
阅读量:6
可以与 ROS 2 一起使用的几种先进的机器人模拟器,如 Gazebo、Webots 等。与 turtlesim 不同,它们依赖于基于物理的机器人、传感器、执行器和物体模型,提供相当真实的结果。因此,您在模拟中观察到的内容与将 ROS 2 控制器转移到真实机器人时的结果非常接近。
这套教程将教你如何使用 ROS 2 配置不同的模拟器。
Webots
这套教程将教你如何配置带有 ROS 2 的 Webots 模拟器。
安装 (Ubuntu)
安装 (Windows)
安装 (macOS)
设置机器人模拟(基础)
设置机器人模拟(高级)
设置重置处理程序
Ros2Supervisor 节点
安装 (Ubuntu)
目标:安装 webots_ros2 软件包并在 Ubuntu 上运行模拟示例。
教程级别:高级
时间:10 分钟
目录
背景
先决条件
多个安装 Webots
任务
1 安装
webots_ros22 启动
webots_ros2_universal_robot示例
背景
webots_ros2 软件包提供了 ROS 2 和 Webots 之间的接口。它包括几个子包,其中包括 webots_ros2_driver ,它允许您启动 Webots 并与之通信。此接口在以下大多数教程中使用,因此需要预先安装它。其他子包主要是使用该接口显示多种可能实现的示例。在本教程中,您将安装该软件包并学习如何运行这些示例之一。
先决条件
建议了解初学者教程中涵盖的基本 ROS 原理。特别是,创建工作区和创建包是有用的先决条件。
应安装 Webots 软件以使用 webots_ros2 接口。您可以按照安装程序进行安装https://cyberbotics.com/doc/guide/installation-procedure 或从源代码构建https://github.com/cyberbotics/webots/wiki/Linux-installation/。
或者,您也可以让 webots_ros2 自动下载和安装 Webots。当您启动包的示例并且没有找到 Webots 安装时,会出现此选项。
多个安装 Webots
如果您在计算机上安装了不同版本的 Webots, webots_ros2 将按以下顺序查找 Webots:
如果设置了
ROS2_WEBOTS_HOME环境变量,ROS 2 将使用此文件夹中的 Webots,而不管其版本如何。如果设置了
WEBOTS_HOME环境变量,ROS 2 将使用此文件夹中的 Webots,而不管其版本如何。如果这些变量都没有设置,
webots_ros2将在兼容版本的默认安装路径中查找 Webots:/usr/local/webots和/snap/webots/current/usr/share/webots。如果找不到 Webots,
webots_ros2将显示一个窗口,提供最新兼容版本 Webots 的自动安装。
任务
1 安装 webots_ros2
您可以安装官方发布的软件包,或者从 Github 上安装最新的更新源
安装 webots_ros2 分布式软件包
在终端中运行以下命令。
sudo apt-get install ros-jazzy-webots-ros2从源代码安装 webots_ros2
// 创建一个包含其 src 目录的 ROS 2 工作区 mkdir -p ~/ros2_ws/src source /opt/ros/jazzy/setup.bash // 源 ROS 2 环境。 // 从 Github 检索源代码。 cd ~/ros2_ws git clone --recurse-submodules https://github.com/cyberbotics/webots_ros2.git src/webots_ros2 // 安装软件包依赖项。 sudo apt install python3-pip python3-rosdep python3-colcon-common-extensions sudo rosdep init && rosdep update rosdep install --from-paths src --ignore-src --rosdistro jazzy // 使用 colcon 构建包。 colcon build // 获取此工作区。 source install/local_setup.bashcxy@ubuntu2404-cxy:~/ros2_ws$ git clone --recurse-submodules https://github.com/cyberbotics/webots_ros2.git src/webots_ros2 正克隆到 'src/webots_ros2'... remote: Enumerating objects: 13903, done. remote: Counting objects: 100% (3194/3194), done. remote: Compressing objects: 100% (787/787), done. remote: Total 13903 (delta 2603), reused 2729 (delta 2380), pack-reused 10709 接收对象中: 100% (13903/13903), 55.79 MiB | 1.96 MiB/s, 完成. 处理 delta 中: 100% (9481/9481), 完成. 子模组 'webots_ros2_importer/webots_ros2_importer/urdf2webots'(https://github.com/cyberbotics/urdf2webots.git)已对路径 'webots_ros2_importer/webots_ros2_importer/urdf2webots' 注册 正克隆到 '/home/cxy/ros2_ws/src/webots_ros2/webots_ros2_importer/webots_ros2_importer/urdf2webots'... remote: Enumerating objects: 3474, done. remote: Counting objects: 100% (737/737), done. remote: Compressing objects: 100% (410/410), done. remote: Total 3474 (delta 472), reused 532 (delta 318), pack-reused 2737 接收对象中: 100% (3474/3474), 114.00 MiB | 2.16 MiB/s, 完成. 