
阅读量:4
前言
有需要帮忙代做51和32小车或者其他单片机项目,课程设计,报告,PCB原理图的小伙伴,可以在文章最下方加我V交流咨询,本篇文章的小车所有功能实现的代码还有硬件清单放在资源包里,有需要的自行下载即可!
目录
1.电机模块开发
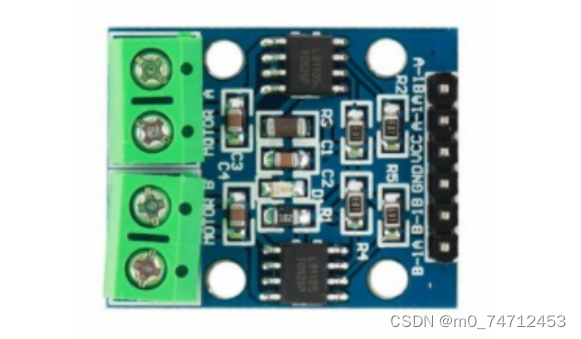
L9110s概述
接通VCC,GND 模块电源指示灯亮, 以下资料来源官方,具体根据实际调试
IA1输入高电平,IA1输入低电平,【OA1 OB1】电机正转;
IA1输入低电平,IA1输入高电平,【OA1 OB1】电机反转;
IA2输入高电平,IA2输入低电平,【OA2 OB2】电机正转;
IA2输入低电平,IA2输入高电平,【OA2 OB2】电机反转;
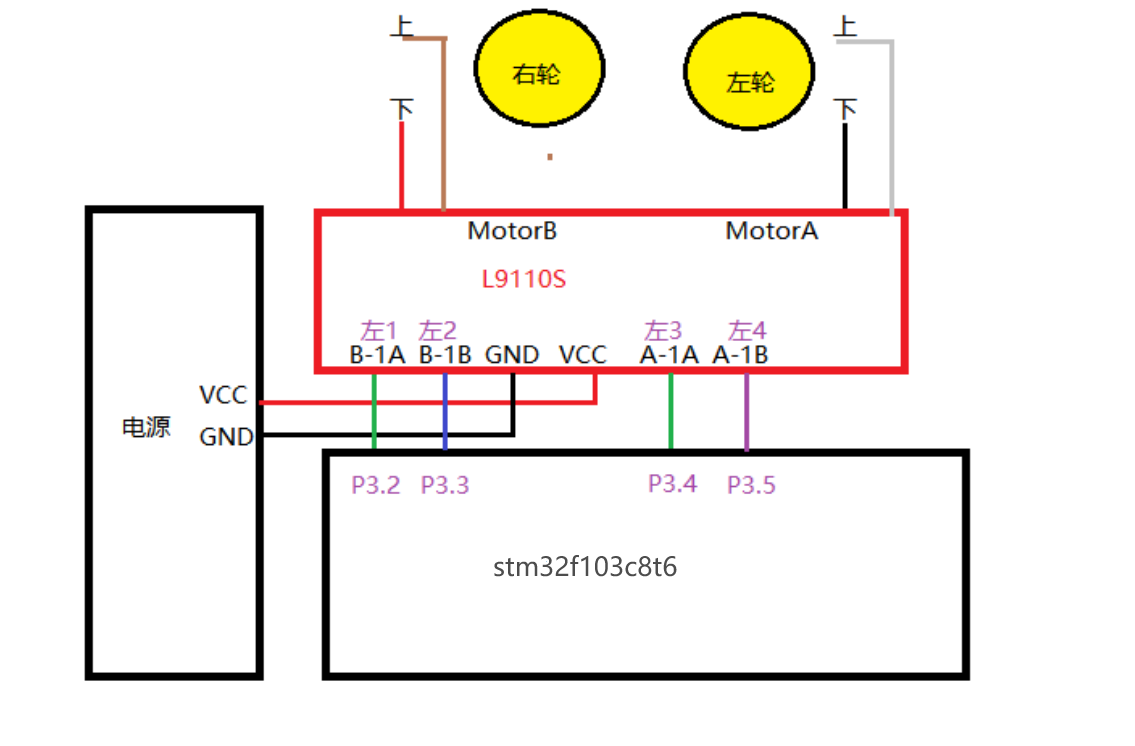
接线参考:
B-1A -- PA0
B-1B -- PB1
A-1A -- PA1
A-1B -- PB10
1.1 让小车动起来
代码实现:
motor.c
#include "motor.h" void goForward(void) { // 左轮 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_RESET); // 右轮 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET); } void goBack(void) { // 左轮 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_SET); // 右轮 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_SET); } void goLeft(void) { // 左轮 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_RESET); // 右轮 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET); } void goRight(void) { // 左轮 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_RESET); // 右轮 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET); } void stop(void) { // 左轮 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_2, GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_10, GPIO_PIN_SET); // 右轮 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0, GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET); }motor.h
#ifndef __MOTOR_H__ #define __MOTOR_H__ #include "main.h" void goForward(void); void goBack(void); void goLeft(void); void goRight(void); void stop(void); #endifmain.c
#include "motor.h" //main函数的while循环部分: while (1) { goForward(); HAL_Delay(1000); goBack(); HAL_Delay(1000); goLeft(); HAL_Delay(1000); goRight(); HAL_Delay(1000); stop(); HAL_Delay(1000); } 1.2 串口控制小车方向
- 串口分文件编程进行代码整合——通过现象来改代码
- 接入蓝牙模块,通过蓝牙控制小车
- 添加点动控制,如果APP支持按下一直发数据,松开就停止发数据(蓝牙调试助手的自定义按键不 能实现),就能实现前进按键按下后小车一直往前走的功能
代码实现:
usart.c
#include "usart.h" #include "string.h" #include "stdio.h" #include "motor.h" //串口接收缓存(1字节) uint8_t buf=0; //定义最大接收字节数 200,可根据需求调整 #define UART1_REC_LEN 200 // 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节 uint8_t UART1_RX_Buffer[UART1_REC_LEN]; // 接收状态 // bit15, 接收完成标志 // bit14, 接收到0x0d // bit13~0, 接收到的有效字节数目 uint16_t UART1_RX_STA=0; #define SIZE 12 char buffer[SIZE]; // 接收完成回调函数,收到一个数据后,在这里处理 void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { // 判断中断是由哪个串口触发的 if(huart->Instance == USART1) { // 判断接收是否完成(UART1_RX_STA bit15 位是否为1) if((UART1_RX_STA & 0x8000) == 0) { // 如果已经收到了 0x0d (回车), if(UART1_RX_STA & 0x4000) { // 则接着判断是否收到 0x0a (换行) if(buf == 0x0a) { // 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1 UART1_RX_STA |= 0x8000; // 灯控指令 if(!strcmp(UART1_RX_Buffer, "M1")) goForward(); else if(!strcmp(UART1_RX_Buffer, "M2")) goBack(); else if(!strcmp(UART1_RX_Buffer, "M3")) goLeft(); else if(!strcmp(UART1_RX_Buffer, "M4")) goRight(); else stop(); memset(UART1_RX_Buffer, 0, UART1_REC_LEN); UART1_RX_STA = 0; } else // 否则认为接收错误,重新开始 UART1_RX_STA = 0; } else // 如果没有收到了 0x0d (回车) { //则先判断收到的这个字符是否是 0x0d (回车) if(buf == 0x0d) { // 是的话则将 bit14 位置为1 UART1_RX_STA |= 0x4000; } else { // 否则将接收到的数据保存在缓存数组里 UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf; UART1_RX_STA++; // 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收 if(UART1_RX_STA > UART1_REC_LEN - 1) UART1_RX_STA = 0; } } } // 重新开启中断 HAL_UART_Receive_IT(&huart1, &buf, 1); } } int fputc(int ch, FILE *f) { unsigned char temp[1]={ch}; HAL_UART_Transmit(&huart1,temp,1,0xffff); return ch; }1.3 如何进行小车PWM调速
原理:
全速前进是LeftCon1A = 0; LeftCon1B = 1;
完全停止是LeftCon1A = 0;LeftCon1B = 0;
那么单位时间内,比如20ms, 有15ms是全速前进,5ms是完全停止, 速度就会比5ms全速前进,15ms完全停止获得的功率多,相应的速度更快!
