阅读量:2


💐前言
前天,我们学习了Dijkstra算法:【最短路算法】一篇文章彻底弄懂Dijkstra算法|多图解+代码详解
Dijstra算法用于计算单源、正权边的最短路问题
今天学习的贝尔曼福特算法,是用于计算单源,且可含负权边的最短路问题
目录
🌻一、Bellman-Ford算法简介
- 用于求解单源、有负权边的最短路问题
- 实现通过m次迭代求出从起点到终点不超过m条边构成的最短路径
- 其优于Dijkstra的方面是边的权值可以为负数、实现简单,缺点是时间复杂度过高。时间复杂度是O(nm)
🍼与迪杰斯特拉算法的区别:
迪杰斯特拉算法是借助贪心思想,每次选取一个未处理的最近的结点,去对与他相连接的边进行松弛操作;贝尔曼福特算法是直接对所有边进行N-1遍松弛操作。
迪杰斯特拉算法要求边的权值不能是负数;贝尔曼福特算法边的权值可以为负数,并可检测负权回路。
名词解释:
1. 松弛操作:不断更新最短路径和前驱结点的操作。
2. 负权回路:绕一圈绕回来发现到自己的距离从0变成了负数,到各结点的距离无限制的降低,停不下来
🌻二、算法思路
🛫思路
初始化源点s到各个点v的路径dis[v] = ∞,dis[s] = 0。
进行n - 1次遍历,每次遍历对所有边进行松弛操作,满足则将权值更新。
松弛操作:以a为起点,b为终点,ab边长度为w为例。dis[a]代表源点s到a点的路径长度,dis[b]代表源点s到b点的路径长度。如果满足下面的式子则将dis[b]更新为dis[a] + w。
dis[b] > dis[a] + w遍历都结束后,若再进行一次遍历,还能得到s到某些节点更短的路径的话,则说明存在负环路。
🌱算法模板
int n, m; // n表示点数,m表示边数 int dist[N]; // dist[x]存储1到x的最短路距离 struct Edge // 边,a表示出点,b表示入点,w表示边的权重 { int a, b, w; }edges[M]; // 求1到n的最短路距离,如果无法从1走到n,则返回-1。 int bellman_ford() { memset(dist, 0x3f, sizeof dist); dist[1] = 0; // 如果第n次迭代仍然会松弛三角不等式,就说明存在一条长度是n+1的最短路径,由抽屉原理,路径中至少存在两个相同的点,说明图中存在负权回路。 for (int i = 0; i < n; i ++ ) { for (int j = 0; j < m; j ++ ) { int a = edges[j].a, b = edges[j].b, w = edges[j].w; if (dist[b] > dist[a] + w) dist[b] = dist[a] + w; } } if (dist[n] > 0x3f3f3f3f / 2) return -1; return dist[n]; } 总结
Bellman-ford算法的思路也很简单,直接就是两层循环,内层循环所有边,外层循环就是循环所有边的次数,这个外层循环次数一般是题目控制的。时间复杂度是O(n*m)
🚏注意点
- 循环n次之后对所有的边一定满足
dist[b]<=dist[a]+w,这个叫”三角不等式” - 如果图中经过源点到目的点,有负权回路的话,最短路就不一定存在了
- 💥迭代次数是有实际意义的,比如我们迭代了k次,那么我们求的最短距离就是从源点点经过不超过k条边走到n号点的最短距离;所以在第n次迭代的时候又更新了某些边的话,就说明路径中一定存在环,并且是负权回路。因为第n次迭代在不存在负权回路的情况下是遍历到第n号点了,后面是没有点了,如果还能更新,说明路径中存在回路,而且是负权回路。
🌻二、算法原理
🥘核心思想: 松弛操作
松弛法(relaxation)是一数学术语,描述的是一些求解方法,这些方法会通过逐步接近的方式获得相关问题的最佳解法。每运用一次松弛法就好像我们“移动”了一次,而我们要做的就是在尽可能少的移动次数内找到最佳解决方案。
👩🏫为啥能求最短路?为啥迭代次数有意义?
首先,Bellman算法的核心是松驰,和Dijsktra算法不一样,Djikstra算法是松驰+贪心(,其实质就是在问相应边对面的顶点————“你能够被改进(更短)吗?”)