处理 delta 中: 100% (1718/1718), 完成. 子模组路径 'webots_ros2_importer/webots_ros2_importer/urdf2webots':检出 '905b12c8abdb1e3a847a0fc8d10772d1a5a0d7fe' 子模组 'tests/sources/motoman'(https://github.com/ros-industrial/motoman.git)已对路径 'webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman' 注册 正克隆到 '/home/cxy/ros2_ws/src/webots_ros2/webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman'... fatal: 无法访问 'https://github.com/ros-industrial/motoman.git/':gnutls_handshake() failed: The TLS connection was non-properly terminated. fatal: 无法克隆 'https://github.com/ros-industrial/motoman.git' 到子模组路径 '/home/cxy/ros2_ws/src/webots_ros2/webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman' 克隆 'tests/sources/motoman' 失败。按计划重试 正克隆到 '/home/cxy/ros2_ws/src/webots_ros2/webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman'... remote: Enumerating objects: 8983, done. remote: Counting objects: 100% (373/373), done. remote: Compressing objects: 100% (159/159), done. remote: Total 8983 (delta 183), reused 335 (delta 164), pack-reused 8610 接收对象中: 100% (8983/8983), 77.06 MiB | 12.96 MiB/s, 完成. 处理 delta 中: 100% (5357/5357), 完成. 子模组路径 'webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman':检出 '80c529979de52bb6eed5988d1e3076ae9abc131e' 子模组路径 'webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman':检出 '80c529979de52bb6eed5988d1e3076ae9abc131e' cxy@ubuntu2404-cxy:~/ros2_ws$ git clone --recurse-submodules https://github.com/cyberbotics/webots_ros2.git src/webots_ros2 正克隆到 'src/webots_ros2'... remote: Enumerating objects: 13903, done. remote: Counting objects: 100% (3194/3194), done. remote: Compressing objects: 100% (787/787), done. remote: Total 13903 (delta 2603), reused 2729 (delta 2380), pack-reused 10709 接收对象中: 100% (13903/13903), 55.79 MiB | 1.96 MiB/s, 完成. 处理 delta 中: 100% (9481/9481), 完成. 子模组 'webots_ros2_importer/webots_ros2_importer/urdf2webots'(https://github.com/cyberbotics/urdf2webots.git)已对路径 'webots_ros2_importer/webots_ros2_importer/urdf2webots' 注册 正克隆到 '/home/cxy/ros2_ws/src/webots_ros2/webots_ros2_importer/webots_ros2_importer/urdf2webots'... remote: Enumerating objects: 3474, done. remote: Counting objects: 100% (737/737), done. remote: Compressing objects: 100% (410/410), done. remote: Total 3474 (delta 472), reused 532 (delta 318), pack-reused 2737 接收对象中: 100% (3474/3474), 114.00 MiB | 2.16 MiB/s, 完成. 处理 delta 中: 100% (1718/1718), 完成. 子模组路径 'webots_ros2_importer/webots_ros2_importer/urdf2webots':检出 '905b12c8abdb1e3a847a0fc8d10772d1a5a0d7fe' 子模组 'tests/sources/motoman'(https://github.com/ros-industrial/motoman.git)已对路径 'webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman' 注册 正克隆到 '/home/cxy/ros2_ws/src/webots_ros2/webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman'... fatal: 无法访问 'https://github.com/ros-industrial/motoman.git/':gnutls_handshake() failed: The TLS connection was non-properly terminated. fatal: 无法克隆 'https://github.com/ros-industrial/motoman.git' 到子模组路径 '/home/cxy/ros2_ws/src/webots_ros2/webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman' 克隆 'tests/sources/motoman' 失败。