
阅读量:0
编者按:深度学习的飞速发展离不开硬件技术的突破,而 GPU 的崛起无疑是其中最大的推力之一。但你是否曾好奇过,为何一行简单的“.to(‘cuda’)”代码就能让模型的训练速度突飞猛进?本文正是为解答这个疑问而作。
作者以独特的视角,将复杂的 GPU 并行计算原理转化为通俗易懂的概念。从 CPU 与 GPU 的设计哲学对比,到 CUDA 编程的核心要素,再到具体的代码实现,文章循序渐进地引领读者把握 GPU 并行计算的精髓。特别是文中巧妙的比喻 —— 将 CPU 比作法拉利,GPU 比作公交车,这一比喻生动形象地诠释了两种处理器的特性。
这篇文章不仅回答了"为什么",更指明了"如何做",在当前人工智能技术飞速发展的背景下,理解底层技术原理的重要性不言而喻。这篇文章虽为入门级别的技术内容介绍,但也提到了更高级的优化技术和工具库,指明了进一步的学习方向,具有一定的学习和参考价值。
作者 | Lucas de Lima Nogueira
编译 | 岳扬

Image by the author with the assistance of AI (https://copilot.microsoft.com/images/create)
现如今,当我们提及深度学习时,人们自然而然地会联想到通过 GPU 来增强其性能。
GPU(图形处理器,Graphical Processing Units)起初是为了加速图像(images)及 2D、3D 图形(graphics)的渲染而生。但凭借其强大的并行运算能力,GPU 的应用范围迅速拓展,已扩展至深度学习(deep learning)等应用领域。
GPU 在深度学习模型中的应用始于 2000 年代中后期,2012 年 AlexNet 的横空出世更是将这种趋势推向高潮。 AlexNet,这款由 Alex Krizhevsky、Ilya Sutskever 和 Geoffrey Hinton 共同设计、研发的卷积神经网络,在 2012 年的 ImageNet Large Scale Visual Recognition Challenge (ILSVRC) 上一鸣惊人。这一胜利具有里程碑式的意义,它不仅证实了深度神经网络在图像分类领域(image classification)的卓越性能,同时也彰显了使用 GPU 训练大型模型的有效性。
在这一技术突破之后,GPU 在深度学习模型中的应用愈发广泛,PyTorch 和 TensorFlow 等框架应运而生。
如今,我们只需在 PyTorch 中轻敲 .to(“cuda”),即可将数据传递给 GPU,从而加速模型的训练。但在实践中,深度学习算法究竟是如何巧妙地利用 GPU 算力的呢?让我们一探究竟吧!
深度学习的核心架构,如神经网络、CNNs、RNNs 和 transformer,其本质都围绕着矩阵加法(matrix addition)、矩阵乘法(matrix multiplication)以及对矩阵应用函数(applying a function a matrix)等基本数学操作展开。因此,优化这些核心运算,便是提升深度学习模型性能的关键所在。
那么,让我们从最基础的场景说起。想象一下,你需要对两个向量执行相加操作 C = A + B。

可以用 C 语言简单实现这一功能:
不难发现,传统上,计算机需逐一访问向量中的各个元素(elements),在每次迭代中按顺序对每对元素进行加法运算。但有一点需要注意,各对元素间的加法操作互不影响,即任意一对元素的加法不依赖于其它任何一对。那么,若我们能同时执行这些数学运算,实现所有元素对(pairs of elements)的并行相加,效果会如何呢?
直接做法是借助 CPU 的多线程功能,并行执行所有数学运算。但在深度学习领域,我们需要处理的向量规模巨大,往往包含数百万个元素。通常情况下,普通 CPU 只能同时处理十几条线程。此时,GPU 的优势便凸显出来!目前的主流 GPU 能够同时运行数百万个线程,极大地提高了处理大规模向量中数学运算的效率。
01 GPU vs. CPU comparison
虽然从单次运算(single operation)的处理速度来看,CPU 或许略胜 GPU 一筹,但 GPU 的优势在于其卓越的并行处理能力。究其根源,这一情况源于两者设计初衷的差异。CPU 的设计侧重于高效执行单一序列的操作(即线程(thread)),但一次仅能同时处理几十个;相比之下,GPU 的设计目标是实现数百万个线程的并行运算,虽有所牺牲单个线程的运算速度,却在整体并行性能上实现了质的飞跃。
打个比方,你可以将 CPU 视作一辆炫酷的法拉利(Ferrari)跑车,而 GPU 则如同一辆宽敞的公交车。倘若你的任务仅仅是运送一位乘客,毫无疑问,法拉利(CPU)是最佳选择。然而,如若当前的运输需求是运送多位乘客,即使法拉利(CPU)单程速度占优,公交车(GPU)却能一次容纳全部乘客,其集体运输效率远超法拉利多次单独接送的效率。由此可见,CPU 更适于处理连续性的单一任务,而 GPU 则在并行处理大量任务时展现出色的效能。

