPO应用于我们之前看到的递归和卷积表示,以处理长程依赖关系。其结果是序列的结构化状态空间(Structured State Space for Sequences, S4),这是一类可以有效处理长序列的SSM。
S4主要包括以下三个部分:
- 状态空间模型
- HiPPO用于处理远程依赖
- 用于创建循环和卷积表示的离散化
Mamba的介绍
🐍 Mamba是一种状态空间模型(SSM)架构,它改进了S4架构。它有时也被称为S6或者selective SSM,它对S4进行了两项重要修改:
选择性扫描算法(selective scan algorithm),允许模型过滤相关或者不相关的信息硬件感知的算法(hardware-aware algorithm),允许通过并行扫描(parallel scan)、核融合(kernel fusion)和重计算(recomputation)有效地存储(中间)结果。
Mamba 要解决什么问题?
SSM和S4无法选择性的关注指定的输入(the ability to focus on or ignore particular inputs)。
下面,我们举两个例子来说明这个问题。
☕Example 1: Selective Copying Task
在选择性复制任务中,SSM的目标是复制输入的一部分并按顺序输出.
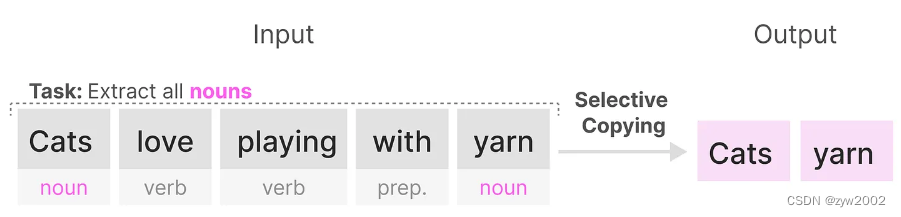
然而,(循环/卷积)SSM在这项任务中表现不佳,因为它是线性时间不变(Linear Time Invariant)的。正如我们之前看到的,矩阵A、B和C对于SSM生成的每个token都是相同的。
因此,SSM无法进行内容感知推理(content-aware reasoning),因为它将每个token视为固定的A、B和C矩阵的结果。这是一个问题,因为我们希望SSM对输入(提示)进行推理。
☕Example 2: Induction Heads
这个任务的目标是重现在输入中发现的模式。
本质上是在执行one-shot prompting,试图“教”模型在每个“Q:”之后提供一个“A:”响应。然而,由于ssm是时不变的,它无法选择从历史中回忆之前的哪个标记。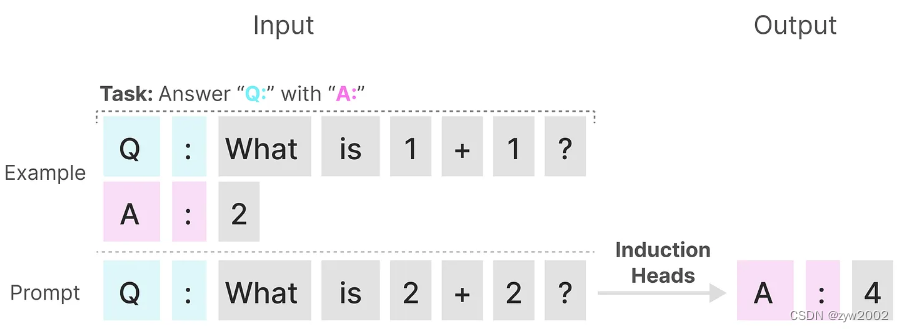
让我们以矩阵B为例来说明这一点。无论输入x是什么,矩阵B都是完全相同的,因此与x无关。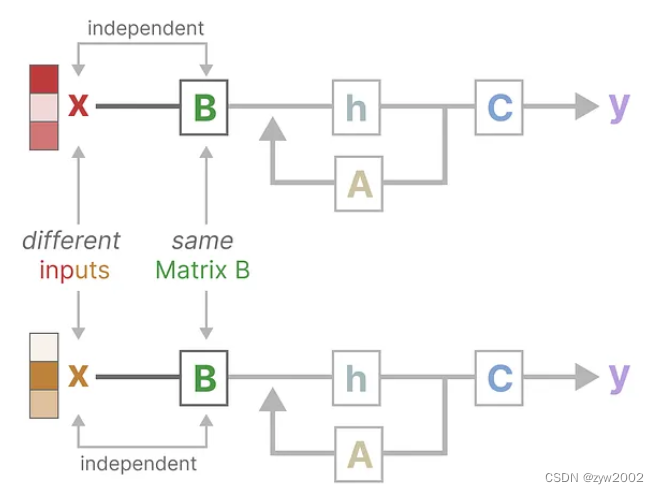