按计划重试 正克隆到 '/home/cxy/ros2_ws/src/webots_ros2/webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman'... remote: Enumerating objects: 8983, done. remote: Counting objects: 100% (373/373), done. remote: Compressing objects: 100% (159/159), done. remote: Total 8983 (delta 183), reused 335 (delta 164), pack-reused 8610 接收对象中: 100% (8983/8983), 77.06 MiB | 12.96 MiB/s, 完成. 处理 delta 中: 100% (5357/5357), 完成. 子模组路径 'webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman':检出 '80c529979de52bb6eed5988d1e3076ae9abc131e' 子模组路径 'webots_ros2_importer/webots_ros2_importer/urdf2webots/tests/sources/motoman':检出 '80c529979de52bb6eed5988d1e3076ae9abc131e' cxy@ubuntu2404-cxy:~/ros2_ws$ rosdep install --from-paths src --ignore-src --rosdistro jazzy executing command [sudo -H apt-get install ros-jazzy-hardware-interface] 正在读取软件包列表... 完成 正在分析软件包的依赖关系树... 完成 正在读取状态信息... 完成 将会同时安装下列软件: ros-jazzy-control-msgs ros-jazzy-joint-limits ros-jazzy-rclcpp-lifecycle ros-jazzy-trajectory-msgs 下列【新】软件包将被安装: ros-jazzy-control-msgs ros-jazzy-hardware-interface ros-jazzy-joint-limits ros-jazzy-rclcpp-lifecycle ros-jazzy-trajectory-msgs 升级了 0 个软件包,新安装了 5 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 需要下载 1,140 kB 的归档。 解压缩后会消耗 14.8 MB 的额外空间。 您希望继续执行吗?[Y/n] y 获取:1 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-trajectory-msgs amd64 5.3.5-1noble.20240702.061753 [98.0 kB] 获取:2 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-control-msgs amd64 5.2.0-1noble.20240702.064807 [707 kB] 获取:3 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-rclcpp-lifecycle amd64 28.1.3-1noble.20240703.160435 [82.0 kB] 获取:4 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-joint-limits amd64 4.11.0-1noble.20240703.161153 [13.6 kB] 获取:5 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-hardware-interface amd64 4.11.0-1noble.20240703.162328 [240 kB] 已下载 1,140 kB,耗时 16秒 (73.2 kB/s) 正在选中未选择的软件包 ros-jazzy-trajectory-msgs。 (正在读取数据库 ... 系统当前共安装有 386151 个文件和目录。) 准备解压 .../ros-jazzy-trajectory-msgs_5.3.5-1noble.20240702.061753_amd64.deb ... 正在解压 ros-jazzy-trajectory-msgs (5.3.5-1noble.20240702.061753) ... 正在选中未选择的软件包 ros-jazzy-control-msgs。 准备解压 .../ros-jazzy-control-msgs_5.2.0-1noble.20240702.064807_amd64.deb ... 正在解压 ros-jazzy-control-msgs (5.2.0-1noble.20240702.064807) ... 正在选中未选择的软件包 ros-jazzy-rclcpp-lifecycle。 准备解压 .../ros-jazzy-rclcpp-lifecycle_28.1.3-1noble.20240703.160435_amd64.deb ... 正在解压 ros-jazzy-rclcpp-lifecycle (28.1.3-1noble.20240703.160435) ... 正在选中未选择的软件包 ros-jazzy-joint-limits。 准备解压 .../ros-jazzy-joint-limits_4.11.0-1noble.20240703.161153_amd64.deb ... 正在解压 ros-jazzy-joint-limits (4.11.0-1noble.20240703.161153) ... 