Image by the author with the assistance of AI (https://copilot.microsoft.com/images/create)
为了实现更出色的并行计算能力,GPU 在设计上倾向于将更多晶体管资源(transistors)投入到数据处理中,而非数据缓存(data caching)和流控机制(flow contro),这与 CPU 的设计思路大相径庭。CPU 为了优化单一线程的执行效率和复杂指令集的处理,特意划拨了大量的晶体管来加强这些方面的性能。
下图生动地描绘了 CPU 与 GPU 在芯片资源分配上的显著差异。
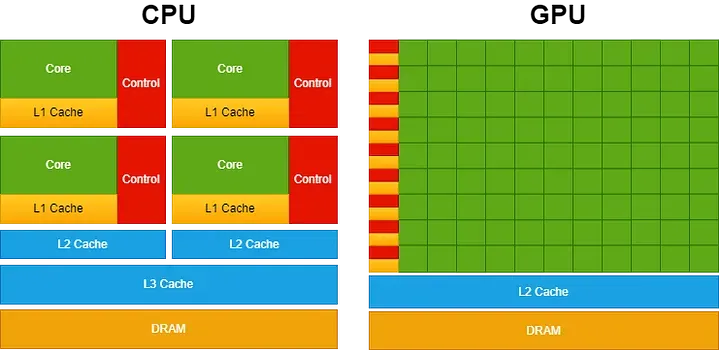
Image by the author with inspiration from CUDA C++ Programming Guide
(https://docs.nvidia.com/cuda/pdf/CUDA_C_Programming_Guide.pdf)
CPU 配备了高性能内核(powerful cores)与更为精妙的缓存内存架构(cache memory architecture)(消耗了相当多的晶体管资源),这种设计方案能够极大地优化顺序任务的执行速度。而图形处理器(GPU)则着重于内核(cores)数量,以实现更高的并行处理能力。
现在已经介绍完这些基础知识,那么在实际应用中,我们应如何有效利用并行计算的优势呢?
02 Introduction to CUDA
当我们着手构建深度学习模型时,很可能会倾向于采用诸如 PyTorch 或 TensorFlow 这类广受欢迎的 Python 开发库。尽管如此,一个不争的事实是,这些库的核心代码都是 C/C++ 代码。另外,正如我们先前所提及的,利用 GPU 加快数据的处理速度往往是一种主流优化方案。此时,CUDA 的重要作用便凸显出来!CUDA 是统一计算设备架构(Compute Unified Device Architecture)的缩写,是英伟达(NVIDIA)为使 GPU 能够在通用计算领域大放光彩而精心打造的平台。