
阅读量:0
CDEF允许编解码器沿某些(可能是倾斜的)方向应用非线性消阶滤波器。它以8×8为单位进行。如下图所示,通过旋转和反射所示的三个模板来定义八个预设方向。
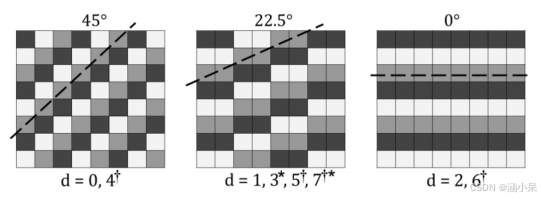
directions. The templates correspond to directions of 45◦, 22.5◦, and
0◦, as shown by the dash lines. Each preset direction d ∈ {0,...,7}
can be obtained by using the template directly, rotating the
template by 90◦ clockwise (marked by †) or reflecting the template
along the horizontal axis (marked by ρ)
解码器利用重建像素通过最小化下式来选择向索引
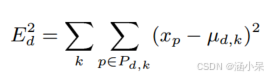
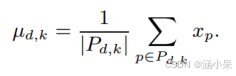
式中xp为像素p的值,Pd,k为沿d方向k行的像素,μd,k为Pd,k的平均值;
一个主要的滤波器是沿着所选的方向应用,而一个次要的滤波器沿着主方向的偏移45◦的方向应用。像素p(x, y)的滤波运算公式为
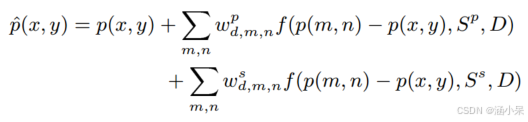
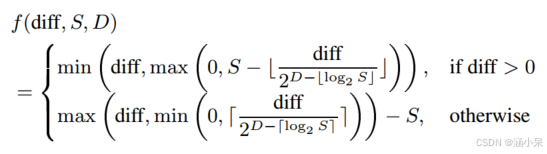
其中 wp d,m,n 和 ws d,m,n 分别为与主滤波器和次滤波器相关联的滤波器系数,如下图所示。其中Sp、Ss为主要滤波器和次要滤波器的强度指标,D为阻尼系数。f()是一个分段线性函数
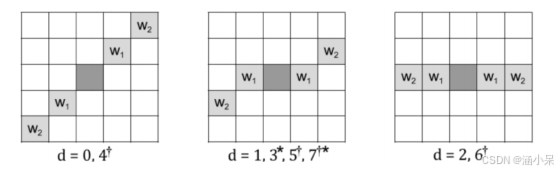
d ∈ {0,...,7} (subject to rotation and reflection), where w1 4/16
and w2 2/16 for even strength indexes, and w1 w2 3/16 for
odd strength indexes.
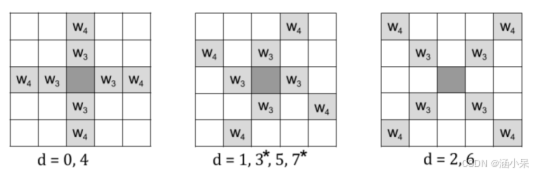
(subject to reflection), where w3 2/16 and w4 1/16. The
secondary filter is applied along the direction 45◦ off the
corresponding primary direction d.
它排除了值远离p(x, y)的参考像素。注意,参考像素p(m, n)是在应用去块滤波器之后,但在应用CDEF滤波器之前重建的像素。
Frame Header中传输多达八组滤波器参数,包括亮度和色度分量的主滤波器和次滤波器强度指标。每个64 × 64块从预设中选择一组来控制滤波器操作。