同样,无论输入是什么,A和C也保持固定。这表明了我们迄今为止看到的SSM都是静态的。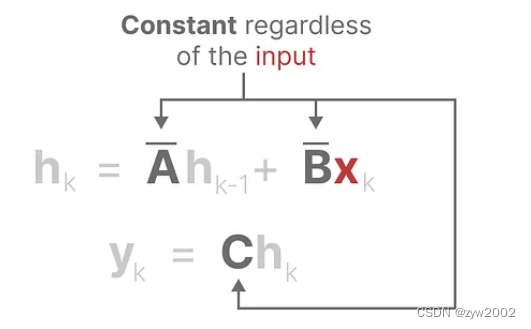
相比之下,这些任务对transformer来说相对容易,因为它们根据输入序列动态改变注意力。他们可以选择性地“看”或“关注”序列的不同部分。
SSM在这些任务上的糟糕表现说明了time-invariant SSM的潜在问题,矩阵A、B和C的静态性质导致了其无法进行内容感知(content-awareness)。
Mamba的特性一: 选择性的保留信息(Selective Retain Information)
SSM的循环表示创建了一个非常高效(more efficient)的小状态,因为它压缩了整个历史状态。然而,与没有压缩历史状态(通过attention map)的Transformer模型相比,它的性能要差的多(less powerful)。
Mamba 致力于保留一个小的且有用的状态信息, 兼顾性能和效率。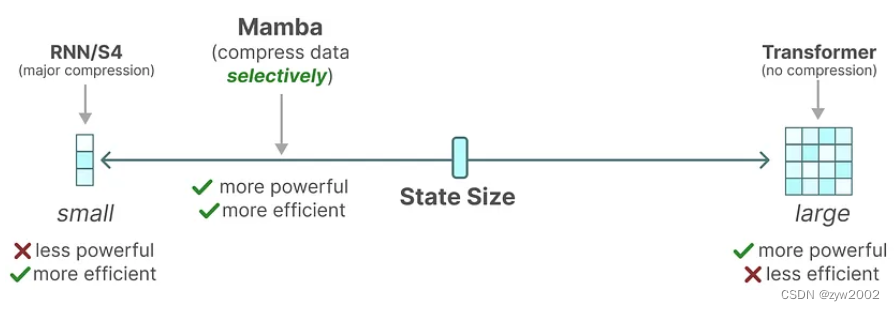
如上所述,它通过有选择地将数据压缩到状态中来实现这一点。(当有一个输入句子时,通常会有一些信息,比如标点,没有太多意义。这些无意义的信息就可以被忽略掉。)
为了有选择地压缩信息,我们需要参数依赖于输入。
为此,让我们首先探究下在训练过程中SSM的输入和输出维度:
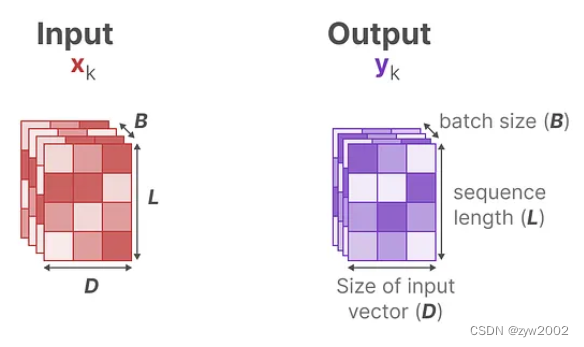
在结构化状态空间模型(S4)中,矩阵A、B和C与输入无关,因为它们的维数N和D是静态的,不会改变。
相反,Mamba通过合并输入的序列长度和批次大小,使矩阵B和C,甚至步长∆依赖于输入: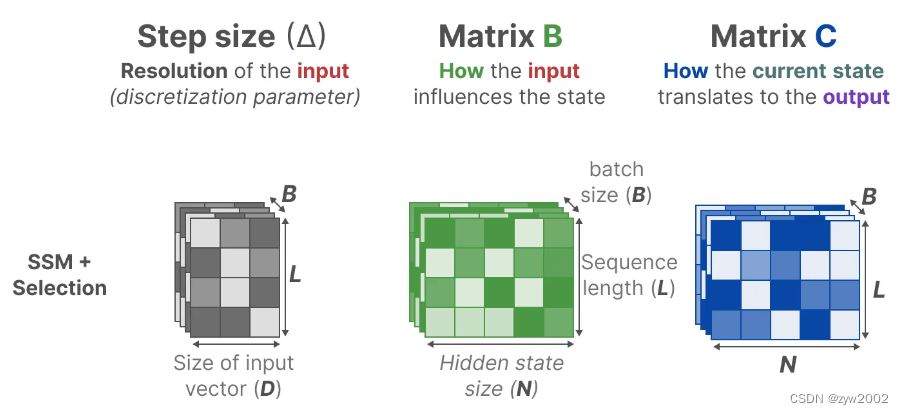
这意味着对于每个输入标记,我们现在有不同的B和C矩阵,这解决了内容感知的问题。这样就可以依赖于输入,选择什么保持在隐藏状态,什么要忽略。
注意:矩阵A保持不变,因为我们希望状态本身保持静态,但它被影响的方式(通过B和C)是动态的。
更小的步长∆导致忽略特定的单词,而更多地使用前一个上下文,而更大的步长∆则更多地关注输入单词而不是上下文: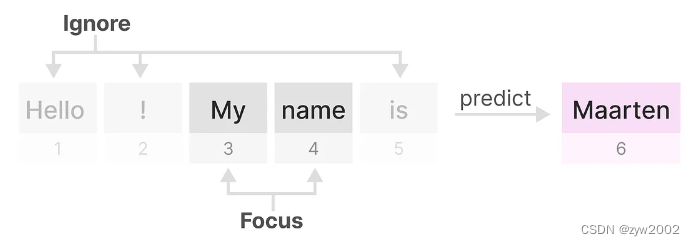