开发:借用PWM的舵机控制代码
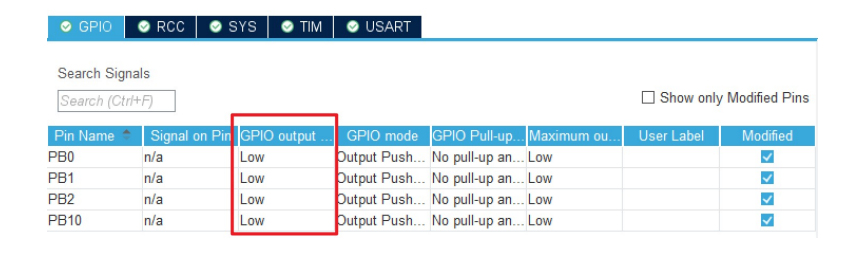
将控制车轮的4个 GPIO 口配置修改如下,否则小车动不起来。
原因:L9110每个控制口需要一高一低才可以动起来,如果PWM有效电平为高电平,则另一个 GPIO口则需要输出低电平才可以驱动轮子。
代码实现:
main.c
// main函数里 HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1); HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2); while (1) { __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, 8); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, 8); HAL_Delay(1000); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, 10); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, 10); HAL_Delay(1000); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1, 15); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2, 15); HAL_Delay(1000); }1.4 PWM方式实现小车转向
右转原理: 左轮速度大于右轮
左转原理: 右轮速度大于左轮
左右轮各自调速代码实现:
// main函数里 while (1) { __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,8); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,15); HAL_Delay(1000); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,15); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,8); HAL_Delay(1000); }2.循迹小车
2.1 循迹模块介绍
- TCRT5000传感器的红外发射二极管不断发射红外线
- 当发射出的红外线没有被反射回来或被反射回来但强度不够大时
- 红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态
- 被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和
- 此时模块的输出端为低电平,指示二极管被点亮
- 总结就是一句话,没反射回来,D0输出高电平,灭灯
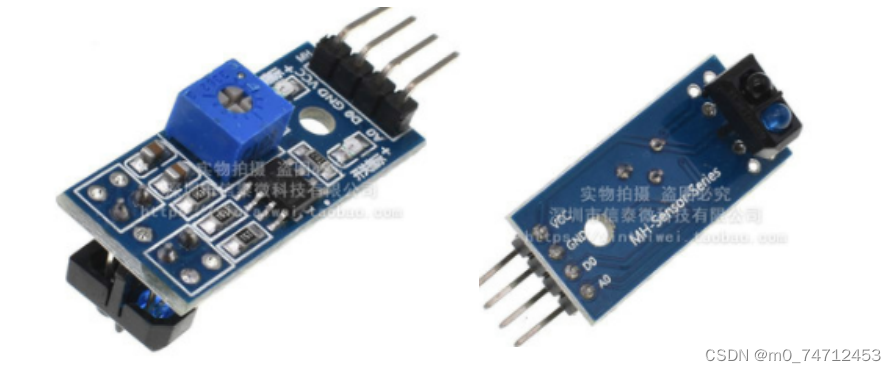
接线方式
- VCC:接电源正极(3-5V)
- GND:接电源负极 DO:TTL开关信号输出0、1
- AO:模拟信号输出(不同距离输出不同的电压,此脚一般可以不接)
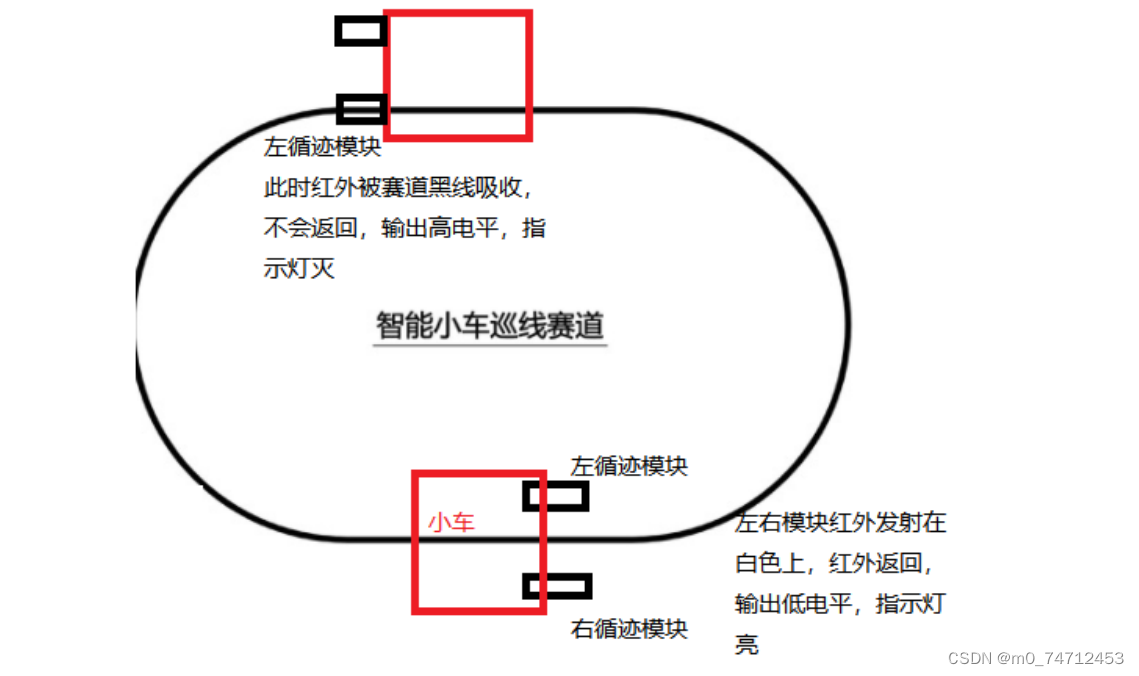
2.2 循迹小车原理
由于黑色具有较强的吸收能力,当循迹模块发射的红外线照射到黑线时,红外线将会被黑线吸收,导致 循迹模块上光敏三极管处于关闭状态,此时模块上一个LED熄灭。在没有检测到黑线时,模块上两个LED常亮
总结就是一句话,有感应到黑线,D0输出高电平 ,灭灯
2.3 循迹小车核心代码
硬件接线
- B-1A -- PA0
- B-1B -- PB1
- A-1A -- PA1
- A-1B -- PB10
- 循迹模块(左)-- PB3
- 循迹模块(右) -- PB4
代码示例:
#define LeftWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_3) #define RightWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_4) // main函数里 while (1) { if (LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_RESET) goForward(); if (LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_RESET) goLeft(); if (LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_SET) goRight(); if (LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_SET) stop(); }2.4 循迹小车解决转弯平滑问题
原理:两轮都有速度且一轮速度大于另一轮
代码实现:
