
阅读量:0
最小角回归算法简介
最小角回归(Least Angle Regression, LAR)是一种用于回归分析的统计方法,它在某些方面类似于最小二乘回归,但提供了一些额外的优点。最小角回归由Bradley Efron等人提出,主要用于处理具有高度相关性的特征集。
最小角回归算法的核心思想是逐步添加特征到模型中,每次添加与当前残差相关性最大的特征。这个过程通过最小化角(即特征与残差之间的夹角)来实现,从而确保模型的稀疏性。这使得LAR算法在处理具有多重共线性的数据集时特别有用。
我们直接看最基本的LAR算法,假设有N个样本,自变量是p维的:
- 先对
 做标准化处理,使得每个predictor(的每列)满足,。我们先假设回归模型中只有截距项,则,记残差,而其他的系数。
做标准化处理,使得每个predictor(的每列)满足,。我们先假设回归模型中只有截距项,则,记残差,而其他的系数。 - 找出与相关性最大的,加入active set;
- 将从0逐步向LS系数变动,直到有另一个,它与的相关系数绝对值,和与的相关系数绝对值一样大;
- 将和同时向二者的联合LS系数变动,直到再出现下一个,它与的相关系数满足上一步的条件;
- 重复上述过程,步后,就得到完整的LS解。
最小角回归算法主要解决的问题
- 多重共线性:数据集中的特征之间存在高度相关性,这可能导致最小二乘回归模型的参数估计不稳定。
- 特征选择:在特征数量多于样本数量的情况下,需要选择对模型预测最有帮助的特征子集。
- 稀疏模型:需要一个具有较少非零系数的模型,以便于解释和减少模型复杂度。
- 稳健性:在数据中存在噪声或异常值时,需要一个对这些情况不敏感的模型。
- 预测准确性:在保持模型简洁的同时,追求较高的预测准确性。
- 线性回归问题:LAR可以应用于标准的线性回归问题,即预测一个连续的响应变量。
- 逻辑回归问题:通过适当的修改,LAR也可以应用于分类问题,如逻辑回归。
- 多元回归问题:LAR可以处理多个响应变量的回归问题,即多元线性回归。
- 正则化问题:LAR提供了一种正则化方法,可以控制模型的复杂度,防止过拟合。
- 交叉验证问题:在模型选择过程中,LAR可以用于交叉验证,以选择最佳的模型复杂度。
- 模型解释性:由于LAR倾向于产生稀疏模型,因此它可以提高模型的可解释性。
- 大规模数据集:LAR算法适用于大规模数据集,尤其是当数据集中的特征数量非常多时。
最小角回归算法基本思想和理论基础
最小角回归算法基本思想
- 稀疏模型:LAR的目标是构建一个稀疏的回归模型,即模型中只有少数几个特征具有非零系数,这有助于提高模型的可解释性和降低过拟合的风险。
- 逐步添加特征:LAR通过逐步添加特征到模型中来构建。在每一步中,算法选择当前与残差相关性最大的特征加入模型,这个过程是迭代的。
- 最小化角:LAR的核心思想是最小化特征向量与残差向量之间的夹角。这个夹角的大小代表了特征对当前残差解释能力的大小。选择夹角最小的特征意味着选择了最能解释当前残差的特征。
- 正则化:LAR通过正则化项控制模型的复杂度,类似于LASSO算法,但LAR的正则化是通过最小化角来实现的,而不是直接对系数的大小进行惩罚。
- 数据驱动:LAR算法是数据驱动的,它根据数据本身的特性来选择特征,而不是依赖于预先设定的模型假设。
- 稳健性:由于LAR算法在每一步都考虑了特征与残差的相关性,它对数据中的噪声和异常值具有一定的稳健性。
- 快速计算:LAR算法利用了数据的稀疏性质和快速的更新规则,使得算法在计算上相对高效。
- 灵活性:LAR算法可以应用于不同类型的回归问题,包括线性回归、逻辑回归等,并且可以处理大规模数据集。
- 交叉验证:LAR算法可以结合交叉验证等方法来选择最佳的正则化参数,实现模型的自动选择。
- 模型解释性:由于LAR倾向于产生稀疏模型,它提高了模型的可解释性,使得模型更容易被理解和应用。
最小角回归算法理论基础
- 线性回归问题:LAR算法是针对线性回归问题设计的,它通过逐步添加特征的方式进行特征选择和回归系数的计算 。
- 特征向量分解:LAR算法的核心在于将回归目标向量分解为若干组特征向量的线性组合,关键在于选择正确的特征向量分解顺序和分解系数 。
