阅读量:0
李群李代数+扰动+bundle adjustment
这个博客系列会分为C++ STL-面经、常考公式推导和SLAM面经面试题等三个系列进行更新,基本涵盖了自己秋招历程被问过的面试内容(除了实习和学校项目相关的具体细节)。在知乎和牛客也会同步更新,全网同号(lonely-stone或者lonely_stone)。
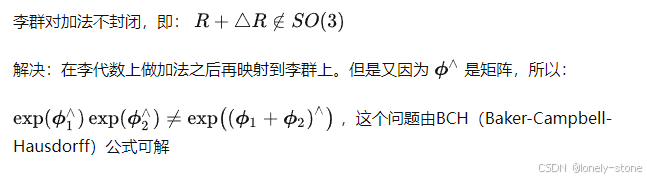
1. 李群李代数基本运算
这部分比较基础(是slam十四讲内容),但是可以常看看。不需要记住具体转换,但是能更熟悉各种变量之间的关系(不要觉着很简单)(下面这张图是转载来自知乎博主,名字在图片右下角)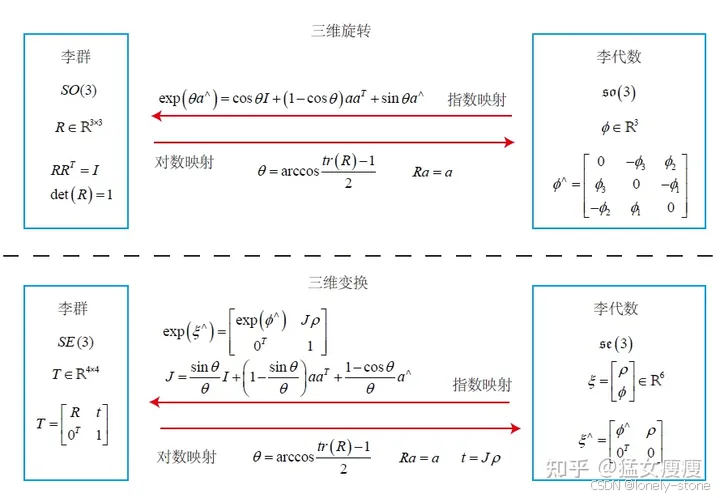
2. 求导