#define LeftWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_3) #define RightWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_4) // main函数里 while (1) { if(LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_RESET) { __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,19); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,19); } if(LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_RESET) { __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,15); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,8); } if(LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_SET) { __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,8); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,15); } if(LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_SET) { __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,0); __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,0); } }3.跟随/避障小车
3.1 红外壁障模块分析
原理和循迹是一样的,循迹红外观朝下,跟随朝前
3.2 跟随小车的原理
- 左边跟随模块能返回红外,输出低电平,右边不能返回,输出高电平,说明物体在左边,需要左转
- 右边跟随模块能返回红外,输出低电平,左边不能返回,输出高电平,说明物体在右边,需要右转
3.3 跟随小车开发和调试代码
硬件接线
- B-1A -- PB0
- B-1B -- PB1
- A-1A -- PB2
- A-1B -- PB10
- 跟随模块(左) -- PB5
- 跟随模块(右) -- PB6
代码示例:
#define LeftWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_5) #define RightWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_6) // main函数里 while (1) { if(LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_RESET) goForward(); if(LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_RESET) goRight(); if(LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_SET) goLeft(); if(LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_SET) stop(); } 3.4 超声波模块介绍
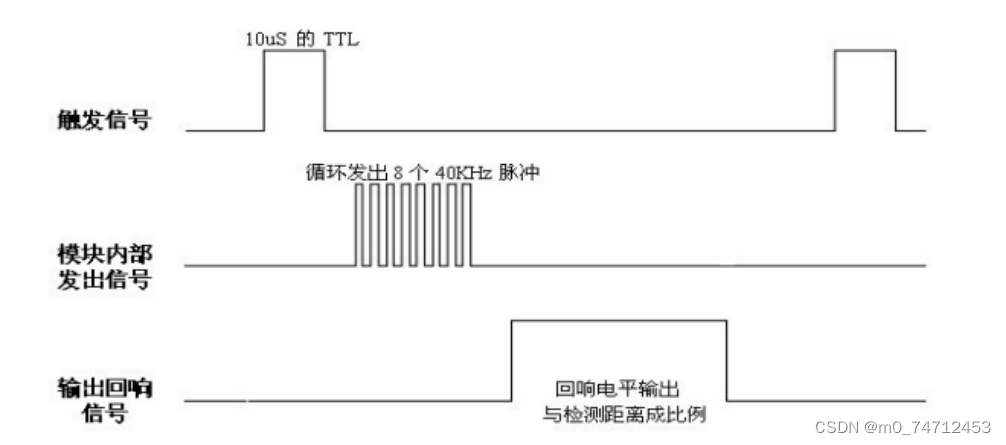
使用超声波模块,型号:HC-SR04

- 怎么让它发送波 Trig ,给Trig端口至少10us的高电平
- 怎么知道它开始发了 Echo信号,由低电平跳转到高电平,表示开始发送波
- 怎么知道接收了返回波 Echo,由高电平跳转回低电平,表示波回来了
- 怎么算时间 Echo引脚维持高电平的时间! 波发出去的那一下,开始启动定时器 波回来的拿一下,我们开始停止定时器,计算出中间经过多少时间
- 怎么算距离 距离 = 速度 (340m/s)* 时间/2
时序图:
3.5 舵机模块介绍
1. 什么是舵机
如下图所示,最便宜的舵机sg90,常用三根或者四根接线,黄色为PWM信号控制 用处:垃圾桶项目开盖用、智能小车的全比例转向、摄像头云台、机械臂等 常见的有0-90°、0-180°、0-360°

2. 怎么控制舵机
向黄色信号线“灌入”PWM信号
PWM波的频率不能太高,大约50HZ,即周期=1/频率=1/50=0.02s,20ms左右
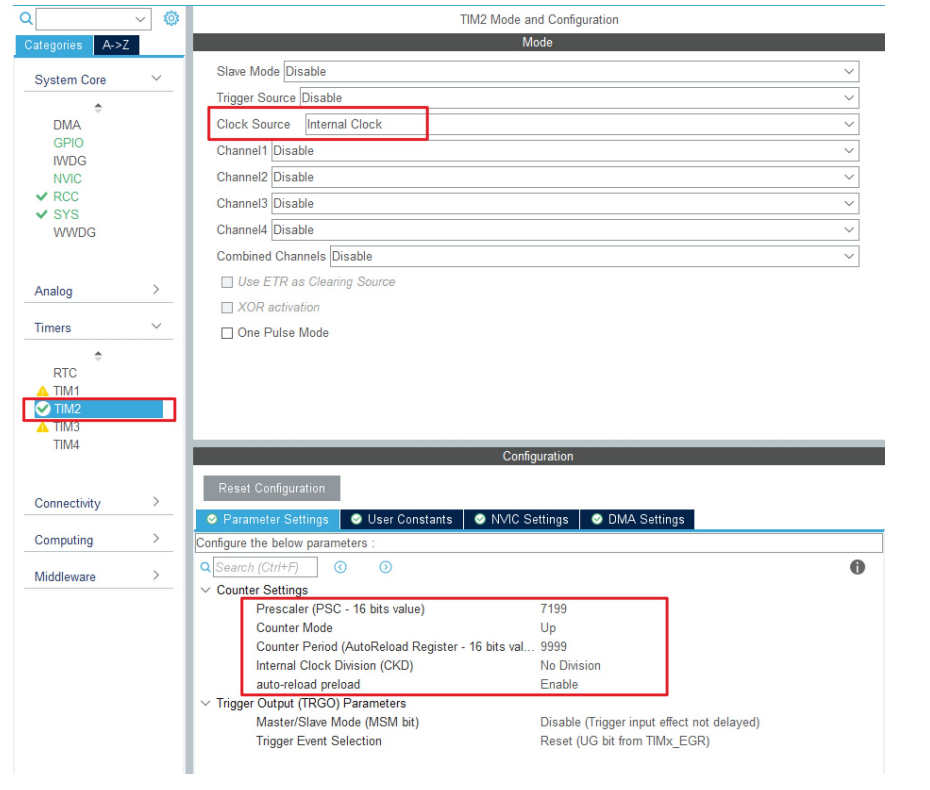
确定周期/频率:
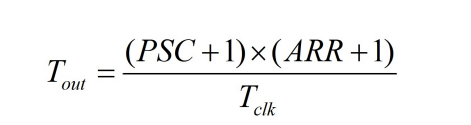
如果周期为20ms,则 PSC=7199,ARR=199
角度控制
0.5ms-------------0度; 2.5% 对应函数中CCRx为5
1.0ms------------45度; 5.0% 对应函数中CCRx为10