更进一步解释:当步长较小(即∆较小)时,模型更倾向于忽略特定的单词,而更多地依赖前一个上下文。这意味着模型更注重前面的单词对当前单词的影响,而忽略了较远距离的单词。
相反,当步长较大(即∆较大)时,模型更多地关注当前输入单词而不是上下文。这意味着模型更多地考虑当前输入单词对上下文的影响,而不是依赖于前一个上下文来决定当前单词的特征。
Mamba的特性二: 扫描操作(The Scan Operation)
上述的选择性保留信息也带来了一些问题:由于这些矩阵(B,C,∆)现在是动态的,它们不能使用卷积表示进行计算,因为它假设一个固定的核。我们只能使用递归表示,而失去了卷积提供的并行化。
为了实现并行化,让我们先来看看如何使用递归计算输出: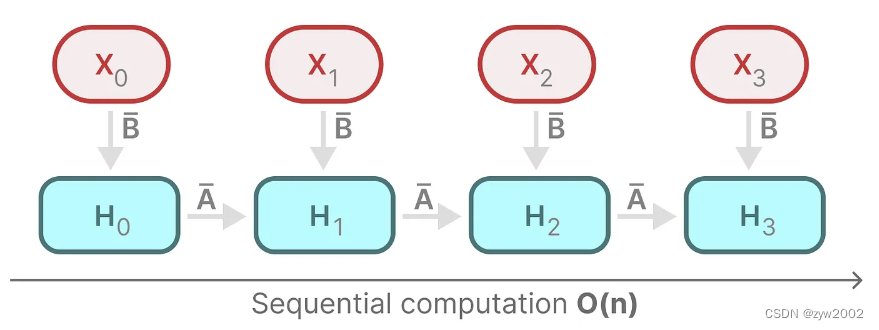
每个状态是前一个状态(乘以A)加上当前输入(乘以B)的和。这称为扫描操作,可以用for循环轻松计算。相比之下,并行化似乎是不可能的,因为只有在我们拥有前一个状态的情况下,每个状态才能计算出来。然而,Mamba通过并行扫描算法使这成为可能。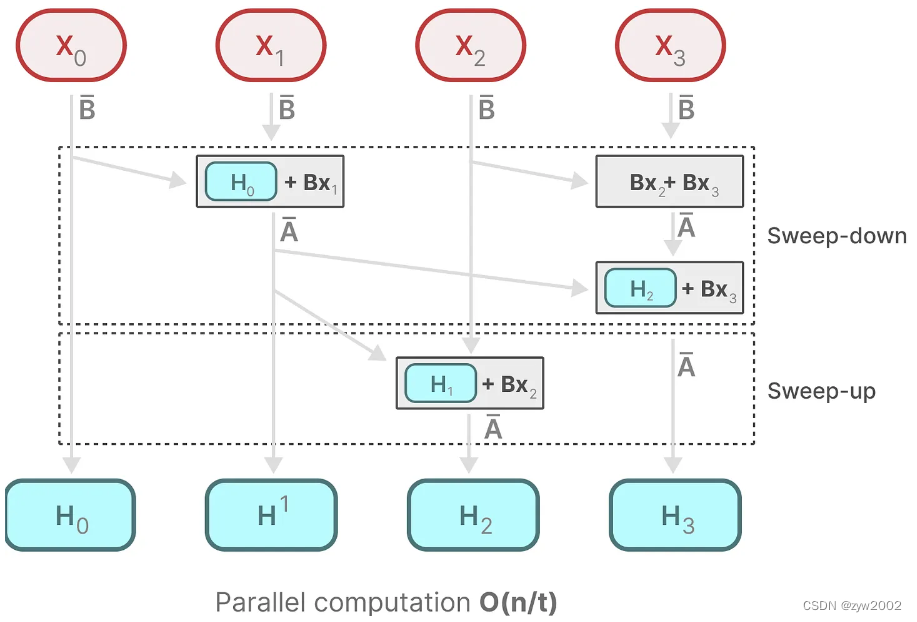
Mamba的特性三:硬件感知算法 (Hardware-aware Algorithm)
GPU的一个缺点是它们在小型但高效的SRAM和大型但略低效率的DRAM之间的传输(IO)速度有限。频繁地在SRAM和DRAM之间复制信息成为瓶颈。
与Flash Attention一样,Mamba试图限制从DRAM切换到SRAM的次数,反之亦然。它通过核融合来实现这一点,核融合允许模型防止写入中间结果,并持续执行计算,直到完成。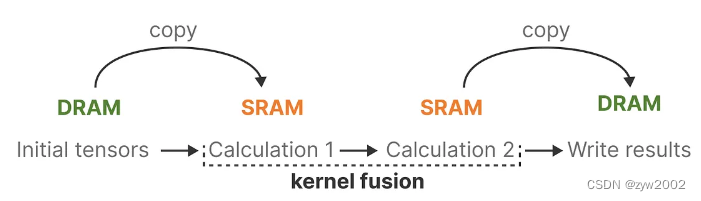
我们可以通过可视化Mamba的基本架构来查看DRAM和SRAM分配的具体实例: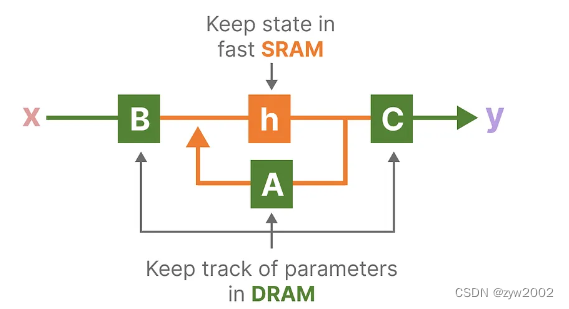
这里将下列代码融合到一个内核中:
- 用∆离散化步长
- 选择性扫描算法
- 与C相乘
硬件感知算法的最后一部分是重计算 (recomputation)。
中间状态不保存,但对于反向传递计算梯度是必要的。相反,作者在反向传递期间重新计算这些中间状态。虽然这看起来效率不高,但与从相对较慢的DRAM读取所有中间状态相比,它的开销要小得多。