正在选中未选择的软件包 ros-jazzy-hardware-interface。 准备解压 .../ros-jazzy-hardware-interface_4.11.0-1noble.20240703.162328_amd64.deb ... 正在解压 ros-jazzy-hardware-interface (4.11.0-1noble.20240703.162328) ... 正在设置 ros-jazzy-trajectory-msgs (5.3.5-1noble.20240702.061753) ... 正在设置 ros-jazzy-rclcpp-lifecycle (28.1.3-1noble.20240703.160435) ... 正在设置 ros-jazzy-joint-limits (4.11.0-1noble.20240703.161153) ... 正在设置 ros-jazzy-control-msgs (5.2.0-1noble.20240702.064807) ... 正在设置 ros-jazzy-hardware-interface (4.11.0-1noble.20240703.162328) ... executing command [sudo -H apt-get install ros-jazzy-controller-manager] 正在读取软件包列表... 完成 正在分析软件包的依赖关系树... 完成 正在读取状态信息... 完成 将会同时安装下列软件: libdw-dev libelf-dev ros-jazzy-ament-copyright ros-jazzy-backward-ros ros-jazzy-controller-interface ros-jazzy-controller-manager-msgs ros-jazzy-diagnostic-msgs ros-jazzy-diagnostic-updater ros-jazzy-realtime-tools ros-jazzy-ros2-control-test-assets ros-jazzy-ros2node ros-jazzy-ros2param ros-jazzy-ros2pkg ros-jazzy-ros2run ros-jazzy-ros2service ros-jazzy-rosidl-runtime-py 下列【新】软件包将被安装: libdw-dev libelf-dev ros-jazzy-ament-copyright ros-jazzy-backward-ros ros-jazzy-controller-interface ros-jazzy-controller-manager ros-jazzy-controller-manager-msgs ros-jazzy-diagnostic-msgs ros-jazzy-diagnostic-updater ros-jazzy-realtime-tools ros-jazzy-ros2-control-test-assets ros-jazzy-ros2node ros-jazzy-ros2param ros-jazzy-ros2pkg ros-jazzy-ros2run ros-jazzy-ros2service ros-jazzy-rosidl-runtime-py 升级了 0 个软件包,新安装了 17 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 需要下载 1,652 kB 的归档。 解压缩后会消耗 12.7 MB 的额外空间。 您希望继续执行吗?[Y/n] y 获取:1 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-ament-copyright amd64 0.17.1-1noble.20240702.041730 [52.1 kB] 获取:2 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-backward-ros amd64 1.0.2-6noble.20240702.040204 [59.7 kB] 获取:3 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-controller-interface amd64 4.11.0-1noble.20240703.162722 [36.9 kB] 获取:4 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-controller-manager-msgs amd64 4.11.0-1noble.20240702.050027 [340 kB] 获取:5 http://archive.ubuntu.com/ubuntu noble/main amd64 libelf-dev amd64 0.190-1.1build4 [68.5 kB] 获取:6 http://archive.ubuntu.com/ubuntu noble/main amd64 libdw-dev amd64 0.190-1.1build4 [340 kB] 获取:7 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-diagnostic-msgs amd64 5.3.5-1noble.20240702.052202 [136 kB] 获取:8 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-diagnostic-updater amd64 3.1.2-3noble.20240703.170226 [103 kB] 获取:9 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-realtime-tools amd64 2.5.0-4noble.20240703.161732 [24.6 kB] 获取:10 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-ros2-control-test-assets amd64 4.11.0-1noble.20240702.041140 [14.7 kB] 获取:11 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-ros2node amd64 