1.5ms------------90度; 7.5% 对应函数中CCRx为15
2.0ms-----------135度; 10.0% 对应函数中CCRx为20
2.5ms-----------180度; 12.5% 对应函数中CCRx为25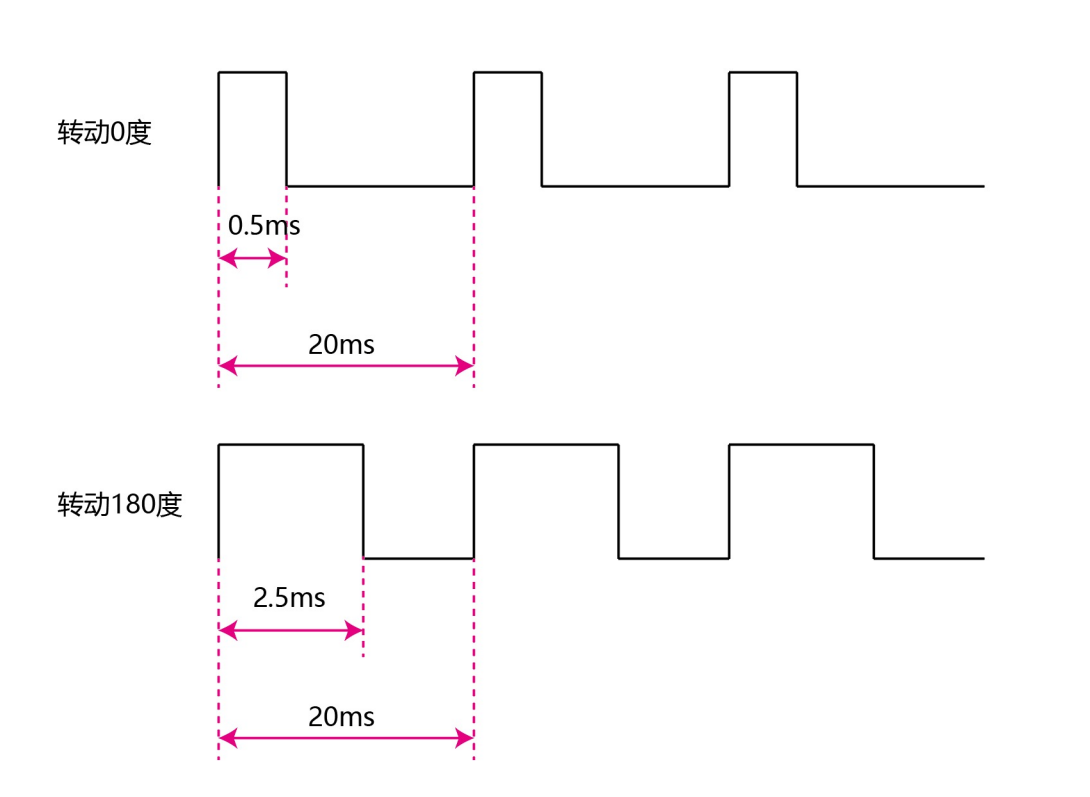
3.6 摇头避障小车开发和调试代码
硬件接线
- sg90 -- PB9
cubeMX配置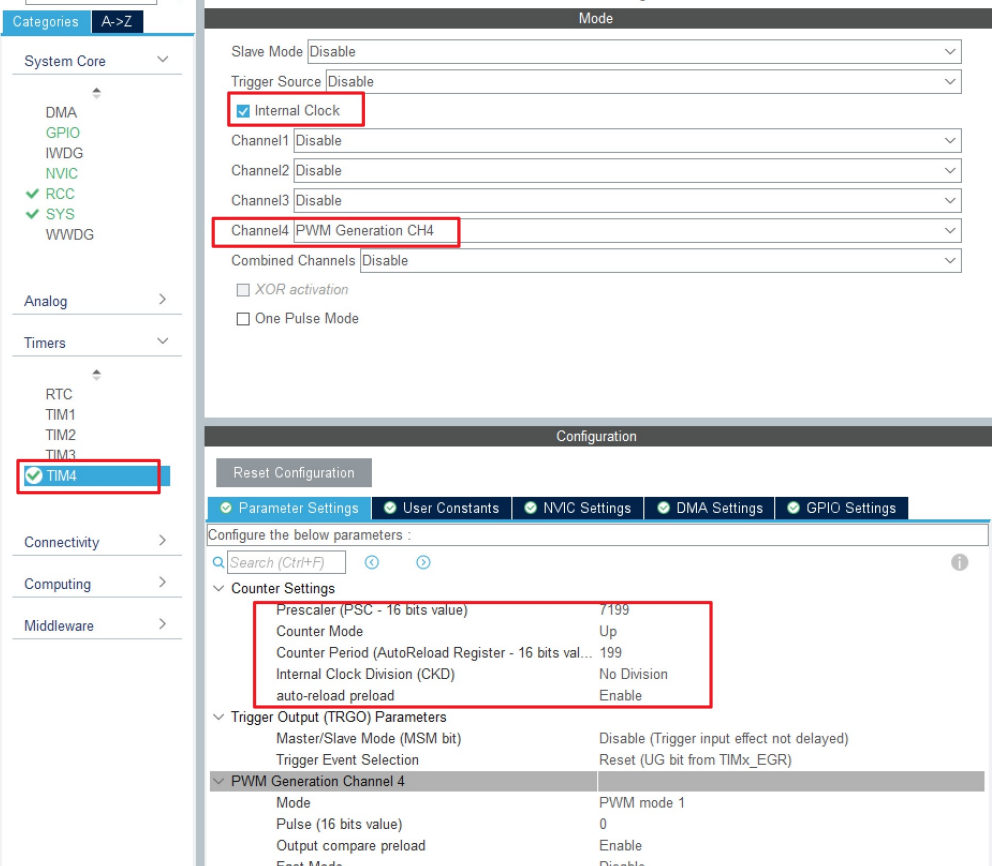
代码实现
sg90.c
#include "sg90.h" #include "gpio.h" #include "tim.h" void initSG90(void) { HAL_TIM_PWM_Start(&htim4,TIM_CHANNEL_4); //启动定时器4 __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 17); //将舵机置为90度 } void sgMiddle(void) { __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 17); //将舵机置为90度 } void sgRight(void) { __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 5); //将舵机置为0度 } void sgLeft(void) { __HAL_TIM_SetCompare(&htim4, TIM_CHANNEL_4, 25); //将舵机置为180度 }sg90.h
#ifndef __SG90_H__ #define __SG90_H__ void initSG90(void); void sgMiddle(void); void sgRight(void); void sgLeft(void); #endifmain.c
initSG90(); HAL_Delay(1000); while (1) { sgLeft(); HAL_Delay(1000); sgMiddle(); HAL_Delay(1000); sgRight(); HAL_Delay(1000); sgMiddle(); HAL_Delay(1000); }封装超声波传感器
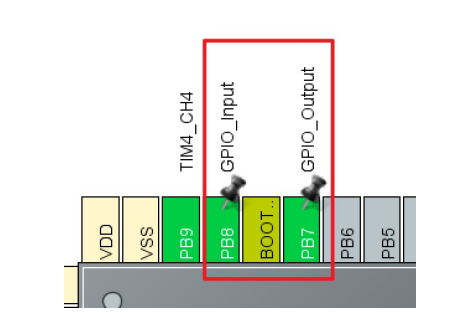
超声波模块接线:
- Trig -- PB7
- Echo -- PB8
cubeMX配置
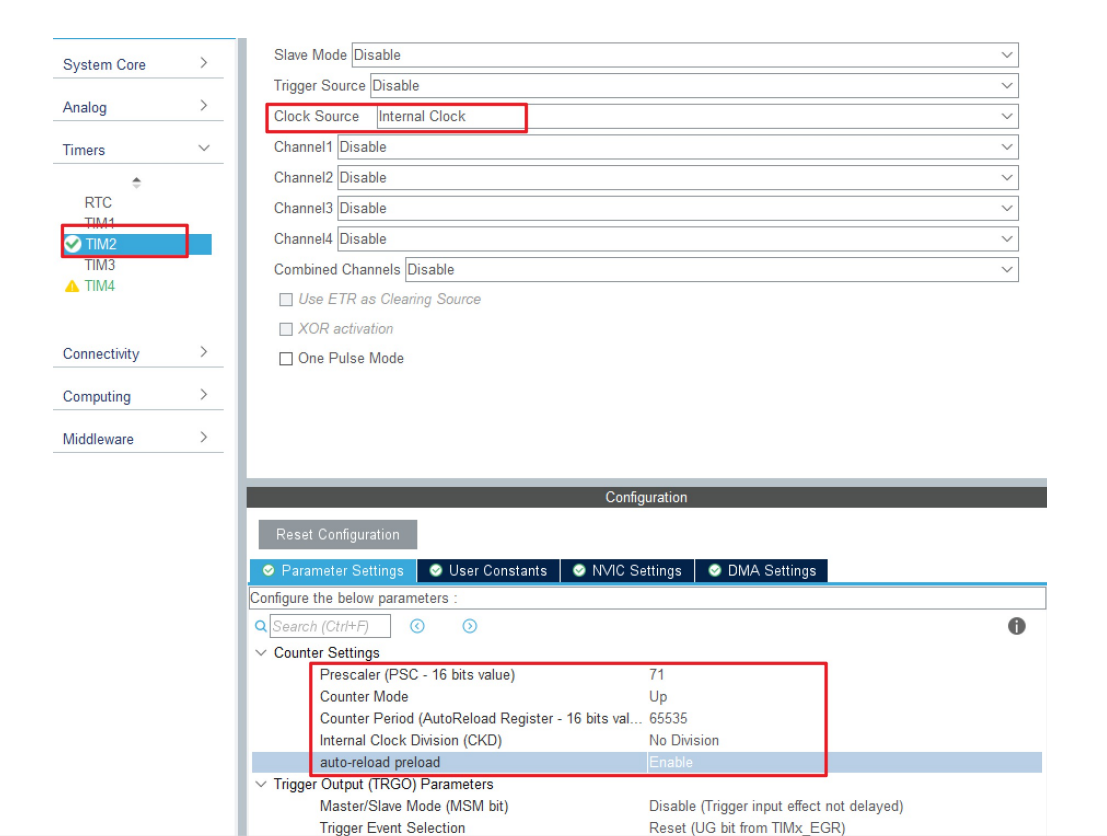
代码实现
sr04.c
#include "sr04.h" #include "gpio.h" #include "tim.h" //使用TIM2来做us级延时函数 void TIM2_Delay_us(uint16_t n_us) { /* 使能定时器2计数 */ __HAL_TIM_ENABLE(&htim2); __HAL_TIM_SetCounter(&htim2, 0); while(__HAL_TIM_GetCounter(&htim2) < ((1 * n_us)-1) ); /* 关闭定时器2计数 */ __HAL_TIM_DISABLE(&htim2); } double get_distance(void) { int cnt=0; //1. Trig ,给Trig端口至少10us的高电平 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_SET);//拉高 TIM2_Delay_us(20); HAL_GPIO_WritePin(GPIOB, GPIO_PIN_7, GPIO_PIN_RESET);//拉低 //2. echo由低电平跳转到高电平,表示开始发送波 //波发出去的那一下,开始启动定时器 while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_RESET);//等待输入电平拉高 HAL_TIM_Base_Start(&htim2); __HAL_TIM_SetCounter(&htim2,0); //3. 由高电平跳转回低电平,表示波回来了 while(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_SET);//等待输入电平变低 //波回来的那一下,我们开始停止定时器 HAL_TIM_Base_Stop(&htim2); //4. 计算出中间经过多少时间 cnt = __HAL_TIM_GetCounter(&htim2); //5. 距离 = 速度 (340m/s)* 时间/2(计数1次表示1us) return (cnt*340/2*0.000001*100); //单位:cm }sr04.h
#ifndef __SR04_H__ #define __SR04_H__ double get_distance(void); #endif main.c