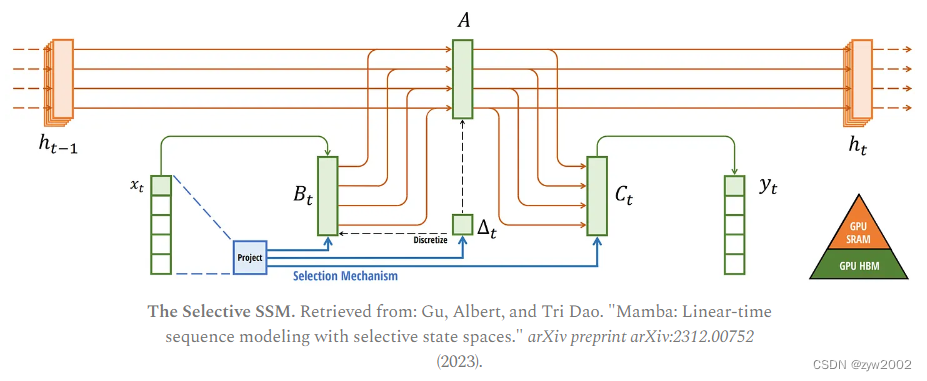
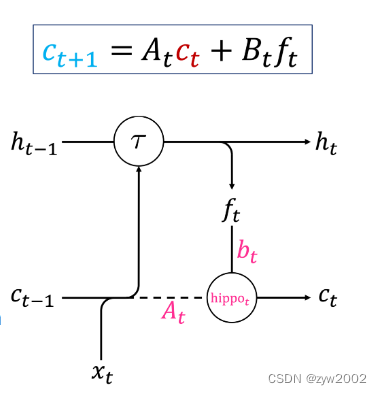
我们现在已经介绍了其架构的所有组件,下图是Mamba的Overview
- 首先,输入Xt通过选择性机制映射得到Bt,∆,Ct
- 然后使用∆,用零阶保持技术对A和Bt进行离散化
- 离散化后的B和输入Xt相乘,离散化后的A和原始状态 h t − 1 h_{t-1} ht−1相乘,将这两项相加得到新的状态 h t h_t ht。
- 新状态和Ct相乘,得到输出 y t y_t yt
Mamba基础块的设计(Mamba Block)
在Transformer中,用Decoder block来实现self-attention。与此类似,在Mamba中,也使用Mamba Block 来实现 selective SSM。
和解码器一样,我们可以将多个Mamba块堆叠起来,并将它们的输出作为下一个Mamba块的输入: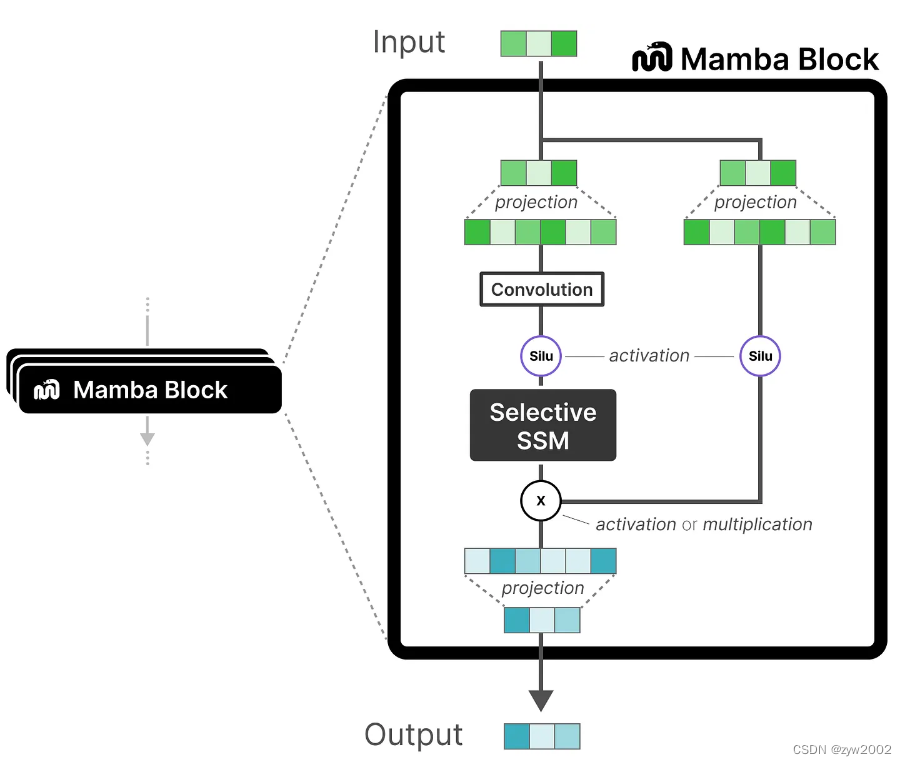
它首先用一个线性投影(linear projection)得到我们的输入嵌入(input embedding)。然后,在应用选择性SSM之前进行卷积,以防止独立token计算。
选择性SSM具有以下属性:
- 通过离散化创建循环SSM
- 在矩阵A上进行HiPPO初始化以捕获长程依赖关系
- 选择性扫描算法选择性地压缩信息
- 硬件感知算法加速计算
在查看代码实现时,我们可以进一步扩展此架构,并探索端到端的示例。变化包含normalization layers和用于选择输出标记的softmax。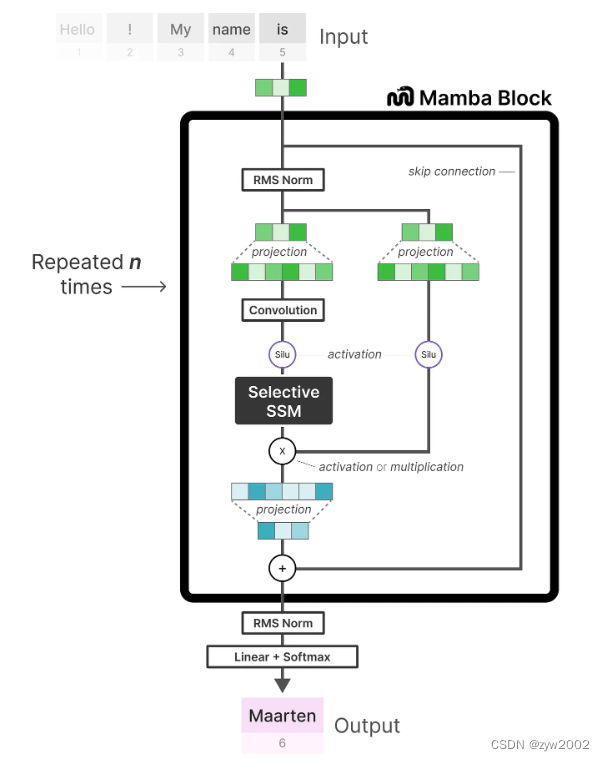
总结:Mamba 即可以进行并行化训练,也可以按照线性缩放的复杂度进行推理,同时可以处理无限的上下文信息。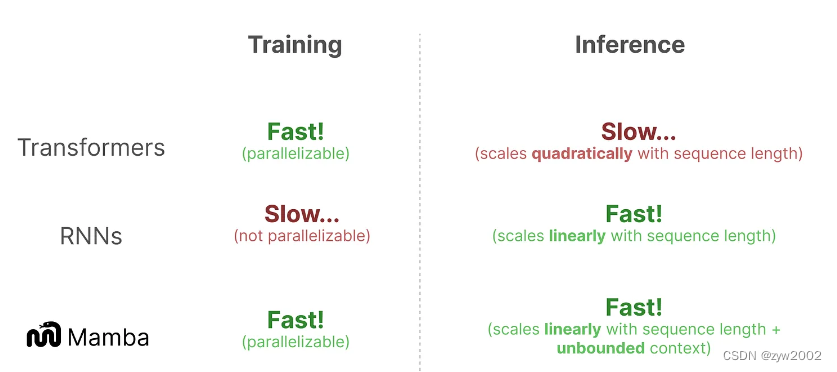
补充介绍
接下来,我们从数学公式的角度,更深入的了解上文中涉及的一些技术细节。
连续状态空间模型(SSM)定义了一个从输入信号(时间t的函数) u ( t ) ∈ R M u(t)\in R^M u(t)∈RM到输出信号 y ( t ) ∈ R M y(t)\in R^M y(t)∈RM通过一个潜在状态 x ( t ) ∈ R N x(t)\in R^N x(t)∈RN的线性映射:

式中 A ( t ) ∈ R N × N , B ( t ) ∈ R N × M , C ( t ) ∈ R M × N A(t)∈R^{N×N},B(t)∈R^{N×M},C(t)∈R^{M×N} A(t)∈RN×N,B(t)∈RN×M,C(t)∈RM×N。这些通常也被称为状态矩阵、输入矩阵和输出矩阵。
离散化方法
为了将连续的SSM变成离散的SSM,可以采用多种离散化的方法。
欧拉模型(Euler’s method) 是最简单的一种离散化方法。
把 x ′ ( t ) = f ( x ( t ) ) x'(t)=f(x(t)) x′(t)=f(x(t))转换成一阶近似的形式: x k = x k − 1 + ∆ f ( x k − 1 ) x_k=x_{k-1}+∆f(x_{k-1}) xk=xk−1+∆f(xk−1), 其中x表示状态,f表示状态转换函数。
然后将上式代入到(2.1a)中,可以得到: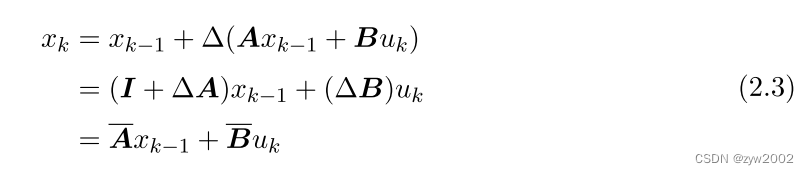
这样我们就可以得到了离散化的状态参数:
然而,欧拉方法可以是不稳定。还有更精确的方法,如零阶保持(Zero-order Hold,ZOH)或双线性变换(bilinear transform, 也称为Tustin的方法)。
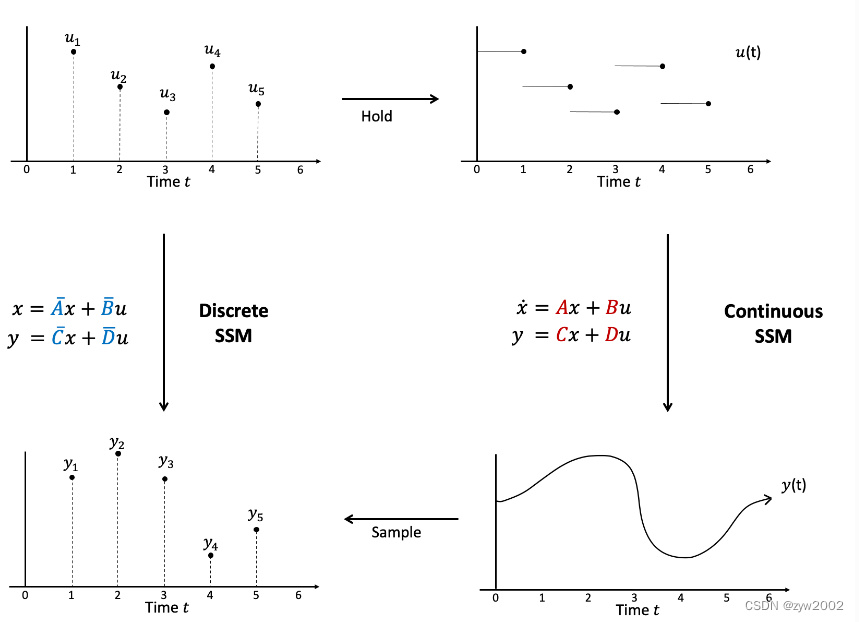
最后,我们再来总结下离散和连续的SSM
- 首先,得到离散的输入(左上图)
- 然后,通过离散化技术(例如零阶保持)得到连续的输入(右上图)
- 接着,输入到连续的SSM中,得到连续的输出(右下)
- 最后,对连续的输出进行采样,得到离散的输出(左下)
SSM的卷积表示推导
我们把SSM的状态推导公式展开:
然后发现规律,得到 y k y_k yk
进一步的,我们可以用卷积核的形式来描述上式
详细介绍HiPPO
建模长期和复杂的时间依赖关系的基本问题:记忆存储和合并来自以前时间步骤的信息。
然而,流行的机器学习模型很容易遗忘:它们要么是用固定大小的上下文窗口(例如注意力)构建的,要么是启发式机制,根据经验,它们受到记忆范围有限的影响(例如,由于"梯度消失")。
HiPPO Framework (High-Order Polynomial Projection Operator)