0.32.1-1noble.20240703.155854 [15.2 kB] 获取:12 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-rosidl-runtime-py amd64 0.13.1-2noble.20240702.043635 [20.3 kB] 获取:13 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-ros2service amd64 0.32.1-1noble.20240703.155937 [22.6 kB] 获取:14 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-ros2param amd64 0.32.1-1noble.20240703.160030 [22.1 kB] 获取:15 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-ros2pkg amd64 0.32.1-1noble.20240703.170548 [28.3 kB] 获取:16 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-ros2run amd64 0.32.1-1noble.20240703.170825 [9,674 B] 获取:17 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-controller-manager amd64 4.11.0-1noble.20240703.171033 [359 kB] 已下载 1,652 kB,耗时 15秒 (111 kB/s) 正在选中未选择的软件包 libelf-dev:amd64。 (正在读取数据库 ... 系统当前共安装有 387103 个文件和目录。) 准备解压 .../00-libelf-dev_0.190-1.1build4_amd64.deb ... 正在解压 libelf-dev:amd64 (0.190-1.1build4) ... 正在选中未选择的软件包 libdw-dev:amd64。 准备解压 .../01-libdw-dev_0.190-1.1build4_amd64.deb ... 正在解压 libdw-dev:amd64 (0.190-1.1build4) ... 正在选中未选择的软件包 ros-jazzy-ament-copyright。 准备解压 .../02-ros-jazzy-ament-copyright_0.17.1-1noble.20240702.041730_amd64.deb ... 正在解压 ros-jazzy-ament-copyright (0.17.1-1noble.20240702.041730) ... 正在选中未选择的软件包 ros-jazzy-backward-ros。 准备解压 .../03-ros-jazzy-backward-ros_1.0.2-6noble.20240702.040204_amd64.deb ... 正在解压 ros-jazzy-backward-ros (1.0.2-6noble.20240702.040204) ... 正在选中未选择的软件包 ros-jazzy-controller-interface。 准备解压 .../04-ros-jazzy-controller-interface_4.11.0-1noble.20240703.162722_amd64.deb ... 正在解压 ros-jazzy-controller-interface (4.11.0-1noble.20240703.162722) ... 正在选中未选择的软件包 ros-jazzy-controller-manager-msgs。 准备解压 .../05-ros-jazzy-controller-manager-msgs_4.11.0-1noble.20240702.050027_amd64.deb ... 正在解压 ros-jazzy-controller-manager-msgs (4.11.0-1noble.20240702.050027) ... 正在选中未选择的软件包 ros-jazzy-diagnostic-msgs。 准备解压 .../06-ros-jazzy-diagnostic-msgs_5.3.5-1noble.20240702.052202_amd64.deb ... 正在解压 ros-jazzy-diagnostic-msgs (5.3.5-1noble.20240702.052202) ... 正在选中未选择的软件包 ros-jazzy-diagnostic-updater。 准备解压 .../07-ros-jazzy-diagnostic-updater_3.1.2-3noble.20240703.170226_amd64.deb ... 正在解压 ros-jazzy-diagnostic-updater (3.1.2-3noble.20240703.170226) ... 正在选中未选择的软件包 ros-jazzy-realtime-tools。 准备解压 .../08-ros-jazzy-realtime-tools_2.5.0-4noble.20240703.161732_amd64.deb ... 正在解压 ros-jazzy-realtime-tools (2.5.0-4noble.20240703.161732) ... 正在选中未选择的软件包 ros-jazzy-ros2-control-test-assets。 准备解压 .../09-ros-jazzy-ros2-control-test-assets_4.11.0-1noble.20240702.041140_amd64.deb ... 正在解压 ros-jazzy-ros2-control-test-assets (4.11.0-1noble.20240702.041140) ... 正在选中未选择的软件包 ros-jazzy-ros2node。 准备解压 .../10-ros-jazzy-ros2node_0.32.1-1noble.20240703.155854_amd64.deb ... 正在解压 ros-jazzy-ros2node (0.32.1-1noble.20240703.155854) ... 正在选中未选择的软件包 ros-jazzy-rosidl-runtime-py。 