- 前向选择算法:LAR算法与前向选择算法(Forward Selection)有关,前向选择算法是一种贪婪算法,通过选择与目标向量相关度最高的特征向量进行分解 。
- 前向梯度算法:LAR算法也与前向梯度算法(Forward Stagewise)有关,该算法通过小步试错的方式进行特征向量的选择和分解 。
- 最小化角:LAR算法通过最小化特征向量与残差向量之间的夹角来进行特征选择,这种方法结合了前向选择算法的快速性和前向梯度算法的准确性 。
- 正则化方法:LAR算法是一种正则化方法,它可以求解Lasso回归问题,并且可以得到Lasso解的路径 。
- 算法性质:LAR算法保持最小角的性质,即在分解过程中,每个predictor与残差向量的相关系数会同比例地减少 。
- 模型的求解:LAR算法通过逐步更新残差向量和逐步调整回归系数,直到满足终止条件,如残差向量足够小或所有变量都已使用完毕 。
- 稳定性和灵活性:LAR算法具有很好的稳定性和灵活性,适用于特征维度远高于样本数的情况,并且可以容易地修改以适应其他估算器,如LASSO 。
- 算法效率:LAR算法在计算上非常有效,特别是当特征维度远大于样本数量时,它的计算速度几乎和前向选择算法一样快
最小角回归算法步骤
1.初始化:
将所有特征的系数初始化为零。
计算初始残差向量,即响应向量与所有特征系数为零时的残差。
2.标准化特征:
为了确保算法不受特征尺度的影响,对所有特征向量进行标准化处理。
3.构建活动集:
初始化一个活动集(active set),包含与当前残差向量相关性最大的特征。
4.计算相关性:
对于每个特征,计算它与当前残差向量的相关系数。
5.选择特征:
选择与当前残差向量相关性最大的特征,将其添加到活动集中。
6.更新系数:
对活动集中的每个特征,逐步更新其系数,直到另一个特征的相关性与当前特征相同。
7.调整系数:
当两个或多个特征与残差向量的相关性相等时,同时更新这些特征的系数,直到它们的相关性不再相等。
8.更新残差:
使用当前的系数和特征向量来更新残差向量。
9.检查终止条件:
如果残差向量的范数低于某个阈值,或者已经没有更多的特征可以添加到模型中,则算法终止。
10.重复迭代:
重复步骤4到9,直到满足终止条件。
11.输出结果:
最终,算法输出模型的系数向量,这些系数代表了特征对响应变量的影响。
最小角回归算法推导
保持最小角
我们先来看LS估计量的一个性质:若每个predictor与的相关系的数绝对值相等,从此时开始,将所有系数的估计值同步地从0移向LS估计量,在这个过程中,每个predictor与残差向量的相关系数会同比例地减少。
假设我们标准化了每个predictor和,使他们均值为0,标准差为1。在这里的设定中,对于任意,都有,其中为常数。LS估计量,当我们将系数从0向移动了比例时,记拟合值为。
另外,记为只有第个元素为1、其他元素均为0的维向量,则,再记,记投影矩阵。
这里的问题是,在变大过程中,每一个与新的残差的相关系数,是否始终保持相等?且是否会减小?
由于,即内积与无关。再由可知。
相关系数的绝对值
因此,任意predictor与当前残差的相关系数绝对值,会随着的增加,同比例地减小,并且。
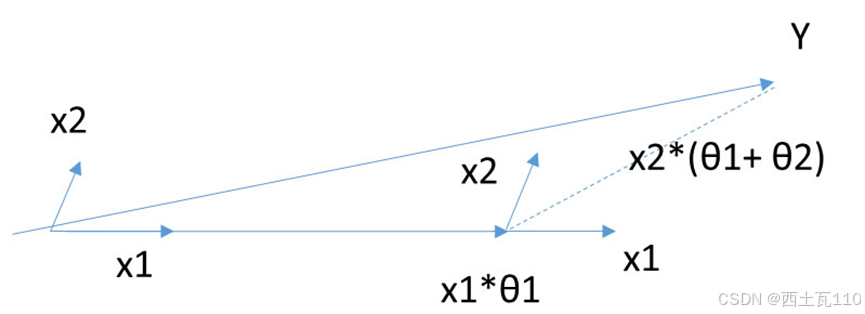
现在,我们再回顾一下LAR的过程。在第步开始时,将所有active set中的predictor的集合记为,此时在上一步估计完成的系数为,它是维且每个维度都非零的向量,记此时残差为,用对做回归后系数为,拟合值。另外,我们知道,而一个predictor加入的条件就是它与当前的相关系数的绝对值等于中的predictor与当前的相关系数的绝对值,所以向量的每个维度的绝对值都相等,也即′的每个维度的绝对值都相等,就是与各个中的predictor的角度都相等的向量,且与它们的角度是最小的,而也是下一步系数要更新的方向,这也是“最小角回归”名称的由来。
参数更新
那么,在这个过程中,是否需要每次都逐步小幅增加,再检查有没有其他predictor与残差的相关系数绝对值?有没有快速的计算的方法?答案是有的。
在第步的开始,中有个元素,我们记,其中,并记,此时的active set其实就是。在这里,我们将做个修改,记,再令。
此时更新方向为,并取。更新的规则为。因此,任一predictor,与当前残差的内积就为,而对于,有。