问题定义:给定任意一个输入函数 f ( t ) f(t) f(t),寻找一个coefficient vectors c ( t ) c(t) c(t), 它用来压缩所有的历史记忆。
一个很直接的方法 就是用多项式去拟合 f ( t ) f(t) f(t),随着时间的推移我们需要不断的更新多项式的系数。
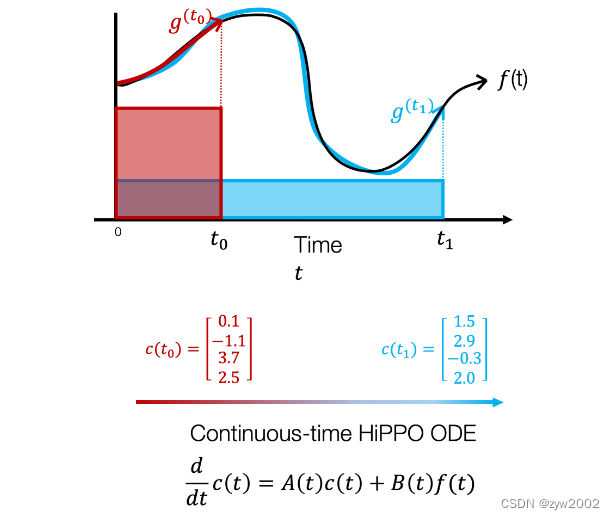
简而言之,HiPPO框架采用一组measure,并给出一个带有封闭形式转移矩阵的方程,这些矩阵为A(t),B(t)。这些矩阵依赖于measure,根据这些动态找到系数c(t),这些系数最佳地近似了f(t)的历史。
☕ 下面,我们举两个measure的实例来进一步的解释HiPPO
左图(Translated Legendre measure)采用了固定长度的滑动窗口,换句话说,它关注最近的历史信息。
右图 (scaled Legendre measure)将整个历史均匀加权到当前时间。
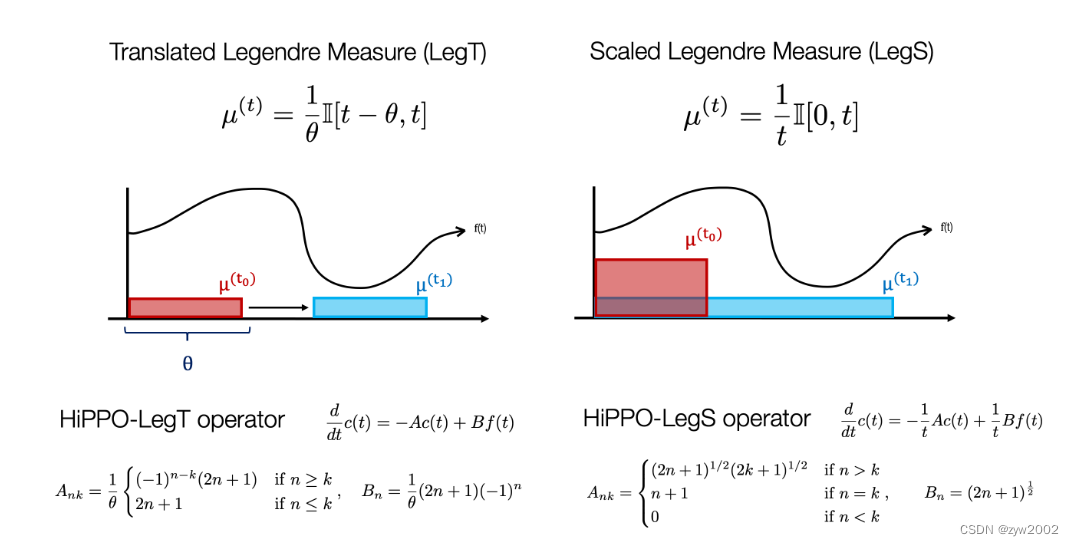
HiPPO是一个简单的线性递归,可以以许多方式集成到端到端模型中,在这里我们将HiPPO集成到RNN中。
进一步理解Mamba的selective 特性
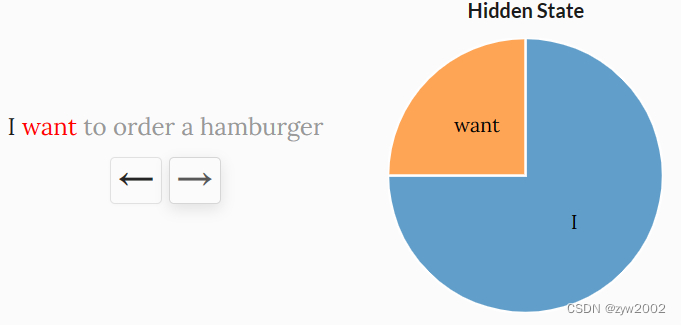
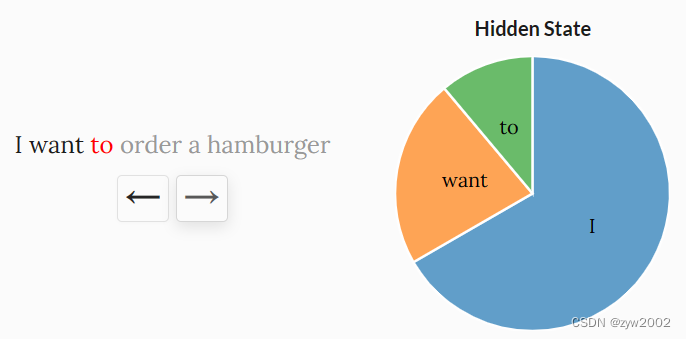
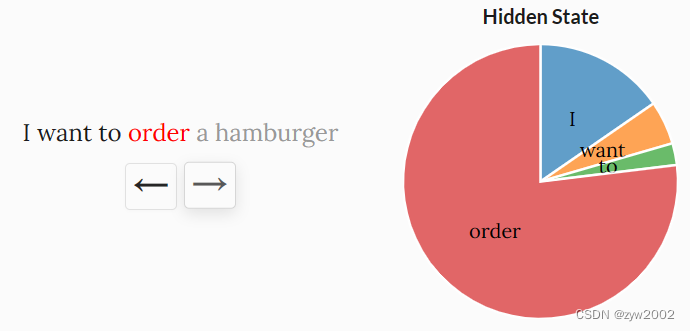
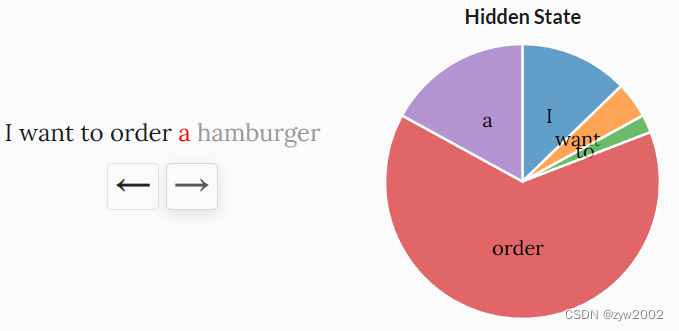
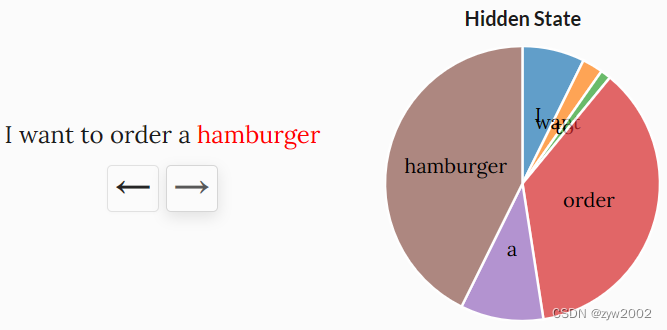
因为S4没有选择性,它被迫以完全相同的方式对待所有输入部分。然而,当你在阅读一个句子时,有些单词不可避免地比其他单词更重要。假设我们有一个模型,它可以根据意图对句子进行分类,我们给它一个句子:“I want to order a hamburger”如果没有选择性,S4在处理每个单词时花费的“精力”是相同的。
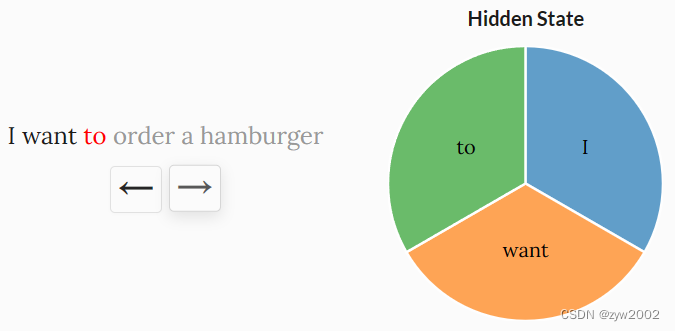
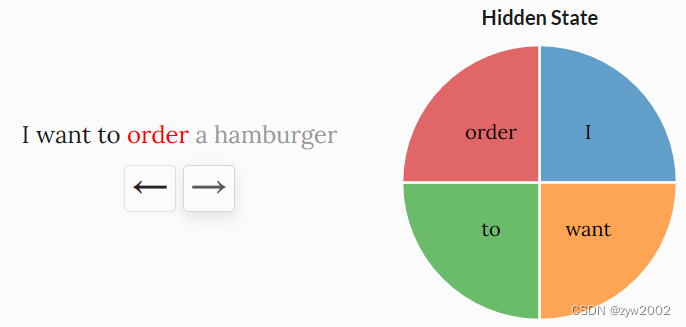
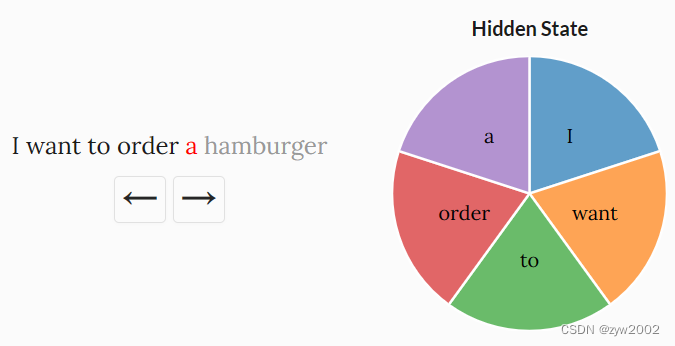
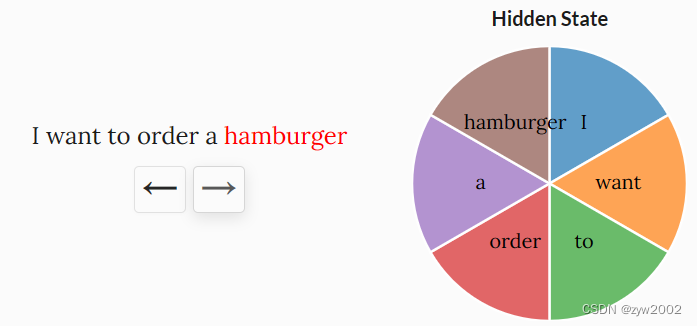