准备解压 .../11-ros-jazzy-rosidl-runtime-py_0.13.1-2noble.20240702.043635_amd64.deb ... 正在解压 ros-jazzy-rosidl-runtime-py (0.13.1-2noble.20240702.043635) ... 正在选中未选择的软件包 ros-jazzy-ros2service。 准备解压 .../12-ros-jazzy-ros2service_0.32.1-1noble.20240703.155937_amd64.deb ... 正在解压 ros-jazzy-ros2service (0.32.1-1noble.20240703.155937) ... 正在选中未选择的软件包 ros-jazzy-ros2param。 准备解压 .../13-ros-jazzy-ros2param_0.32.1-1noble.20240703.160030_amd64.deb ... 正在解压 ros-jazzy-ros2param (0.32.1-1noble.20240703.160030) ... 正在选中未选择的软件包 ros-jazzy-ros2pkg。 准备解压 .../14-ros-jazzy-ros2pkg_0.32.1-1noble.20240703.170548_amd64.deb ... 正在解压 ros-jazzy-ros2pkg (0.32.1-1noble.20240703.170548) ... 正在选中未选择的软件包 ros-jazzy-ros2run。 准备解压 .../15-ros-jazzy-ros2run_0.32.1-1noble.20240703.170825_amd64.deb ... 正在解压 ros-jazzy-ros2run (0.32.1-1noble.20240703.170825) ... 正在选中未选择的软件包 ros-jazzy-controller-manager。 准备解压 .../16-ros-jazzy-controller-manager_4.11.0-1noble.20240703.171033_amd64.deb ... 正在解压 ros-jazzy-controller-manager (4.11.0-1noble.20240703.171033) ... 正在设置 ros-jazzy-diagnostic-msgs (5.3.5-1noble.20240702.052202) ... 正在设置 ros-jazzy-ament-copyright (0.17.1-1noble.20240702.041730) ... 正在设置 ros-jazzy-diagnostic-updater (3.1.2-3noble.20240703.170226) ... 正在设置 ros-jazzy-ros2pkg (0.32.1-1noble.20240703.170548) ... 正在设置 ros-jazzy-controller-interface (4.11.0-1noble.20240703.162722) ... 正在设置 ros-jazzy-rosidl-runtime-py (0.13.1-2noble.20240702.043635) ... 正在设置 libelf-dev:amd64 (0.190-1.1build4) ... 正在设置 ros-jazzy-controller-manager-msgs (4.11.0-1noble.20240702.050027) ... 正在设置 ros-jazzy-ros2node (0.32.1-1noble.20240703.155854) ... 正在设置 ros-jazzy-realtime-tools (2.5.0-4noble.20240703.161732) ... 正在设置 ros-jazzy-ros2-control-test-assets (4.11.0-1noble.20240702.041140) ... 正在设置 ros-jazzy-ros2service (0.32.1-1noble.20240703.155937) ... 正在设置 ros-jazzy-ros2run (0.32.1-1noble.20240703.170825) ... 正在设置 ros-jazzy-ros2param (0.32.1-1noble.20240703.160030) ... 正在设置 libdw-dev:amd64 (0.190-1.1build4) ... 正在设置 ros-jazzy-backward-ros (1.0.2-6noble.20240702.040204) ... 正在设置 ros-jazzy-controller-manager (4.11.0-1noble.20240703.171033) ... 正在处理用于 man-db (2.12.0-4build2) 的触发器 ... executing command [sudo -H apt-get install python3-collada] 正在读取软件包列表... 完成 正在分析软件包的依赖关系树... 完成 正在读取状态信息... 完成 下列【新】软件包将被安装: python3-collada 升级了 0 个软件包,新安装了 1 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 需要下载 83.4 kB 的归档。 解压缩后会消耗 989 kB 的额外空间。 获取:1 http://archive.ubuntu.com/ubuntu noble/universe amd64 python3-collada all 0.7.2-1 [83.4 kB] 已下载 83.4 kB,耗时 6秒 (13.3 kB/s) 正在选中未选择的软件包 python3-collada。 (正在读取数据库 ... 系统当前共安装有 388289 个文件和目录。) 准备解压 .../python3-collada_0.7.2-1_all.deb ... 正在解压 python3-collada (0.7.2-1) ... 正在设置 python3-collada (0.7.2-1) ... executing command [sudo -H apt-get install ros-jazzy-diff-drive-controller] 正在读取软件包列表... 完成 正在分析软件包的依赖关系树... 完成 正在读取状态信息... 完成 下列【新】软件包将被安装: ros-jazzy-diff-drive-controller 升级了 0 个软件包,新安装了 1 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 需要下载 200 kB 的归档。 