与 DirectX 被游戏引擎用于图形运算(graphical computation)不同,CUDA 使开发人员能够将英伟达(NVIDIA)的 GPU 计算能力集成到通用软件中,而不仅仅局限于图形渲染。
为了实现这一目标,CUDA 推出了一款基于 C/C++ 的简易接口(CUDA C/C++),帮助开发者调用 GPU 虚拟指令集(virtual intruction se)及执行特定操作(specific operations)(如在 CPU 与 GPU 间传输数据)。
在继续深入技术细节之前,我们有必要澄清几个 CUDA 编程的基础概念和专业术语:
- host:特指 CPU 及其配套内存;
- device:对应 GPU 及其专属内存;
- kernel:指代在设备(GPU)上运行的函数代码;
因此,在一份使用 CUDA 撰写的基本代码(basic code)中,程序主体在 host (CPU) 上执行,随后将数据传递给 device (GPU) ,并调用 kernels (functions) 在 device (GPU) 上并行运行。这些 kernels 由多条线程同时执行。运算完成后,结果再从 device (GPU) 回传至 host (CPU) 。
话说回来,让我们再次聚焦于两组向量相加这个具体问题:
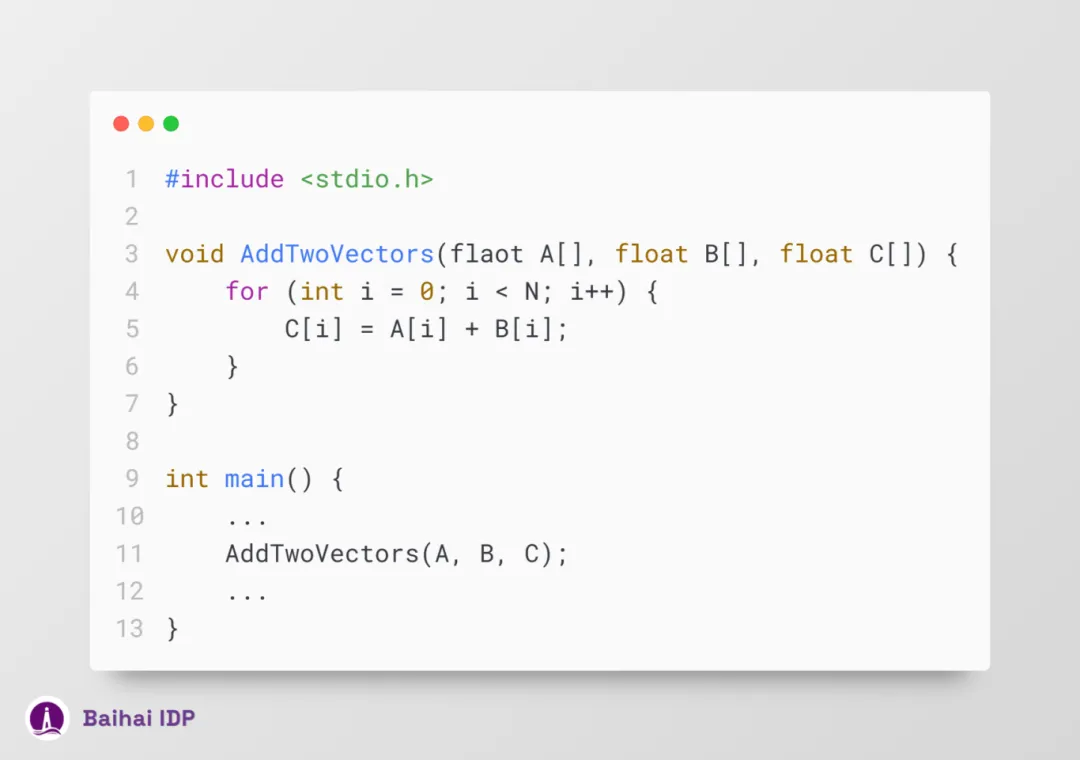
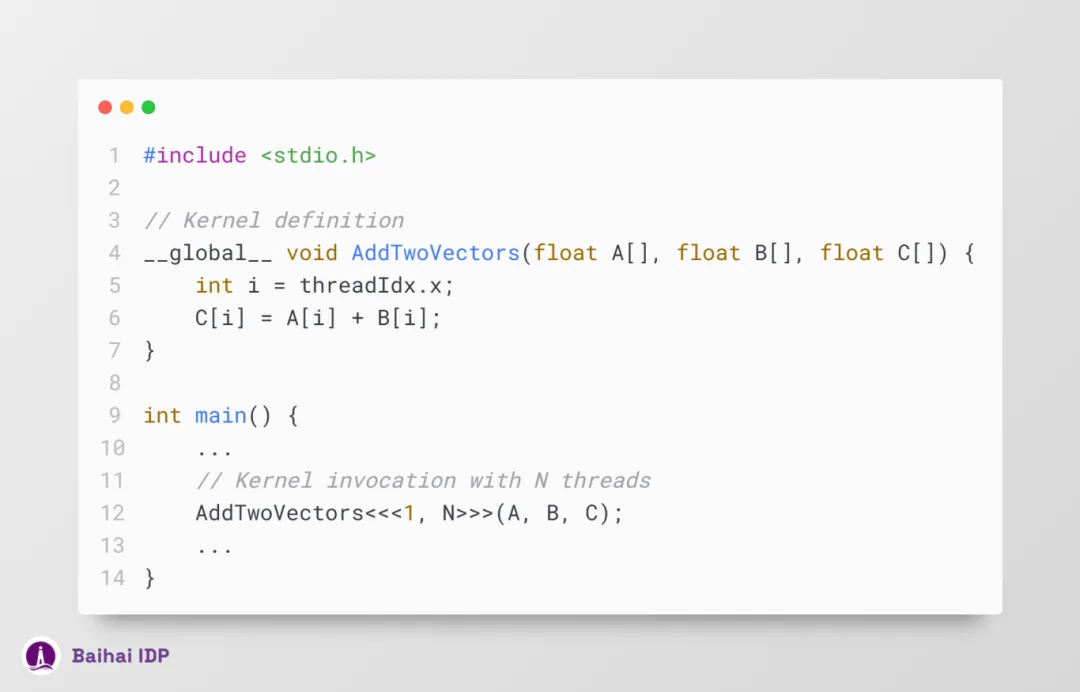
借助 CUDA C/C++,编程人员能够创建一种被称为 kernels 的 C/C++ 函数;一旦这些 kernels 被调用, N 个不同的 CUDA 线程会并行执行 N 次。
若想定义这类 kernel,可运用 __global__ 关键字作为声明限定符(declaration specifier),而若欲设定执行该 kernel 的具体 CUDA 线程数目,则需采用 <<<...>>> 来完成:

每个 CUDA 线程在执行 kernel 时,都会被赋予一个独一无二的线程 ID,即 threadIdx,它可以通过 kernel 中的预设变量获取。上述示例代码将两个长度(size)均为 N 的向量 A 和 B 相加,并将结果保存到向量 C 中。值得我们注意的是,相较于循环逐次处理成对加法的传统串行方式,CUDA 的优势在于其能够并行利用 N 个线程,一次性完成全部加法运算。
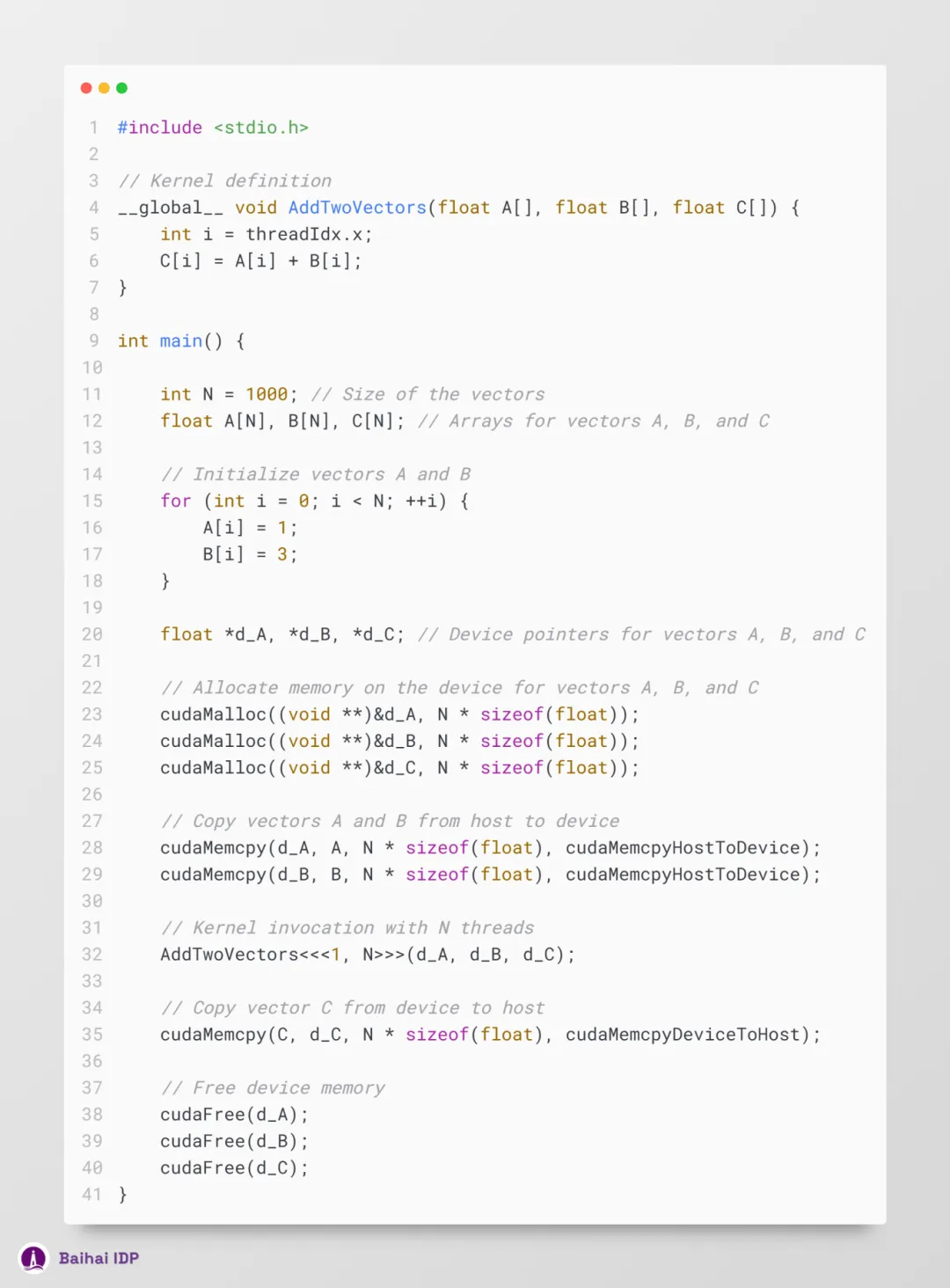
不过,在运行上述这段代码前,我们还需对其进行一次修改。切记,kernel 函数的运行环境是 device (GPU) ,这意味着所有相关数据均须驻留于 device 的内存之中。 要达到这一要求,可以借助 CUDA 提供的以下内置函数:

直接将变量 A、B 和 C 传入 kernel 的做法并不适用于本情况,我们应当使用指针。在 CUDA 编程环境下,host 数组(比如示例中的 A、B 和 C)无法直接用于 kernel 启动(<<<…>>>)。鉴于 CUDA kernels 的工作空间为 device 的内存(device memory),故需向 kernel 提供 device 指针(device pointers)(d_A、d_B 和 d_C),以确保其能在 device 的内存上运行。
除此之外,我们还需通过调用 cudaMalloc 函数在 device 上划分内存空间,并运用 cudaMemcpy 实现 host 和 device 之间的数据传输。
至此,我们可在代码中实现向量 A 和 B 的初始化,并在程序结尾处清理 CUDA 内存(cuda memory)。
另外,调用 kernel 后,务必插入 cudaDeviceSynchronize(); 这一行代码。该函数的作用在于协调 host 线程与 device 间的同步,确保 host 线程在继续执行前,device 已完成所有先前提交的 CUDA 操作。
此外,CUDA 的错误检测机制同样不可或缺,这种检测机制能协助我们及时发现并修正 GPU 上潜在的程序缺陷(bugs)。倘若忽略此环节,device 线程(CPU)将持续运行,而 CUDA 相关的故障排查则将变得异常棘手,很难识别与 CUDA 相关的错误。
下面是这两种技术的具体实现方式:

要编译和运行 CUDA 代码,首先需要确保系统中已装有 CUDA 工具包(CUDA toolkit)。紧接着,使用 nvcc —— NVIDIA CUDA 编译器完成相关代码编译工作。

然而,当前的代码尚存优化空间。在前述示例中,我们处理的向量规模仅为 N = 1000,这一数值偏小,难以充分展示 GPU 强大的并行处理能力。特别是在深度学习场景下,我们时常要应对含有数以百万计参数的巨型向量。然而,倘若尝试将 N 的数值设为 500000,并采用 <<<1, 500000>>> 的方式运行 kernel ,上述代码便会抛出错误。因此,为了完善代码,使之能顺利执行此类大规模运算,我们亟需掌握 CUDA 编程中的核心理念 —— 线程层级结构(Thread hierarchy)。
03 Thread hierarchy(线程层级结构)
调用 kernel 函数时,采用的是 <<<number_of_blocks, threads_per_block>>> 这种格式(notation)。因此,在上述示例中,我们是以单个线程块的形式,启动了 N 个 CUDA 线程。然而,每个线程块所能容纳的线程数量都有限制,这是因为所有处于同一线程块内的线程,都被要求共存于同一流式多处理器核心(streaming multiprocessor core),并共同使用该核心的内存资源。
欲查询这一限制数量的具体数值,可通过以下代码实现:

就作者当前使用的 GPU 而言,其单一线程块最多能承载 1024 个线程。因此,为了有效处理示例中提及的巨型向量(massive vector),我们必须部署更多线程块,以实现更大规模的线程并发执行。 同时,这些线程块被精心布局成网格状结构(grids),如下图所展示:

https://handwiki.org/wiki/index.php?curid=1157670 (CC BY-SA 3.0)
现在,我们可以通过以下途径获取线程 ID:

于是,该代码脚本更新为:

04 性能对比分析
下表展示了在处理不同大小向量的加法运算时,CPU 与 GPU 的计算性能对比情况。

Image by the author
显而易见,GPU 的处理效能优势,唯有在处理大规模向量时方能得以凸显。此外,切勿忽视一件事,此处的时间对比仅仅考量了 kernel/function 的执行耗时,而未将 host 和 device 间数据传输所需的时间纳入考虑范围。尽管在大多数情况下,数据传输的时间开销微不足道,但就我们目前仅执行简易加法运算(simple addition operation)的情形而言,这部分时间消耗却显得相对可观。因此,我们应当铭记,GPU 的计算性能,仅在面对那些既高度依赖计算能力又适合大规模并行处理的任务时,才能得以淋漓尽致地展现。
05 多维线程处理(Multidimensional threads)
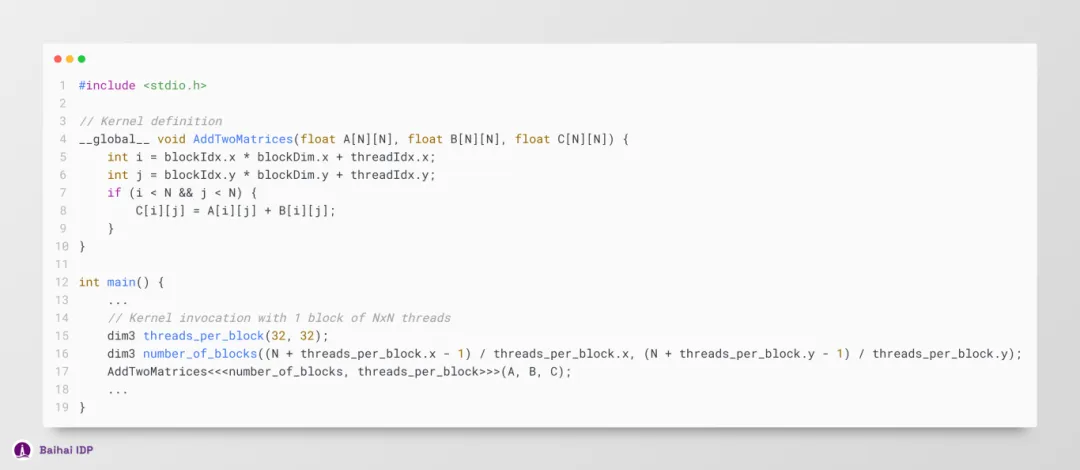
现在,我们已经知道如何提升简单数组操作(simple array operation)的性能了。然而,在处理深度学习模型时,必须要处理矩阵和张量运算(matrix and tensor operations)。在前文的示例中,我们仅使用了内含 N 个线程的一维线程块(one-dimensional blocks)。然而,执行多维线程块(multidimensional thread blocks)(最高支持三维)同样也是完全可行的。因此,为了方便起见,当我们需要处理矩阵运算时,可运行一个由 N x M 个线程组成的线程块。还可以通过 row = threadIdx.x 来确定矩阵的行索引,而 col = threadIdx.y 则可用来获取列索引。此外,为了简化操作,还可以使用 dim3 变量类型定义 number_of_blocks 和 threads_per_block。
下文的示例代码展示了如何实现两个矩阵的相加运算。