但如果是一个试图对这个句子的意图进行分类的模型,你可能希望更多地“关注”某些单词而不是其他单词。“想要”和“去”这两个词到底对句子的潜在含义没有太大的贡献。实际上,如果我们能把有限的精力更多地花在“订单”和“汉堡”这样的词上,就能知道用户想要做什么,知道用户在点什么。通过使模型参数成为输入的函数,Mamba使“关注”输入中对手头任务更重要的部分成为可能。
进一步理解Mamba中的并行扫描
首先,我们举一个累加前缀和的例子。
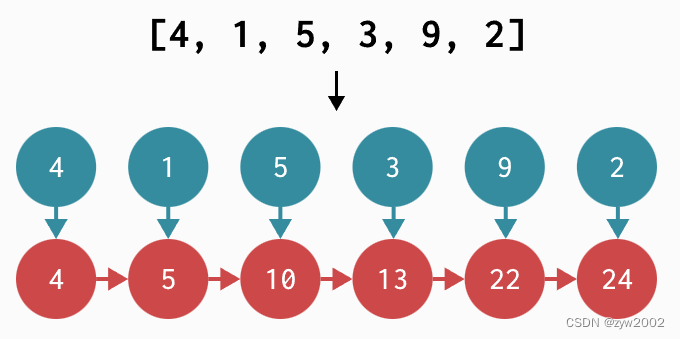
我们可以把这个任务用RNN模式的Mamba来表示。
h t = h t − 1 + x t h_t=h_{t-1}+x_t ht=ht−1+xt。这个公式形成了一个递归式:在每一步,我们通过将前一个存储值与当前输入相加来计算新值。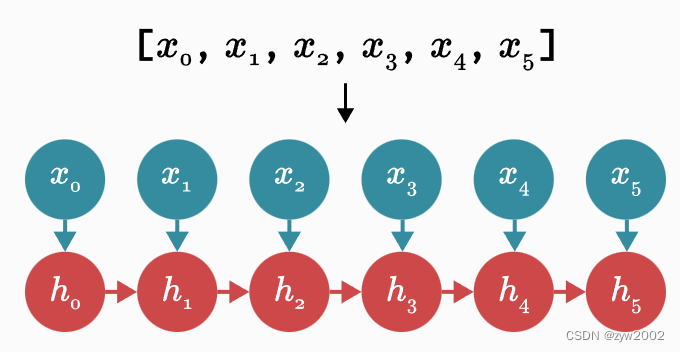
现在,让我们再次看一下更新Mamba的隐藏状态的递归式。
h t = A ˉ h t − 1 + B ˉ x t h_t= \bar A h_{t-1}+\bar B x_t ht=Aˉht−1+Bˉxt
可以发现这两个公式的结构是非常相似的。
虽然计算前缀和在本质上似乎是顺序的,但我们实际上有高效的并行算法来完成这项任务!在下图中,我们可以看到并行前缀和算法的运行,其中每条垂直线表示数组中的一项。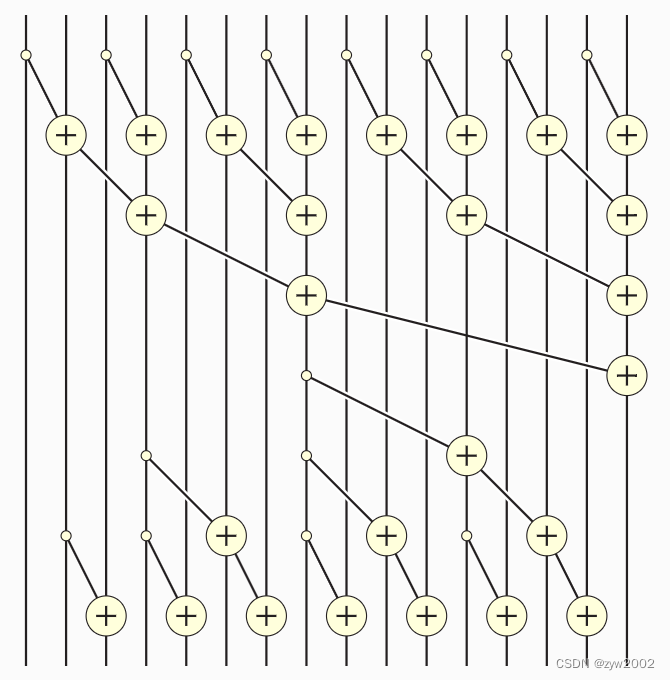
参考文献
A.本博客参考的论文:
[a.1] Mamba: 《Mamba: Linear-Time Sequence Modeling with Selective State Spaces》
[a.2] Linear State-Space Layer (LSSL): 《Combining Recurrent, Convolutional, and Continuous-time Models with Linear State Space Layers》
[a.3]HiPPO《HiPPO: Recurrent Memory with Optimal Polynomial Projections》
[a.4] Legendre polynomial 《Legendre Memory Units: Continuous-Time Representation in Recurrent Neural Networks》
