
阅读量:0
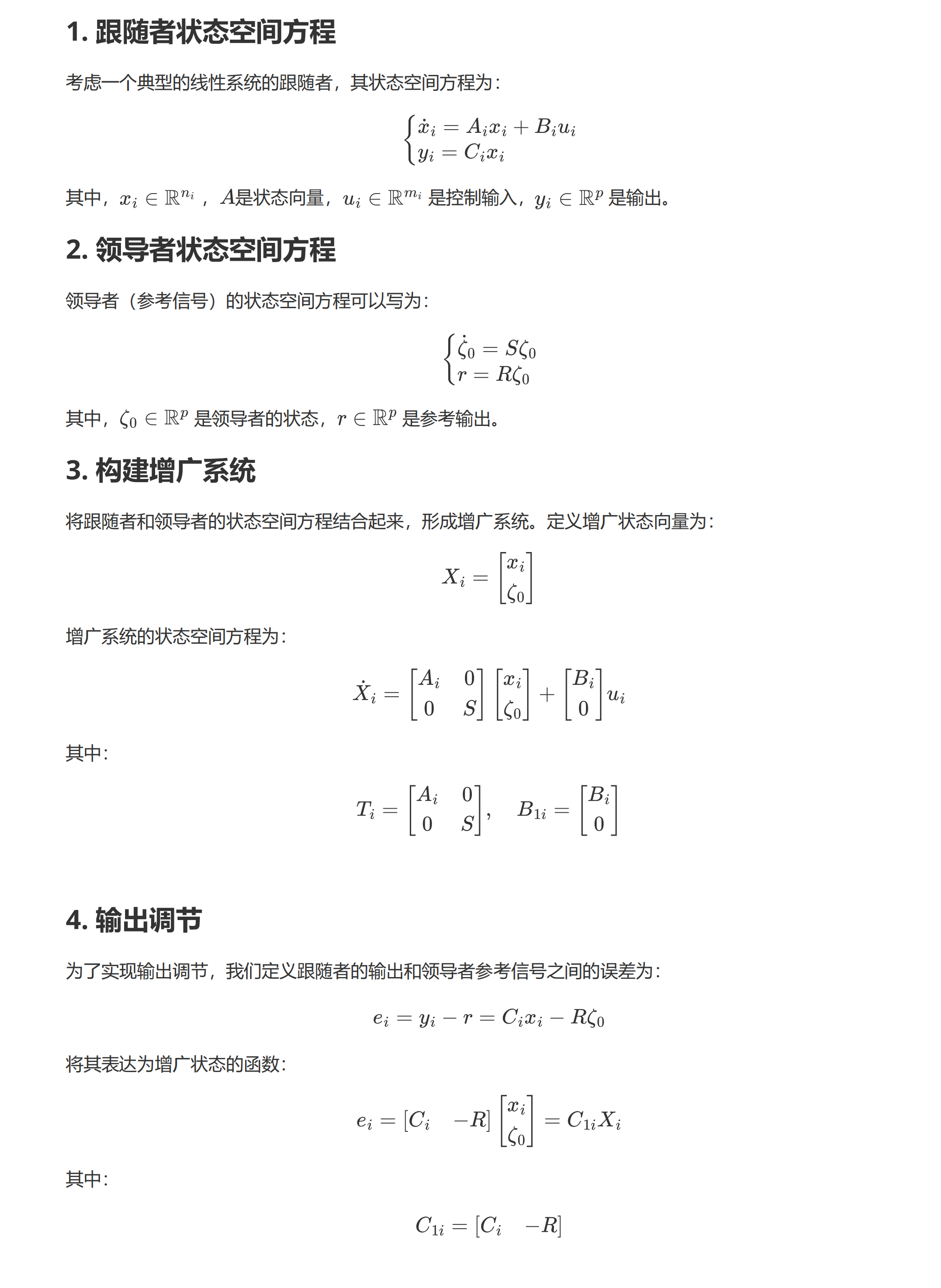
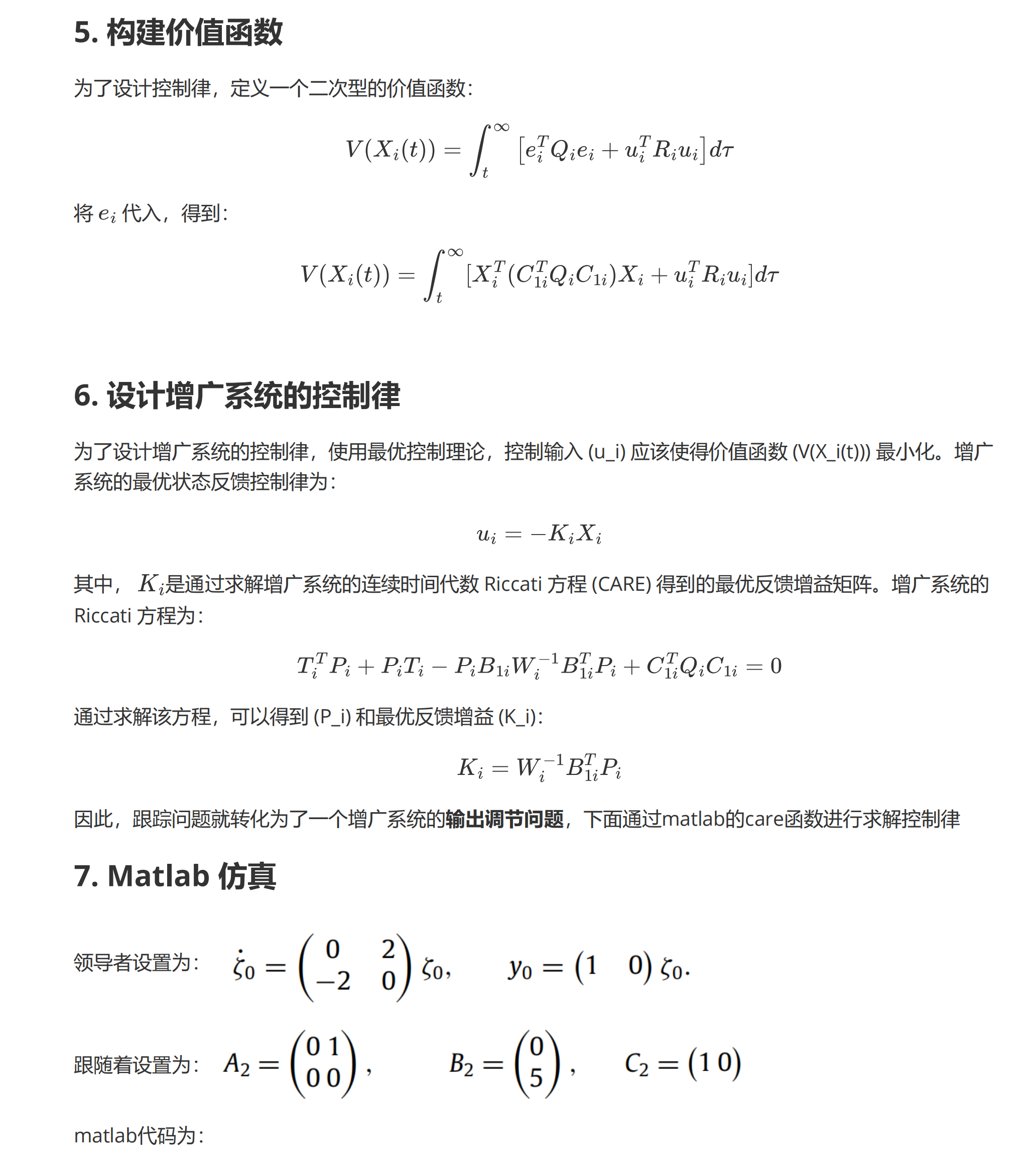
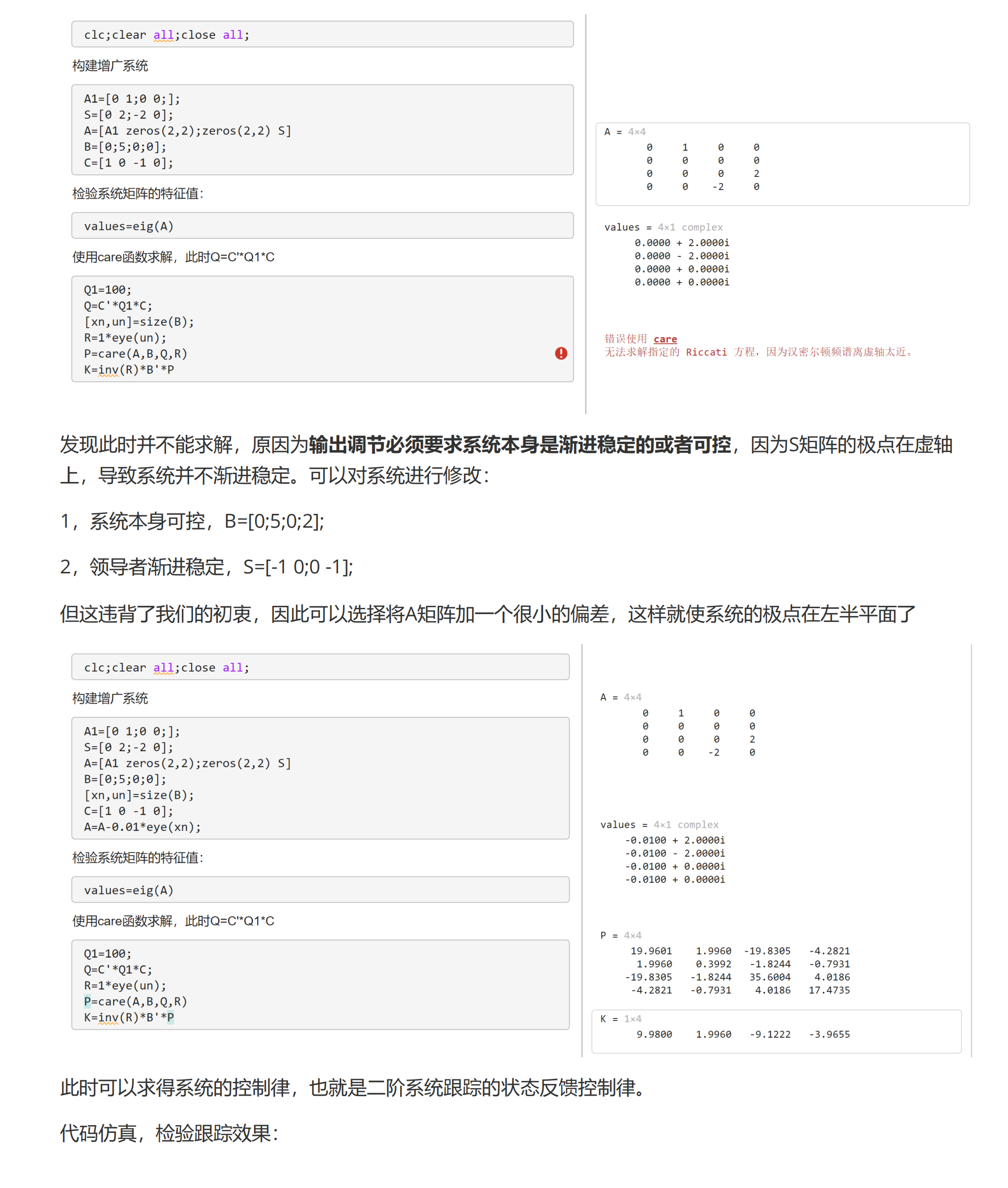
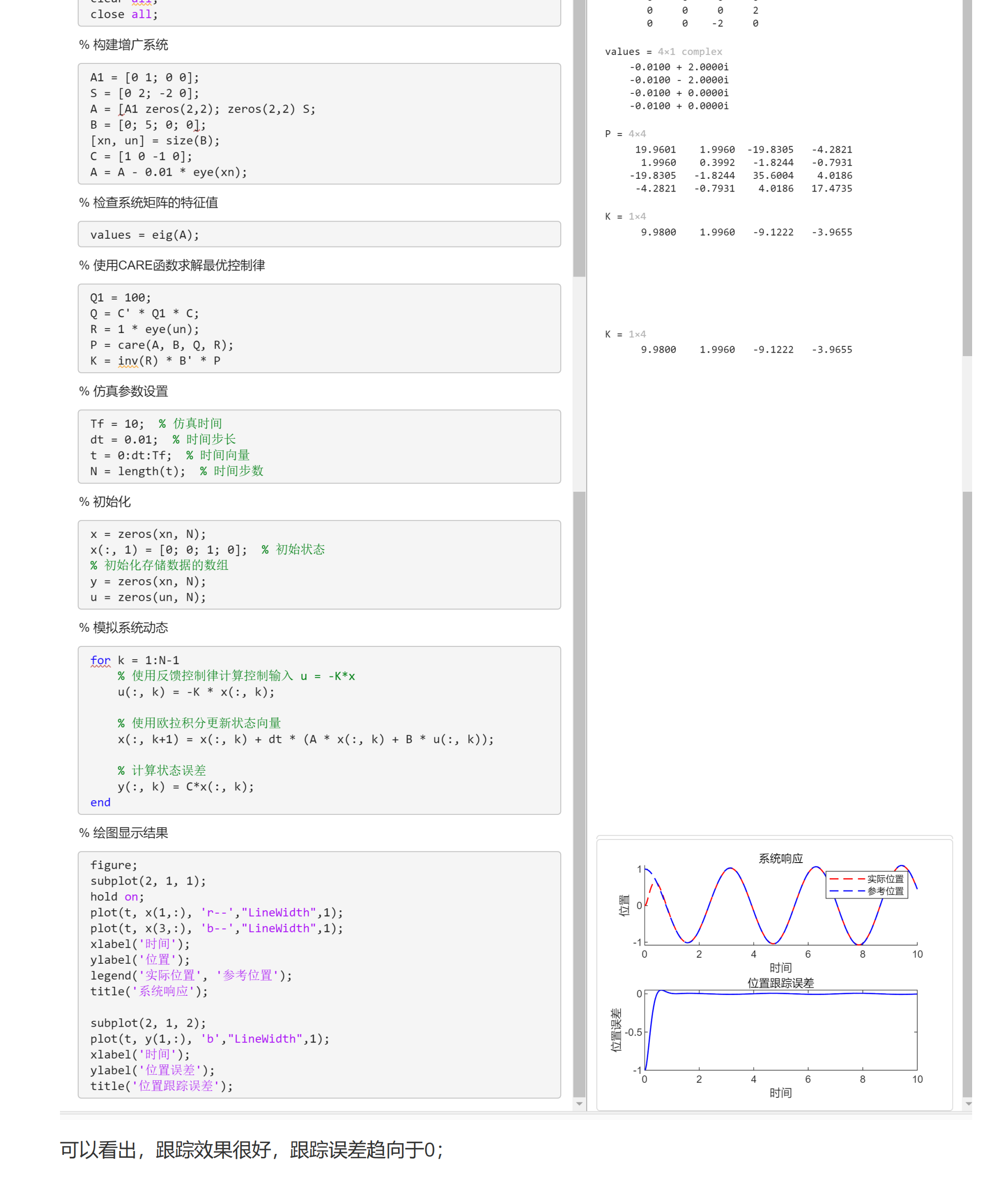