解压缩后会消耗 923 kB 的额外空间。 获取:1 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-diff-drive-controller amd64 4.9.0-1noble.20240703.175105 [200 kB] 已下载 200 kB,耗时 4秒 (46.3 kB/s) 正在选中未选择的软件包 ros-jazzy-diff-drive-controller。 (正在读取数据库 ... 系统当前共安装有 388333 个文件和目录。) 准备解压 .../ros-jazzy-diff-drive-controller_4.9.0-1noble.20240703.175105_amd64.deb ... 正在解压 ros-jazzy-diff-drive-controller (4.9.0-1noble.20240703.175105) ... 正在设置 ros-jazzy-diff-drive-controller (4.9.0-1noble.20240703.175105) ... executing command [sudo -H apt-get install ros-jazzy-joint-state-broadcaster] 正在读取软件包列表... 完成 正在分析软件包的依赖关系树... 完成 正在读取状态信息... 完成 将会同时安装下列软件: python3-typeguard ros-jazzy-generate-parameter-library ros-jazzy-generate-parameter-library-py ros-jazzy-parameter-traits ros-jazzy-rsl ros-jazzy-tcb-span ros-jazzy-tl-expected 下列【新】软件包将被安装: python3-typeguard ros-jazzy-generate-parameter-library ros-jazzy-generate-parameter-library-py ros-jazzy-joint-state-broadcaster ros-jazzy-parameter-traits ros-jazzy-rsl ros-jazzy-tcb-span ros-jazzy-tl-expected 升级了 0 个软件包,新安装了 8 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 需要下载 247 kB 的归档。 解压缩后会消耗 1,240 kB 的额外空间。 您希望继续执行吗?[Y/n] y 获取:1 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-generate-parameter-library-py amd64 0.3.8-4noble.20240702.041832 [51.2 kB] 获取:2 http://archive.ubuntu.com/ubuntu noble/universe amd64 python3-typeguard all 4.1.5-1 [32.7 kB] 获取:3 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-tcb-span amd64 1.0.2-5noble.20240702.041437 [10.5 kB] 获取:4 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-tl-expected amd64 1.0.2-5noble.20240702.041512 [16.3 kB] 获取:5 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-rsl amd64 1.1.0-3noble.20240703.162115 [17.1 kB] 获取:6 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-parameter-traits amd64 0.3.8-4noble.20240703.174706 [9,784 B] 获取:7 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-generate-parameter-library amd64 0.3.8-4noble.20240703.174853 [8,322 B] 获取:8 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-joint-state-broadcaster amd64 4.9.0-1noble.20240703.175307 [101 kB] 已下载 247 kB,耗时 33秒 (7,592 B/s) 正在选中未选择的软件包 python3-typeguard。 (正在读取数据库 ... 系统当前共安装有 388372 个文件和目录。) 准备解压 .../0-python3-typeguard_4.1.5-1_all.deb ... 正在解压 python3-typeguard (4.1.5-1) ... 正在选中未选择的软件包 ros-jazzy-generate-parameter-library-py。 准备解压 .../1-ros-jazzy-generate-parameter-library-py_0.3.8-4noble.20240702.041832_amd64.deb ... 正在解压 ros-jazzy-generate-parameter-library-py (0.3.8-4noble.20240702.041832) ... 正在选中未选择的软件包 ros-jazzy-tcb-span。 准备解压 .../2-ros-jazzy-tcb-span_1.0.2-5noble.20240702.041437_amd64.deb ... 正在解压 ros-jazzy-tcb-span (1.0.2-5noble.20240702.041437) ... 正在选中未选择的软件包 ros-jazzy-tl-expected。 准备解压 .../3-ros-jazzy-tl-expected_1.0.2-5noble.20240702.041512_amd64.deb ... 