[a.5] Structured State Space for Sequences(S4)《Efficiently Modeling Long Sequences with Structured State Spaces》
[a.6]Simplified State Space Layers for Sequence Modeling(S5) 《Simplified State Space Layers for Sequence Modeling》
B. 本博客参考的讲解:
[b.1] 本文主要参考的Mamba的可视化图解:https://maartengrootendorst.substack.com/p/a-visual-guide-to-mamba-and-state
[b.2] HiPPO的讲解:https://hazyresearch.stanford.edu/blog/2020-12-05-hippo
[b.3] S4的讲解: The Annotated S4
[b.4] 另外一个Mamba的讲解,更多的偏向于数学的角度 Mamba No. 5 (A Little Bit Of…)
[b.5]一本超级详细的书,从数学的角度介绍了很多SSM系列模型 《MODELING SEQUENCES WITH STRUCTURED STATE SPACES》
[b.6] 从直觉的角度理解MambaMamba: The Easy Way
[b.7] 从代码的角度讲解Mamba的实现Mamba: The Hard Way
[b.8] 补充一个S4的讲解Structured State Spaces: Combining Continuous-Time, Recurrent, and Convolutional Models
[b.9] CSDN的一篇博客,介绍的很详细SSM、HiPPO、S4到Mamba
C. 视频讲解
[c.1] NeurIPS-Spotlight-HiPPO
[c.2] YouTube-Mamba Paper Explained
[c.3] Bilibili-Mamba 论文速读
[c.4] YouTube-S4 Explained
D. 代码
[d.1]Mamba的官方代码https://github.com/state-spaces/mamba