此外,我们还可以将此示例进一步拓展,实现对多个线程块的处理:
此外,我们也可以用同样的思路将这个示例扩展到三维运算(3-dimensional operations)操作的处理。
上文已经介绍了处理多维数据(multidimensional data)的方法,接下来,还有一个既重要又容易理解的概念值得我们学习:如何在 kernel 中调用 functions。 一般可以通过使用 __device__ 声明限定符(declaration specifier)来实现。这种限定符定义了可由 device (GPU)直接调用的函数(functions)。因此,这些函数仅能在 __global__ 或其他 __device__ 函数中被调用。下面这个示例展示了如何对一个向量进行 sigmoid 运算(这是深度学习模型中极其常见的一种运算方式)。
至此,我们已经掌握了 CUDA 编程的核心概念,现在可以着手构建 CUDA kernels 了。对于深度学习模型而言,其实质就是一系列涉及矩阵(matrix)与张量(tensor)的运算操作,包括但不限于求和(sum)、乘法(multiplication)、卷积(convolution)以及归一化(normalization )等。举个例子,一个基础的矩阵乘法算法,可以通过以下方式实现并行化:


我们可以注意到,在 GPU 版本的矩阵乘法算法中,循环次数明显减少,从而显著提升了运算处理速度。下面这张图表直观地展现了 N x N 矩阵乘法在 CPU 与 GPU 上的性能对比情况:

Image by the author
我们会发现,随着矩阵大小(matrix size)的增大,GPU 在处理矩阵乘法运算时的性能提升幅度更大。
接下来,让我们聚焦于一个基础的神经网络模型,其核心运算通常表现为 y = σ(Wx + b),如下图所示:

Image by the author
上述运算主要涉及矩阵乘法(matrix multiplication)、矩阵加法(matrix addition)以及对数组施加函数变换(applying a function to an array)。如若你已掌握这些并行化处理技术,意味着你现在完全具备了从零构建、并在 GPU 上构建神经网络的能力!
06 Conclusion
本文我们探讨了通过 GPU processing (译者注:使用 GPU进行数据处理和计算。)提升深度学习模型效能的入门概念。不过,有一点还需要指出,本文所介绍的内容仅仅是皮毛,背后还隐藏着很多很多更深层次的东西。PyTorch 和 Tensorflow 等框架实现了诸多高级性能优化技术,涵盖了 optimized memory access、batched operations 等复杂概念(其底层利用了基于 CUDA 的 cuBLAS 和 cuDNN 等库)。 但愿这篇文章能够让各位读者对使用 .to(“cuda”) 方法,在 GPU 上构建、运行深度学习模型时的底层原理,有个初步的了解。
Thanks so much for reading! 😊
Lucas de Lima Nogueira
https://www.linkedin.com/in/lucas-de-lima-nogueira/
END
原文链接:
https://towardsdatascience.com/why-deep-learning-models-run-faster-on-gpus-a-brief-introduction-to-cuda-programming-035272906d66