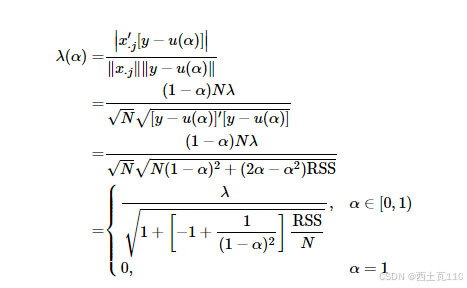
对于,如果要使与当前残差的相关系数绝对值,与在中的predictor与当前残差的相关系数绝对值相等,也即它们的内积的绝对值相等,必须要满足。问题转化为了求解使它们相等的,并对于所有的,最小的即为最后的更新步长。
由于,因此只需考虑与的大小关系即可。最后解为

注意到
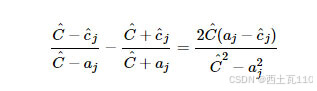
因此,当时,除非即,否则必有。反之,当时,除非即,否则必有。综上所述,上面的解可以写为
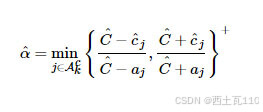
其中表示只对其中正的元素有效,而丢弃负的元素。
最小角回归算法代码实现
import numpy as np from sklearn.preprocessing import StandardScaler from sklearn.linear_model import Lars import matplotlib.pyplot as plt # 示例数据生成 np.random.seed(0) X = 2.5 - 1.5 * np.random.randn(100, 1) y = 1 + 2 * X + 0.5 * np.random.randn(100, 1) # 添加截距项 X = np.hstack([np.ones((100, 1)), X]) # 数据标准化 scaler = StandardScaler() X_scaled = scaler.fit_transform(X) # 创建LARS模型实例 lars = Lars() # 拟合模型 lars.fit(X_scaled, y) # 打印系数 print("Coefficients:", lars.coef_) # 绘制系数路径 plt.plot(lars.coef_, drawstyle="steps") plt.xlabel("Variables") plt.ylabel("Coefficient Value") plt.title("Coefficient Path of LARS") plt.show()最小角回归算法具有以下优缺点
优点:
- 高维数据处理:LAR算法特别适合于特征维度 n 远高于样本数 m 的情况,能够有效处理高维数据 。
- 计算效率:算法的最坏计算复杂度与最小二乘法类似,但计算速度几乎与前向选择算法一样快 。
- 系数路径:LAR算法可以产生分段线性结果的完整路径,这在模型的交叉验证中非常有用 。
- 稳定性:如果两个变量对响应有几乎相等的联系,则LAR算法会给予它们相似的系数增长率,这与我们的直觉判断一致,且更加稳定 。
- 灵活性:LAR算法容易修改并为其他估算器生成解,例如可以用于求解Lasso回归问题 。
缺点:
- 对噪声敏感:由于LAR算法的迭代方向是根据目标残差而定,因此该算法对样本的噪声非常敏感 。
- 实现复杂性:尽管算法本身在理论上具有吸引力,但在实际实现时可能较为复杂,特别是对于非专家用户 。
最小角回归算法的应用场景
- 高维数据回归问题:LAR算法特别适用于处理特征数量多于样本数量的高维数据集,能够有效地进行变量选择和回归分析 。
- 生物信息学:在生物信息学领域,LAR可以用于处理基因表达数据,识别重要的生物标记 。
- 金融分析:LAR在量化分析和风险预测中应用,帮助分析金融数据和预测市场趋势 。
- 信号处理:在信号处理领域,LAR可以用于信号恢复和噪声减少,提高信号的质量 。
- 大规模数据分析:对于特征众多的数据集,LAR进行有效的变量选择和数据压缩,简化模型并提高解释能力 。
- 特征选择:LAR算法提供了一种高效的特征选择方式,尤其在变量个数远大于样本数的情况下,能够快速识别出重要的特征 。
- 稳健性分析:LAR算法在变量选择上表现出较高的稳定性,对于高度相关的变量,提供了更加稳健的解决方案 。
- 教育和研究:在教育和研究领域,LAR算法被用于教学和研究项目,帮助学生和研究人员理解高维数据的回归分析方法 。
模型优化:通过使用网格搜索(GridSearchCV)和交叉验证的方法来精细调整LAR模型的参数,期望获得最佳的模型性能 。