while (1) { if(dir != MIDDLE){ sgMiddle(); dir = MIDDLE; HAL_Delay(300); } disMiddle = get_distance(); if(disMiddle > 35){ //前进 } else { //停止 //测左边距离 sgLeft(); HAL_Delay(300); disLeft = get_distance(); sgMiddle(); HAL_Delay(300); sgRight(); dir = RIGHT; HAL_Delay(300); disRight = get_distance(); } }封装电机驱动
代码实现:
while (1) { if(dir != MIDDLE){ sgMiddle(); dir = MIDDLE; HAL_Delay(300); } disMiddle = get_distance(); if(disMiddle > 35){ //前进 goForward(); }else if(disMiddle < 10){ goBack(); }else { //停止 stop(); //测左边距离 sgLeft(); HAL_Delay(300); disLeft = get_distance(); sgMiddle(); HAL_Delay(300); sgRight(); dir = RIGHT; HAL_Delay(300); disRight = get_distance(); if(disLeft < disRight){ goRight(); HAL_Delay(150); stop(); } if(disRight < disLeft){ goLeft(); HAL_Delay(150); stop(); } } HAL_Delay(50); } 4.测速小车
4.1 测速模块

- 用途:广泛用于电机转速检测,脉冲计数,位置限位等。
- 有遮挡,输出高电平;无遮挡,输出低电平
- 接线 :VCC 接电源正极3.3-5V
- GND 接电源负极 DO TTL开关信号输出
- AO 此模块不起作用
4.2 测试原理和单位换算
- 轮子走一圈,经过一个周长,C = 2x3.14x半径= 3.14 x 直径(6.5cm)
- 对应的码盘也转了一圈,码盘有20个格子,每经过一个格子,会遮挡(高电平)和不遮挡(低电平), 那么一个脉冲就是走了 3.14 * 6.5 cm /20 = 1.0205CM
- 定时器可以设计成一秒,统计脉冲数,一个脉冲就是1cm
- 假设一秒有80脉冲,那么就是80cm/s
4.3 定时器和中断实现测速开发和调试代码
测试数据通过串口发送到上位机
硬件接线
测速模块:
- VCC -- 3.3V 不能接5V,否则遮挡一次会触发3次中断
- OUT -- PB14
cubeMX配置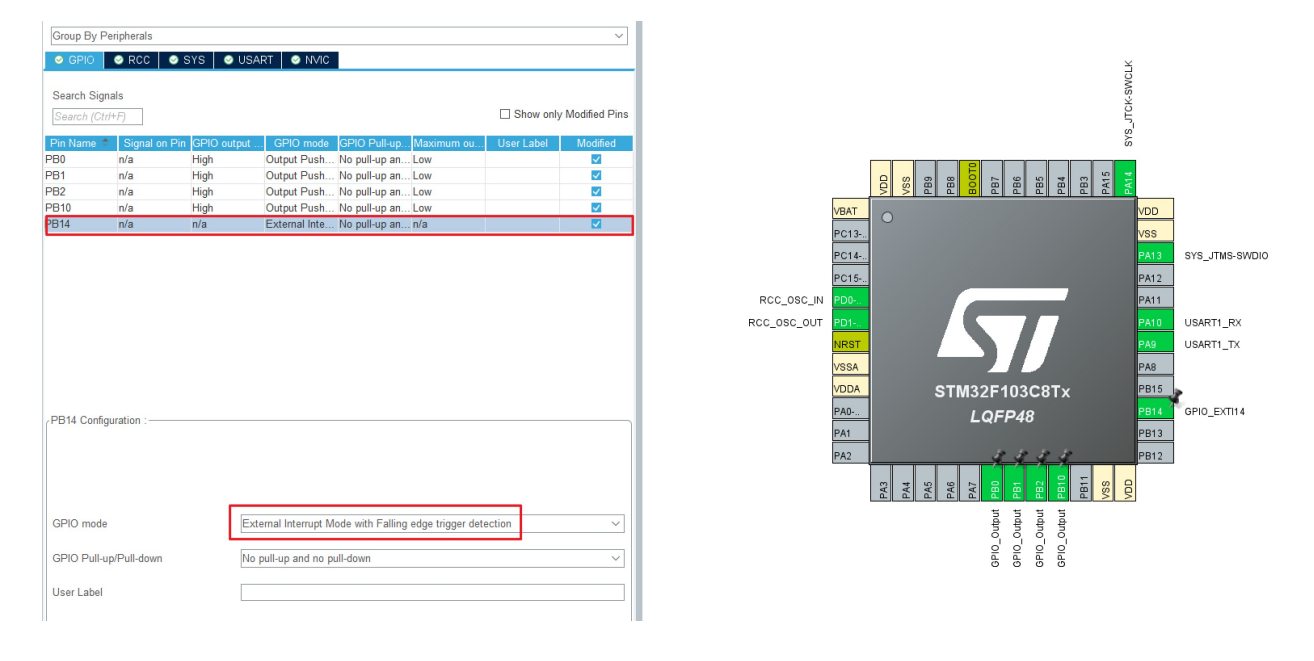

代码实现:
unsigned int speedCnt; void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { if (GPIO_Pin == GPIO_PIN_14) if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_14) == GPIO_PIN_RESET) speedCnt++; } void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { printf("speed: %d\r\n", speedCnt); speedCnt = 0; } main函数里: HAL_TIM_Base_Start_IT(&htim2);4.4 小车速度显示在OLED屏
OLED模块介绍:STM32 OLED屏幕显示详解
硬件接线
- SCL -- PB6
- SDA -- PB7
代码示例:
oled.c
#include "oled.h" #include "i2c.h" #include "oledfont.h" void Oled_Write_Cmd(uint8_t dataCmd) { HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x00, I2C_MEMADD_SIZE_8BIT, &dataCmd, 1, 0xff); } void Oled_Write_Data(uint8_t dataData) { HAL_I2C_Mem_Write(&hi2c1, 0x78, 0x40, I2C_MEMADD_SIZE_8BIT, &dataData, 1, 0xff); } void Oled_Init(void){ Oled_Write_Cmd(0xAE);//--display off Oled_Write_Cmd(0x00);//---set low column address Oled_Write_Cmd(0x10);//---set high column address Oled_Write_Cmd(0x40);//--set start line address Oled_Write_Cmd(0xB0);//--set page address Oled_Write_Cmd(0x81); // contract control Oled_Write_Cmd(0xFF);//--128 Oled_Write_Cmd(0xA1);//set