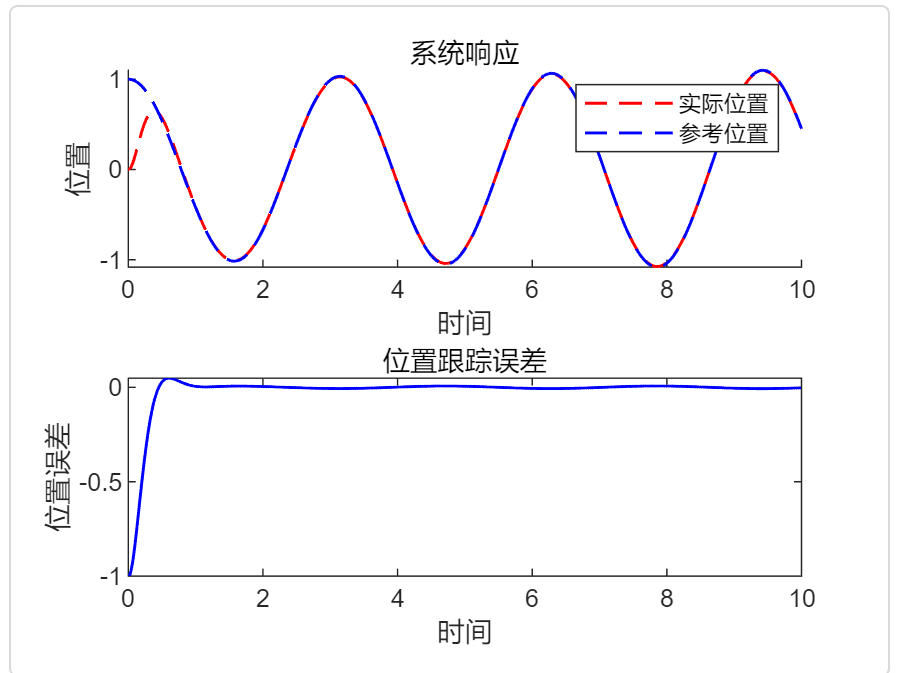
本文研究了一种基于增广系统的领导者-跟随者控制框架,旨在实现跟随者系统对领导者参考信号的精确跟踪。首先,建立了跟随者和领导者的独立状态空间方程,分别描述了它们的动态行为和输出关系。随后,通过将两者的状态空间方程结合成增广系统,定义了增广状态向量和相应的控制输入。为实现输出调节,定义了跟随者输出与领导者参考信号之间的误差,并将其转化为增广状态向量的函数形式。设计了基于二次型价值函数的最优控制律,通过求解增广系统的代数Riccati方程获得最优反馈增益矩阵。最后,通过Matlab仿真验证了所提出控制框架的有效性和稳定性,展示了跟随者系统对领导者参考信号的准确跟踪能力。
关键词:增广系统;领导者-跟随者控制;状态空间方程;最优控制律;Matlab仿真
代码和文章下载:
https://download.csdn.net/download/weixin_44346182/89543111?spm=1001.2101.3001.9500
