
阅读量:0
目录
一、实验目的
- 熟练掌握空域平滑滤波的原理、方法及其MATLAB实现。
- 分析模板大小对空域平滑滤波的影响,线性和非线性方法对空域平滑滤波增强效果的影响,比较不同滤波器的处理效果,分析其优缺点。
二、实验原理
1. 空域平滑滤波
空域平滑滤波是一种基本的图像处理技术,旨在降低图像中的噪声并模糊图像细节。其原理是基于图像中像素值的局部平均化或加权平均化来实现。
具体来说,平滑滤波器在图像上滑动,对每个像素周围邻域内的像素进行平均操作。这通常涉及将滤波器覆盖的像素值进行加权平均,得到一个新的像素值来代替原始像素值。平均操作有助于消除高频噪声,并使图像变得更加平滑。
在该实验中,用到的平滑滤波器为均值滤波器。
均值滤波器是一种常见的空域平滑滤波器,用于图像处理中的噪声抑制和平滑处理。其原理是在图像中滑动一个固定大小的滤波窗口,对窗口中的像素值进行平均操作,用平均值替代中心像素的值,适用于去除轻度噪声和平滑图像。
一般来说,对同一幅图像进行均值滤波器处理,尺寸越大的均值滤波器处理后的图像越模糊,设置分辨不出图像内容。但是,对于包含大量噪声或细节的图像,均值滤波器可能会导致图像过度模糊,因为它平均化了整个邻域内的像素。
2. 椒盐噪声的处理
对于包含大量噪声或细节的图像,比如含有“椒盐噪声”的图像,往往会采用中值滤波器。中值滤波器是一种非线性滤波器,在图像处理中常用于去除椒盐噪声或斑点噪声。与均值滤波器不同,中值滤波器不是对图像像素进行加权平均,而是将图像区域内像素值排序后选取中间值(中值)作为当前像素的新值。
虽然中值滤波器在处理去除椒盐噪声上有优势,但是,中值滤波器的处理速度较慢,特别是在处理大尺寸窗口或高分辨率图像时。另外,对于高斯噪声等连续性噪声,中值滤波器的去噪效果可能不如均值滤波器等线性滤波器。
三、实验内容
- 选择一幅图像,分别选择两种尺寸的算术平均模板进行均值滤波模糊处理,并对不同尺寸的滤波器模板操作后的图像进行比较。
- 选择一幅图像,对图像加入椒盐噪声,检验两种滤波模板(3×3平均模板和3×3中值滤波器)对噪声的滤波效果。
四、源程序和结果
(1) 主程序(matlab)
clear;close; % 读取彩色图片 img = imread('lena.jpg'); grayscale = rgb2gray(img); % 读取灰度图 % 显示原始图片 subplot(2, 2, 1); imshow(grayscale); title('原始图片'); % 1) 分别选择 3×3,7×7,25×25 等平均模板进行均值滤波 filter_sizes = [3, 7, 25]; for i = 1:numel(filter_sizes) filter_size = MeanKernel(filter_sizes(i)); filtered_grayscale = GrayscaleFilter(grayscale, filter_size); % 显示滤波后的图片 subplot(2, 2, i+1); imshow(filtered_grayscale); title(['均值滤波 ',num2str(filter_sizes(i)), 'x', num2str(filter_sizes(i))]); end % 2) 对图像加入椒盐噪声 noisy_grayscale = imnoise(grayscale, 'salt & pepper', 0.1); % 显示加入噪声的图片 figure; subplot(2, 2, 1); imshow(grayscale); title('原始图片'); % 显示加入噪声的图片 subplot(2, 2, 2); imshow(noisy_grayscale); title('添加椒盐噪声'); % 使用3x3平均模板进行滤波 avg_filtered_grayscale = GrayscaleFilter(noisy_grayscale, MeanKernel(3)); subplot(2, 2, 3); imshow(avg_filtered_grayscale); title('图像 3x3 均值滤波'); % 使用3x3中值滤波器进行滤波 med_filtered_grayscale = MedFilter(grayscale); subplot(2, 2, 4); imshow(med_filtered_grayscale); title('图像 3x3 中值滤波');(2) 函数GrayscaleFilter
% 功能:输入灰度图和滤波核,输出滤波图像 function filtered_image = GrayscaleFilter(gray_image, filter_kernel) % 读取行列值 [rows, cols] = size(gray_image); [krows, kcols] = size(filter_kernel); % 计算边界填充(零填充) pad_rows = floor(krows/2); pad_cols = floor(kcols/2); padded_image = zeros(rows + 2*pad_rows, cols + 2*pad_cols); padded_image(pad_rows+1:end-pad_rows, pad_cols+1:end-pad_cols) = gray_image; % 对图像进行滤波 filtered_image = zeros(rows, cols); for i = 1:rows for j = 1:cols patch = padded_image(i:i+krows-1, j:j+kcols-1); filtered_image(i, j) = sum(patch(:) .* filter_kernel(:)); % 卷积运算 end end % 还原到0~255的灰度像素范围 filtered_image = uint8(filtered_image); end(3) 函数MeanKernel
function mean_filter = MeanKernel(x) % 定义均值滤波器 mean_filter = 1/(x*x) * ones(x, x); end(4) 函数MedFilter
% 功能:3*3中值滤波器滤波 function filtered_image = MedFilter(gray_image) [m, n] = size(gray_image); filtered_image = gray_image; for i = 2:m-1 for j = 2:n-1 % 获取3x3邻域内的像素值 neighborhood = gray_image(i-1:i+1, j-1:j+1); % 计算邻域内像素值的中值作为当前像素值 filtered_image(i, j) = median(neighborhood(:)); end end五、结果分析
1. 空域平滑滤波
如图一所示,均值滤波器滤波后的图像会变模糊,且会滤波核的大小的增大而变得更模糊。

图一 均值滤波
2. 椒盐噪声的处理
如图二所示,布满椒盐噪声的图片整幅图像充满了黑白点。对于这类噪声的处理,使用均值滤波器滤波后的图像,得益于均值滤波器的模糊效果,黑白点确实没那么明显突出了,但是效果还是不尽人意,一方面噪声又没完全剔除,另一方面原本图像的细节也被模糊了。而观察中值滤波后的图像,可以惊讶的发现,滤波后的图像基本上和原图一样,看不出什么差别出来。由此空间,中值滤波器对椒盐噪声的剔除有奇效,十分适合这种场景。
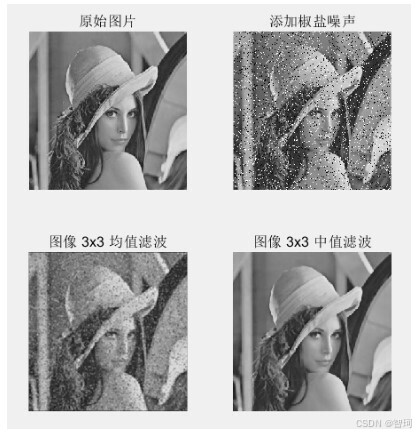
图二 椒盐噪声处理