segment remap Oled_Write_Cmd(0xA6);//--normal / reverse Oled_Write_Cmd(0xA8);//--set multiplex ratio(1 to 64) Oled_Write_Cmd(0x3F);//--1/32 duty Oled_Write_Cmd(0xC8);//Com scan direction Oled_Write_Cmd(0xD3);//-set display offset Oled_Write_Cmd(0x00);// Oled_Write_Cmd(0xD5);//set osc division Oled_Write_Cmd(0x80);// Oled_Write_Cmd(0xD8);//set area color mode off Oled_Write_Cmd(0x05);// Oled_Write_Cmd(0xD9);//Set Pre-Charge Period Oled_Write_Cmd(0xF1);// Oled_Write_Cmd(0xDA);//set com pin configuartion Oled_Write_Cmd(0x12);// Oled_Write_Cmd(0xDB);//set Vcomh Oled_Write_Cmd(0x30);// Oled_Write_Cmd(0x8D);//set charge pump enable Oled_Write_Cmd(0x14);// Oled_Write_Cmd(0xAF);//--turn on oled panel } void Oled_Screen_Clear(void){ char i,n; Oled_Write_Cmd (0x20); //set memory addressing mode Oled_Write_Cmd (0x02); //page addressing mode for(i=0;i<8;i++){ Oled_Write_Cmd(0xb0+i); Oled_Write_Cmd(0x00); Oled_Write_Cmd(0x10); for(n=0;n<128;n++)Oled_Write_Data(0x00); } } void Oled_Show_Char(char row,char col,char oledChar){ //row*2-2 unsigned int i; Oled_Write_Cmd(0xb0+(row*2-2)); //page 0 Oled_Write_Cmd(0x00+(col&0x0f)); //low Oled_Write_Cmd(0x10+(col>>4)); //high for(i=((oledChar-32)*16);i<((oledChar-32)*16+8);i++){ Oled_Write_Data(F8X16[i]); //写数据oledTable1 } Oled_Write_Cmd(0xb0+(row*2-1)); //page 1 Oled_Write_Cmd(0x00+(col&0x0f)); //low Oled_Write_Cmd(0x10+(col>>4)); //high for(i=((oledChar-32)*16+8);i<((oledChar-32)*16+8+8);i++){ Oled_Write_Data(F8X16[i]); //写数据oledTable1 } } /******************************************************************************/ // 函数名称:Oled_Show_Char // 输入参数:oledChar // 输出参数:无 // 函数功能:OLED显示单个字符 /******************************************************************************/ void Oled_Show_Str(char row,char col,char *str){ while(*str!=0){ Oled_Show_Char(row,col,*str); str++; col += 8; } } main.c
extern uint8_t buf; unsigned int speedCnt = 0; char speedMes[24]; //主程序发送速度数据的字符串缓冲区 void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { if (GPIO_Pin == GPIO_PIN_14) if (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_14) == GPIO_PIN_RESET) speedCnt++; } void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { printf("speed: %d\r\n", speedCnt); sprintf(speedMes,"speed:%2d cm/s",speedCnt);//串口数据的字符串拼装,speed是格子,每个格子1cm Oled_Show_Str(2,2,speedMes); speedCnt = 0; }5.远程控制小车
