
阅读量:0
FreeModbus版本:1.6
协议栈初始化时会初始化定时器:
eMBInit →
eMBRTUInit →
xMBPortTimersInit( ( USHORT ) usTimerT35_50us )
协议栈使能时会使能定时器:
eMBEnable →
pvMBFrameStartCur →
eMBRTUStart →
vMBPortTimersEnable
定时器使能做的操作是:清除中断标志位,清除计数,使能定时器,重新计数
也就是说每次调用vMBPortTimersEnable
都会清除计数并重新计数
那么这个函数除了使能协议栈时调用了,还用在哪里呢
用在接收状态机里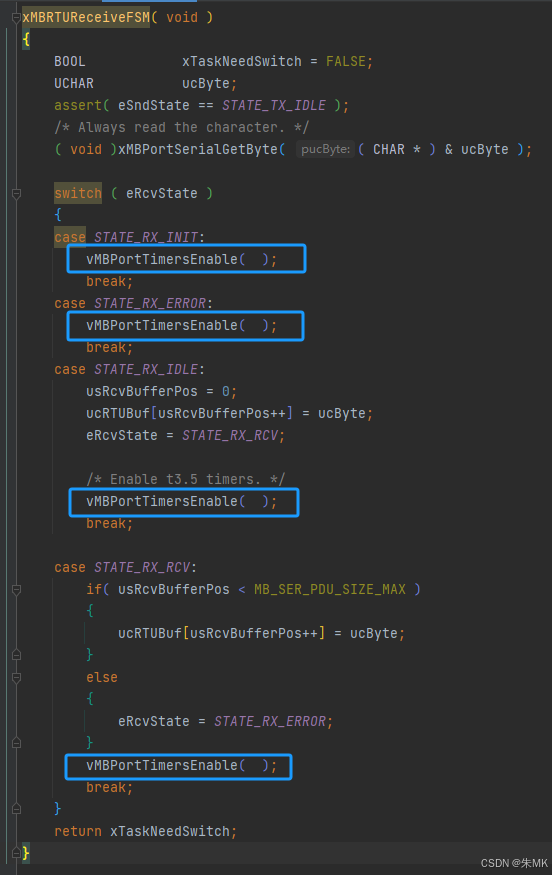
当接收状态机为空闲态STATE_RX_IDLE,接收到第一个数据时作为帧首,然后接收状态机进入接收态STATE_RX_RCV,并且使能定时器(重新计数)。
当接收状态机为接收态STATE_RX_RCV,接收到的数据放入帧中,然后使能定时器(重新计数)。
也就是每接收到一个数据就要重新计数定时器,以防进入中断。
那看中断里实现了什么
定时器中断:
TIM7_IRQHandler →
prvvTIMERExpiredISR →
pxMBPortCBTimerExpired →
xMBRTUTimerT35Expired →
BOOL xMBRTUTimerT35Expired( void ) { BOOL xNeedPoll = FALSE; switch ( eRcvState ) { /* Timer t35 expired. Startup phase is finished. */ case STATE_RX_INIT: xNeedPoll = xMBPortEventPost( EV_READY ); break; /* A frame was received and t35 expired. Notify the listener that * a new frame was received. */ case STATE_RX_RCV: xNeedPoll = xMBPortEventPost( EV_FRAME_RECEIVED ); break; /* An error occured while receiving the frame. */ case STATE_RX_ERROR: break; /* Function called in an illegal state. */ default: assert( ( eRcvState == STATE_RX_INIT ) || ( eRcvState == STATE_RX_RCV ) || ( eRcvState == STATE_RX_ERROR ) ); } vMBPortTimersDisable( ); eRcvState = STATE_RX_IDLE; return xNeedPoll; } 协议栈使能后会将接收状态机置为初始化态STATE_RX_INIT。
接收状态机为空闲态时STATE_RX_IDLE才开始计数。
当接收状态机 为STATE_RX_INIT,进入定时器溢出中断,会发布就绪事件EV_READY 。
当接收状态机 为STATE_RX_RCV,进入定时器溢出中断,会发布已接收事件EV_FRAME_RECEIVED 。说明一帧已经接收完毕。
并且在定时器溢出中断的最后,会把接收状态机置为STATE_RX_IDLE。
接收状态机为空闲态时,接收到一个字符,会进入串口接收中断,串口接收中断中会将接收到的字符保存作为帧首,并且把接收状态机变为STATE_RX_RCV。 也就是接收状态机为接收态,每接收到一个字符,会进入中断,然后把定时器清0。直到距离下个字符超过定时器溢出时间,进入定时器中断,此时接受状态机为STATE_RX_RCV,这就意味着接受完成了一帧。然后发布事件EV_FRAME_RECEIVED
定时器中断里为什么会有一个STATE_RX_INIT的状态判断呢?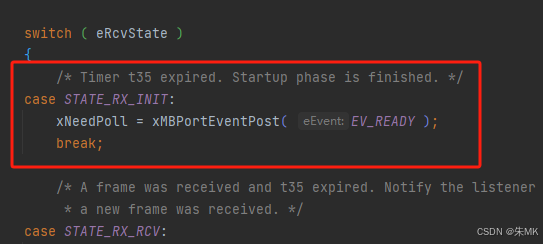
因为协议栈使能后会将接收状态机置为初始化态STATE_RX_INIT。
但是万一这个时候串口接收寄存器已经有数据了咋办,那会进入串口接收中断函数,会调用xMBRTUReceiveFSM,当接收状态机为STATE_RX_INIT时,会清空定时器重新计数。
接收状态机为空闲态时STATE_RX_IDLE才开始读取一帧数据。
所以如果STATE_RX_INIT时有数据了,也不会读的,因为无法判断这个数是不是一帧的第一个字符。
所以STATE_RX_INIT时在xMBRTUReceiveFSM里会清空定时器。
直到定时器溢出。
然后会将接收状态机置为空闲态STATE_RX_IDLE。
这个时候在有数据,就可以作为帧首了。
当接收状态机 为STATE_RX_RCV,进入定时器溢出中断,会发布已接收事件EV_FRAME_RECEIVED 。说明一帧已经接收完毕。
这个时候eMBPoll中接收到事件EV_FRAME_RECEIVED ,就可以处理这一帧数据了。