这篇博客里的内容在slam十四讲都有,但是求导一般在面试中不会问,更多的还是问下面的扰动部分。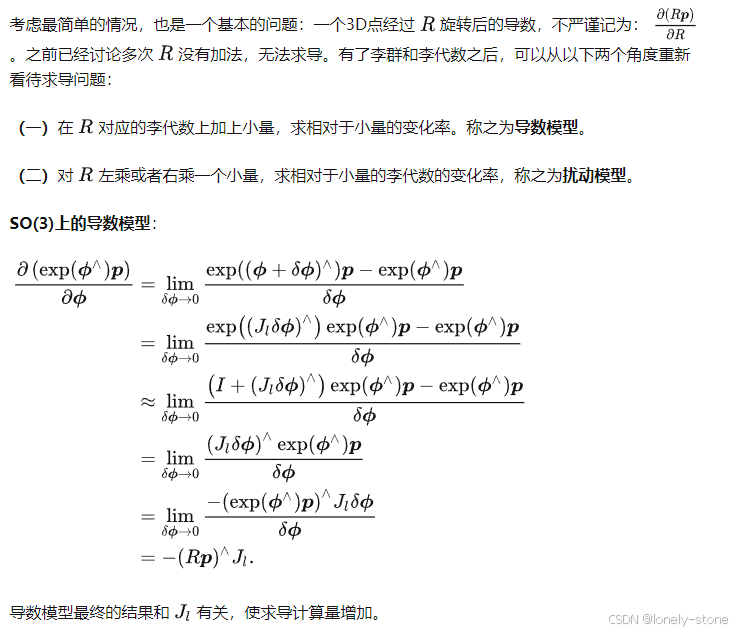
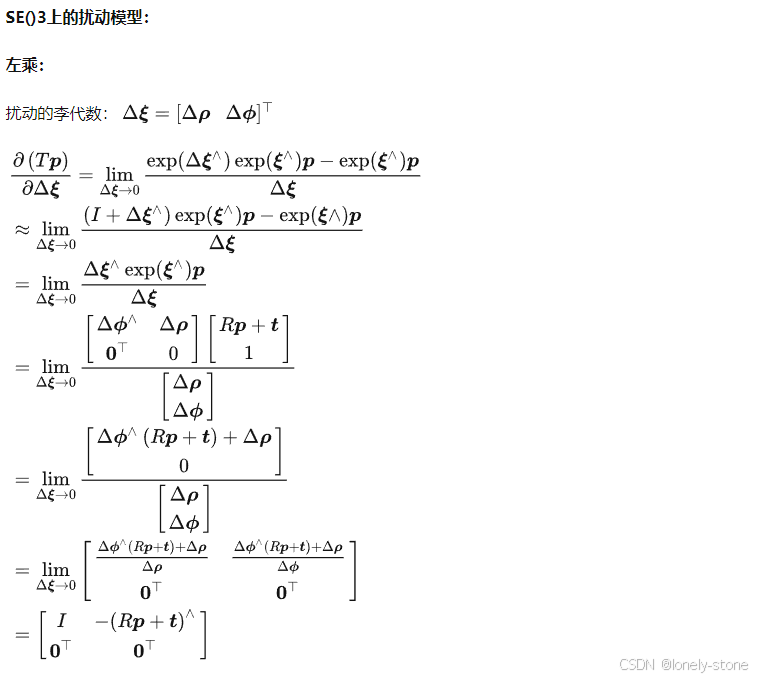
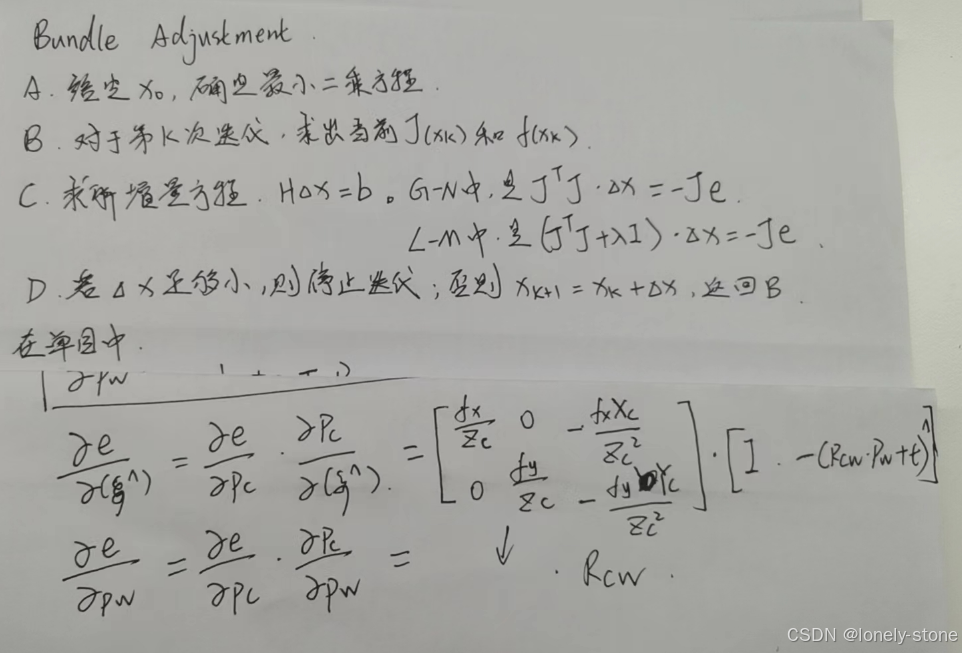
3. 左右扰动模型+bundle adjustment
3.1 SO3扰动模型
扰动部分的相关推导计算就是一定要会的,这些在每家公司中的面试基本都是会问到或者手推的。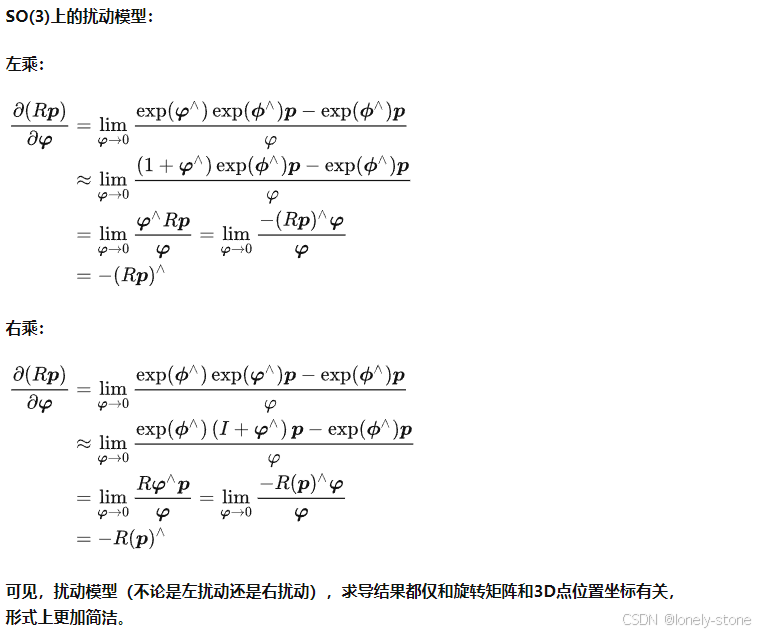
3.2 光度误差:
可以看到,在梯度为0的地方,雅克比矩阵是为0的,对计算运动增量是没有任何贡献的,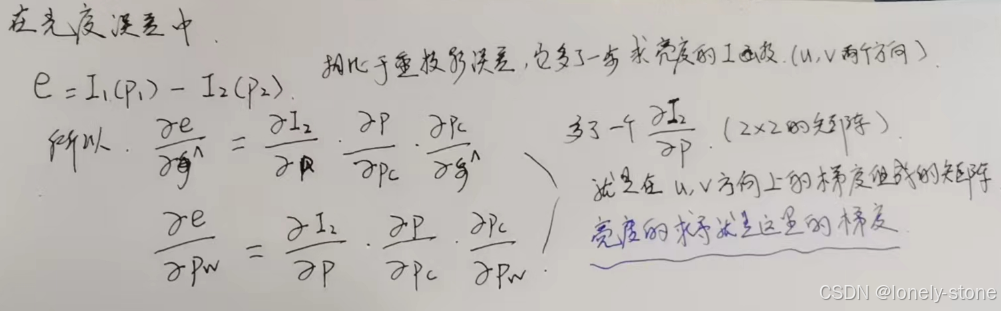
3.3 SE3左乘扰动+bundle adjustment