5.1 蓝牙控制小车
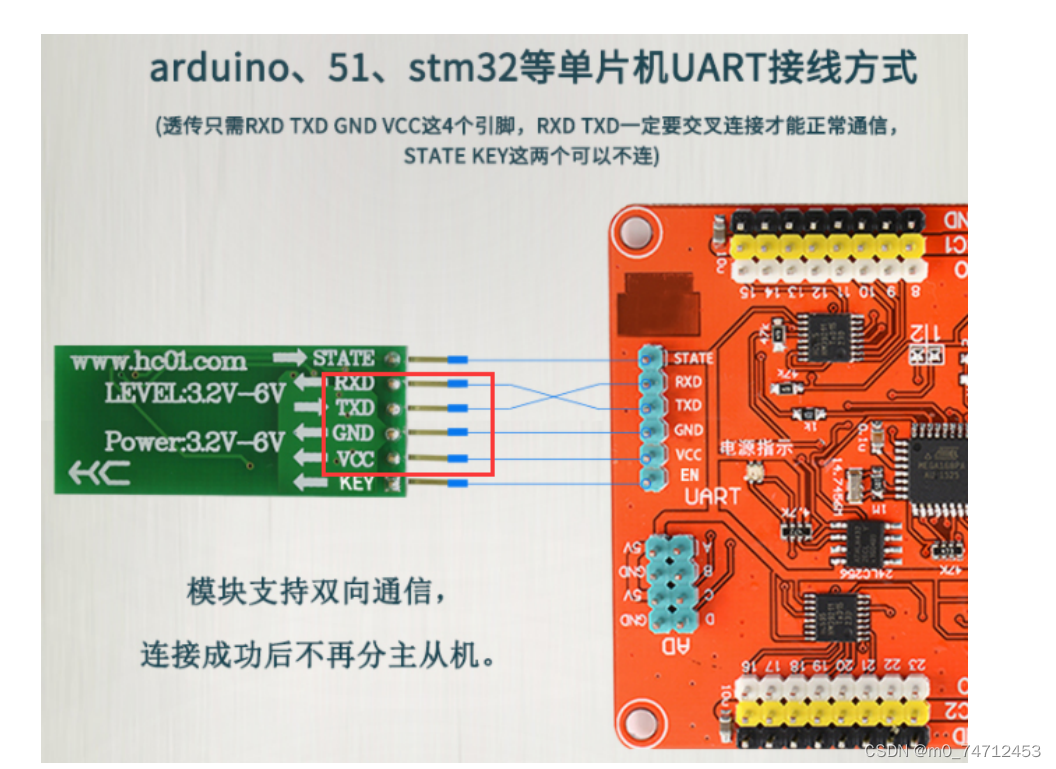
- 使用蓝牙模块,串口透传
- 蓝牙模块,又叫做蓝牙串口模块
串口透传技术:
- 透传即透明传送,是指在数据的传输过程中,通过无线的方式这组数据不发生任何形式的改变,仿 佛传输过程是透明的一样,同时保证传输的质量,原封不动地到了最终接收者手里。
- 以太网,蓝牙,Zigbee, GPRS 等模块玩法一样,对嵌入式程序员来说,不需要关心通讯模块内部数据 及协议栈工作原理,只要通过串口编程获得数据即可
代码实现:
整合前面串口控制小车代码,接入蓝牙模块
if (!strcmp(UART1_RX_Buffer, "M1")) { goForward(); HAL_Delay(10); } else if (!strcmp(UART1_RX_Buffer, "M2")) { goBack(); HAL_Delay(10); } else if (!strcmp(UART1_RX_Buffer, "M3")) { goLeft(); HAL_Delay(10); } else if (!strcmp(UART1_RX_Buffer, "M4")) { goRight(); HAL_Delay(10); } else stop(); 5.2 蓝牙控制并测速小车
原理:运用上面讲到的蓝牙模块和测速模块,将两者代码整合
5.3 wifi控制测速小车

- Wifi模块-ESP-01s
- 蓝牙,ESP-01s,Zigbee, NB-Iot等通信模块都是基于AT指令的设计
AT指令介绍:
- AT指令集是从终端设备(Terminal Equipment,TE)或数据终端设备(Data Terminal Equipment,DTE)向终端适配器(Terminal Adapter,TA)或数据电路终端设备(Data Circuit Terminal Equipment,DCE)发送的。
- 其对所传输的数据包大小有定义:即对于AT指令的发送,除AT两个字符外,最多可以接收1056个 字符的长度(包括最后的空字符)。
- 每个AT命令行中只能包含一条AT指令;对于由终端设备主动向PC端报告的URC指示或者response 响应,也要求一行最多有一个,不允许上报的一行中有多条指示或者响应。AT指令以回车作为结 尾,响应或上报以回车换行为结尾。
硬件接线
- 把esp8266插进串口1
使用方法:
Wifi模块-ESP-01s_esp01s波特率-CSDN博客
5.4 4g控制小车
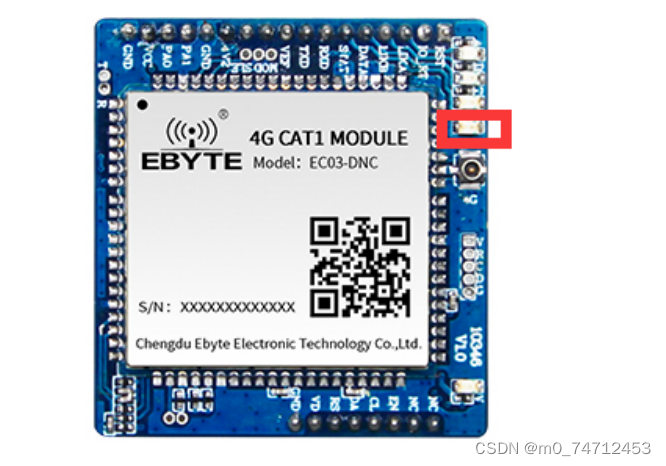
原理:运用EC03-DNC4G通信模块
模块介绍:
- 基于串口AT指令的开发方式
- 有两种工作模式,默认是透传模式,通过其他方式进入AT指令模式
- 注意插卡不要出错,下图红色位置为SIM卡状态灯,亮才是正常
代码不做修改,直接基于蓝牙小车整合, 4g模块只要做好外网透传就可以了
6.语音控制小车
6.1语音模块配置:
使用SU-03T / LD3320
具体介绍看我之前写过的博客:SU-03T语音模块的使用_su-03t开发板语音指令-CSDN博客

6.2 语音控制小车开发和调试代码
硬件接线:
循迹小车:
- 循迹模块(左) -- PB3
- 循迹模块(右) -- PB4
跟随小车:
- 跟随模块(左) -- PA8
- 跟随模块(右) -- PA9
避障小车:
- sg90:PB9
- Trig:PA10
- Echo:PA11
OLED模块:
- SCL -- PB6
- SDA -- PB7
语音模块:
- A25 -- PA15 (跟随)
- A26 -- PA13 (避障)
- A27 -- PA14 (循迹)
cubeMX配置 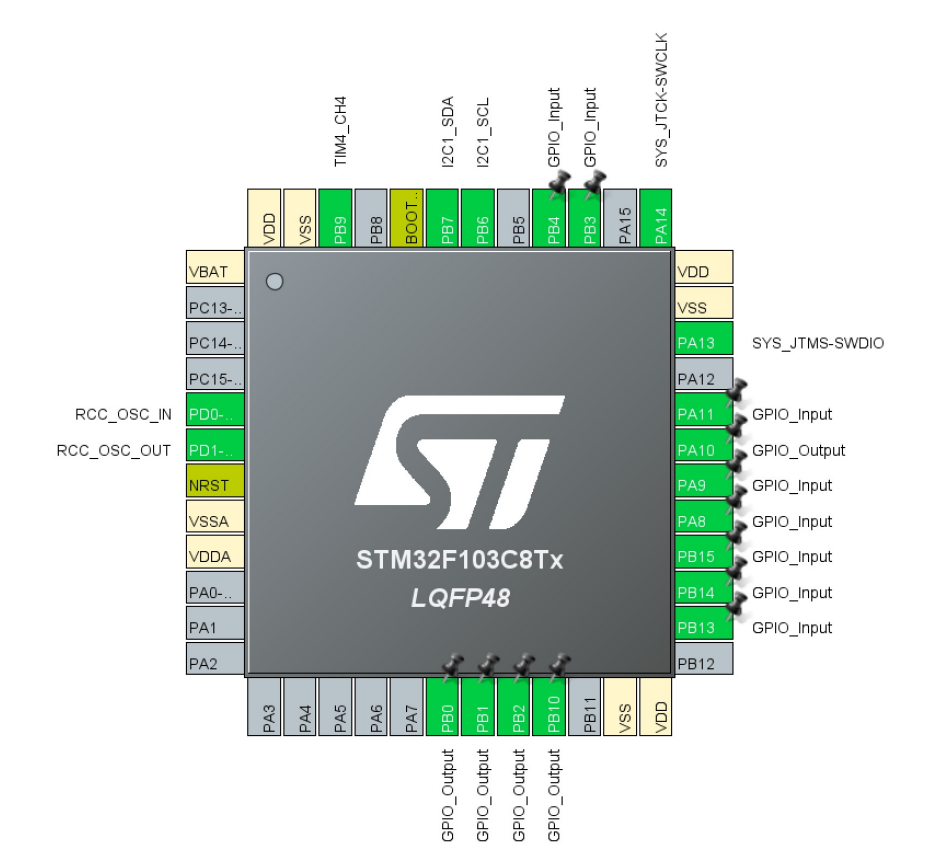
代码示例:
#include "main.h" #include "i2c.h" #include "tim.h" #include "gpio.h" #include "sg90.h" #include "sr04.h" #include "motor.h" #include "oled.h" #define MIDDLE 0 #define LEFT 1 #define RIGHT 2 #define BZ 1 #define XJ 2 #define GS 3 #define LeftWheel_Value_XJ HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_3) #define RightWheel_Value_XJ HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_4) #define LeftWheel_Value_GS HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_8) #define RightWheel_Value_GS HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_9) #define