最短路算法的本质,都是在研究 松驰的顺序!通过不断的松驰,最终求得每个顶点的最短路
- Dijkstra松驰顺序,是依次松驰距离源点距离最短的未被处理过的点与之相连的顶点。是以一种贪心策略进行松驰的。这种特点导致,一旦某个顶点被处理过(即对与它相连的顶点进行松驰),那么后面该顶点自己被松驰,但是与它相连的顶点不能因为它的松驰而松驰,导致出现不准确的结果。(当边全为正,是不会出现这种情况,因为在松驰与该顶点相连的顶点时,这种算法已经保证了该点已经被松驰到极限)。
- Bellman算法的核心就是松驰,没有贪心策略,也使它的时间复杂度比较高。因为它是单纯的松驰。首先我们要明白的是:如果处于第n层的节点,在它上一层的即n-1层所以节点的dist已经确定为最终真实值,那么通过一次遍历,第n层节点的dist也能被确定为最终真实值。第一次迭代,获得的信息是:与源点相邻点的真正dist(第二层节点),(其他点的可能仍为无穷大,或者为松驰一次状态);第二次循环,因为第二层的信息已经完全掌握,此次迭代是能确定第三层节点(从源点出发,经过2条边)的点的真实最短距离。(由于遍历的过程中,只完全掌握了第一层,其他节点的dist不能完全确定为最终的dist);如此循环,遍历n-1次,第n层的节点已经遍历完,至此,所有节点的dist都最终确定了(解释了为啥能求最短路)。
- 经过上面的分析,可以得出,bellman的松驰顺序是的策略是,暴力遍历,无脑松驰。
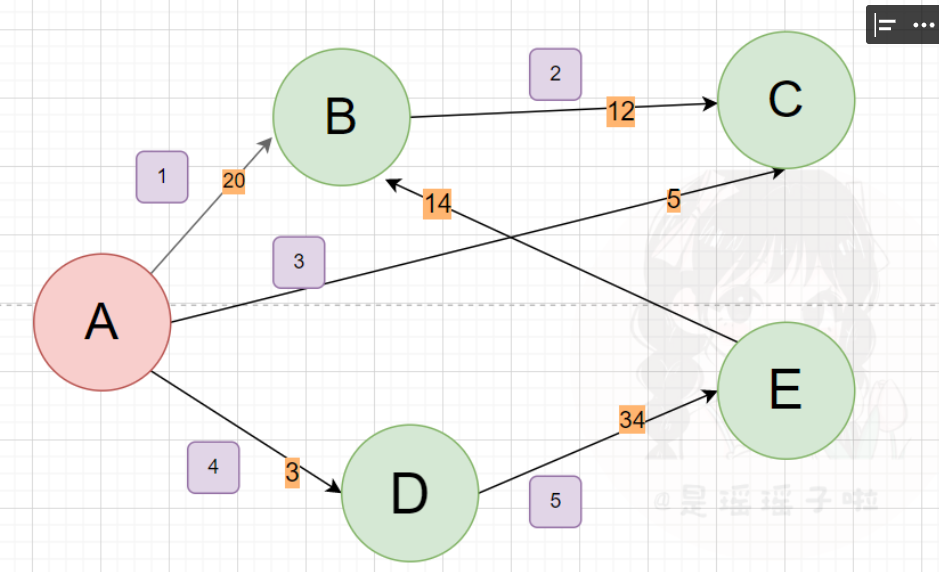
- 图解
👩🏫串联问题
串联问题一般发生在求解有边数限制的最短路问题中(下面有例题),这里我们主要讲一下原理和解决办法
其实理解了上面的过程,串联也好解释。因为在遍历的过程中,虽然说第二层的节点的dist可能任然为初始化的正无穷,但是由于第一层的更新和第二层的更新是同时的,很有可能更新完某个第一层节点,恰好后面去更新与它相连的第二层节点,那么该第二层节点的dist由于第一层节点的更新也更新了(如果该第二层节点同时也是处于第一层位置),看下面例子
防止串联,其实就是防止在第k次循环,更新k+1层节点时,由于k+1层节点的更新和确定,以k+1更新后的结果为基础松驰了与之相连的下一层的某个节点。!