A25 HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_15) #define A26 HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_13) #define A27 HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_14) void SystemClock_Config(void); char dir; void xunjiMode() { if(LeftWheel_Value_XJ == GPIO_PIN_RESET && RightWheel_Value_XJ == GPIO_PIN_RESET) goForward(); if(LeftWheel_Value_XJ == GPIO_PIN_SET && RightWheel_Value_XJ == GPIO_PIN_RESET) goLeft(); if(LeftWheel_Value_XJ == GPIO_PIN_RESET && RightWheel_Value_XJ == GPIO_PIN_SET) goRight(); if(LeftWheel_Value_XJ == GPIO_PIN_SET && RightWheel_Value_XJ == GPIO_PIN_SET) stop(); } void gensuiMode() { if(LeftWheel_Value_GS == GPIO_PIN_RESET && RightWheel_Value_GS == GPIO_PIN_RESET) goForward(); if(LeftWheel_Value_GS == GPIO_PIN_SET && RightWheel_Value_GS == GPIO_PIN_RESET) goRight(); if(LeftWheel_Value_GS == GPIO_PIN_RESET && RightWheel_Value_GS == GPIO_PIN_SET) goLeft(); if(LeftWheel_Value_GS == GPIO_PIN_SET && RightWheel_Value_GS == GPIO_PIN_SET) stop(); } void bizhangMode() { double disMiddle; double disLeft; double disRight; if(dir != MIDDLE){ sgMiddle(); dir = MIDDLE; HAL_Delay(300); } disMiddle = get_distance(); if(disMiddle > 35){ //前进 goForward(); }else if(disMiddle < 10){ goBack(); }else { //停止 stop(); //测左边距离 sgLeft(); HAL_Delay(300); disLeft = get_distance(); sgMiddle(); HAL_Delay(300); sgRight(); dir = RIGHT; HAL_Delay(300); disRight = get_distance(); if(disLeft < disRight){ goRight(); HAL_Delay(150); stop(); } if(disRight < disLeft){ goLeft(); HAL_Delay(150); stop(); } } HAL_Delay(50); } int main(void) { int mark = 0; HAL_Init(); SystemClock_Config(); MX_GPIO_Init(); MX_TIM4_Init(); MX_TIM2_Init(); MX_I2C1_Init(); initSG90(); HAL_Delay(1000); dir = MIDDLE; Oled_Init(); Oled_Screen_Clear(); Oled_Show_Str(2,2,"-----Ready----"); while (1) { //满足寻迹模式的条件 if(A25 == 1 && A26 == 1 && A27 == 0){ if(mark != XJ){ Oled_Screen_Clear(); Oled_Show_Str(2,2,"-----XunJi----"); } mark = XJ; xunjiMode(); } //满足跟随模式的条件 if(A25 == 0 && A26 == 1 && A27 == 1){ if(mark != GS){ Oled_Screen_Clear(); Oled_Show_Str(2,2,"-----GenSui----"); } mark = GS; gensuiMode(); } //满足避障模式的条件 if(A25 == 1 && A26 == 0 && A27 == 1){ if(mark != BZ){ Oled_Screen_Clear(); Oled_Show_Str(2,2,"-----BiZhang----"); } mark = BZ; bizhangMode(); } } } 