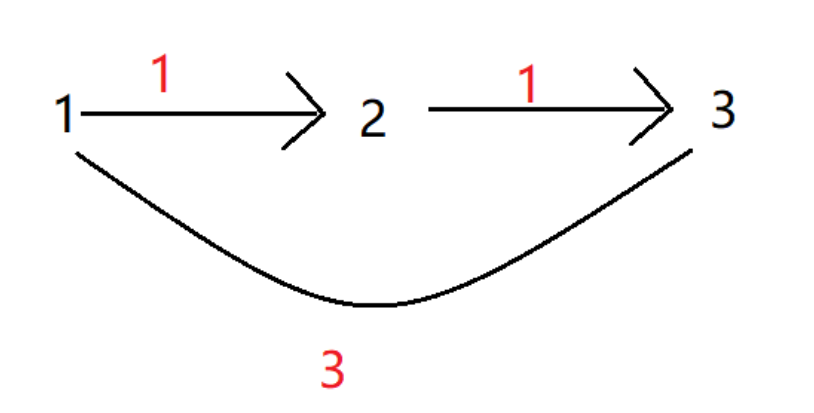
可以发现,如果我们没有备份上一次的dist数组的话,限制从1出发不超过1条边到3最短距离本应该是3,但变成了2。内层循环只迭代了一次,但是在更新的过程中会发生”串联”
为什么是发生呢?我们来分析一下假设每次迭代,遍历所有边,遍历边的顺序如下:
1→2, 1→3, 2→3
遍历完第一条边dist[2] = 1,遍历完第二条边dist[3] = 3,遍历第三条边,由于1→2的dist已经确定,在掌握这个信息的前提下,发生串联,dist[3]可以直接松驰,更新为dist[3] = 2,但这不是我们想要的答案。我们想要的是:迭代k次,得到从源点出发,不超过k条边的最短路。
怎么保证不发生串联呢?我们保证更新的时候只用上一次循环的结果就行。所以我们先备份一下。备份之后backup数组存的就是上一次循环的结果,我们用上一次循环的结果来更新距离。所以我们这样写dist[b]=min(dist[b],backup[a]+w)来更新距离,而不是dist[b]=min(dist[b],dist[a]+w),这样写就会发生上面说的”串联”现象。
假如我们现在是第k次迭代,那么backup保留的是第k-1次迭代后获得的信息。在这个例子中,backup保留的是没有迭代之前(比如站在3的视角,它不会知道1→2的距离,即使1→2的距离在2→3之前更新,这样就不会因为1→2dist的确定,而串联确定2→3)
🌻三、加深理解-题目训练
bellman-ford算法虽然时间复杂度比较高,但它独特的性质(本质上还是松驰顺序),使它非常适合做:有限制边数的最短路。因为上面已经讲到,它的迭代次数是有意义的,第k次迭代,在防止串联的情况下,代表从源点出发,经过不超过k条边,所经过的顶点距离源点的最短距离被百分之百确定好了。
AcWing 853. 有边数限制的最短路
给定一个 n 个点 m 条边的有向图,图中可能存在重边和自环, 边权可能为负数。
请你求出从 1 号点到 n 号点的最多经过 k 条边的最短距离,如果无法从 1 号点走到 n 号点,输出 impossible。
注意:图中可能 存在负权回路 。
输入格式
第一行包含三个整数 n,m,k。
接下来 m 行,每行包含三个整数 x,y,z,表示存在一条从点 x 到点 y 的有向边,边长为 z。
点的编号为 1∼n。
输出格式
输出一个整数,表示从 1 号点到 n 号点的最多经过 k 条边的最短距离。
如果不存在满足条件的路径,则输出 impossible。
数据范围
1≤n,k≤500,
1≤m≤10000,
1≤x,y≤n,
任意边长的绝对值不超过 10000。
输入样例:
3 3 1 1 2 1 2 3 1 1 3 3 输出样例:
3 👩🏫详细注释题解
#include <cstring> #include <iostream> #include <algorithm> using namespace std; const int N = 510, M = 10010;//最大点数和边数 int n,m,k;//实际点数和边数 int dist[N],last[N];//备份数组,作用是防止串联 struct Edge{ int a,b,w;//存a->b权重是w的边 }edges[M];//结构体数组,用来存边 void bellman_ford(){ memset(dist,0x3f,sizeof(dist));//初始化dist数组 dist[1] = 0; for(int i = 0; i < k; i ++){ memcpy(last, dist, sizeof(dist));//备份数组,备份上次迭代的dist数组 for (int j = 0; j < m; j++){//遍历所有边 auto e = edges[j]; dist[e.b] = min(dist[e.b],last[e.a] + e.w);//松驰操作 } } } int main(){ scanf("%d%d%d",&n,&m,&k);//n个顶点,m条边,k是限制边数 for(int i = 0; i < m; i++){ int a,b,w; scanf("%d%d%d",&a,&b,&w); edges[i] = {a,b,w}; } bellman_ford(); if(dist[n] > 0x3f3f3f3f / 2) puts("impossible"); else printf("%d\n",dist[n]); return 0; } - 在上面代码中,是否能到达n号点的判断中需要进行if(dist[n] > INF/2)判断,而并非是if(dist[n] == INF)判断,原因是INF是一个确定的值,并非真正的无穷大,会随着其他数值而受到影响,dist[n]大于某个与INF相同数量级的数即可