正在解压 ros-jazzy-tl-expected (1.0.2-5noble.20240702.041512) ... 正在选中未选择的软件包 ros-jazzy-rsl。 准备解压 .../4-ros-jazzy-rsl_1.1.0-3noble.20240703.162115_amd64.deb ... 正在解压 ros-jazzy-rsl (1.1.0-3noble.20240703.162115) ... 正在选中未选择的软件包 ros-jazzy-parameter-traits。 准备解压 .../5-ros-jazzy-parameter-traits_0.3.8-4noble.20240703.174706_amd64.deb ... 正在解压 ros-jazzy-parameter-traits (0.3.8-4noble.20240703.174706) ... 正在选中未选择的软件包 ros-jazzy-generate-parameter-library。 准备解压 .../6-ros-jazzy-generate-parameter-library_0.3.8-4noble.20240703.174853_amd64.deb ... 正在解压 ros-jazzy-generate-parameter-library (0.3.8-4noble.20240703.174853) ... 正在选中未选择的软件包 ros-jazzy-joint-state-broadcaster。 准备解压 .../7-ros-jazzy-joint-state-broadcaster_4.9.0-1noble.20240703.175307_amd64.deb ... 正在解压 ros-jazzy-joint-state-broadcaster (4.9.0-1noble.20240703.175307) ... 正在设置 python3-typeguard (4.1.5-1) ... 正在设置 ros-jazzy-tcb-span (1.0.2-5noble.20240702.041437) ... 正在设置 ros-jazzy-generate-parameter-library-py (0.3.8-4noble.20240702.041832) ... 正在设置 ros-jazzy-tl-expected (1.0.2-5noble.20240702.041512) ... 正在设置 ros-jazzy-rsl (1.1.0-3noble.20240703.162115) ... 正在设置 ros-jazzy-parameter-traits (0.3.8-4noble.20240703.174706) ... 正在设置 ros-jazzy-generate-parameter-library (0.3.8-4noble.20240703.174853) ... 正在设置 ros-jazzy-joint-state-broadcaster (4.9.0-1noble.20240703.175307) ... executing command [sudo -H apt-get install ros-jazzy-vision-msgs] 正在读取软件包列表... 完成 正在分析软件包的依赖关系树... 完成 正在读取状态信息... 完成 下列【新】软件包将被安装: ros-jazzy-vision-msgs 升级了 0 个软件包,新安装了 1 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 需要下载 181 kB 的归档。 解压缩后会消耗 2,524 kB 的额外空间。 获取:1 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-vision-msgs amd64 4.1.1-3noble.20240702.061756 [181 kB] 已下载 181 kB,耗时 5秒 (37.7 kB/s) 正在选中未选择的软件包 ros-jazzy-vision-msgs。 (正在读取数据库 ... 系统当前共安装有 388642 个文件和目录。) 准备解压 .../ros-jazzy-vision-msgs_4.1.1-3noble.20240702.061756_amd64.deb ... 正在解压 ros-jazzy-vision-msgs (4.1.1-3noble.20240702.061756) ... 正在设置 ros-jazzy-vision-msgs (4.1.1-3noble.20240702.061756) ... executing command [sudo -H apt-get install ros-jazzy-control-msgs] 正在读取软件包列表... 完成 正在分析软件包的依赖关系树... 完成 正在读取状态信息... 完成 ros-jazzy-control-msgs 已经是最新版 (5.2.0-1noble.20240702.064807)。 ros-jazzy-control-msgs 已设置为手动安装。 升级了 0 个软件包,新安装了 0 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 executing command [sudo -H apt-get install ros-jazzy-joint-trajectory-controller] 正在读取软件包列表... 完成 正在分析软件包的依赖关系树... 完成 正在读取状态信息... 完成 将会同时安装下列软件: ros-jazzy-angles ros-jazzy-control-toolbox ros-jazzy-filters 下列【新】软件包将被安装: ros-jazzy-angles ros-jazzy-control-toolbox ros-jazzy-filters ros-jazzy-joint-trajectory-controller 升级了 0 个软件包,新安装了 4 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 需要下载 446 kB 的归档。 解压缩后会消耗 2,063 kB 的额外空间。 您希望继续执行吗?[Y/n] y 获取:1 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-angles amd64 1.16.0-5noble.20240702.040025 [13.7 kB] 获取:2 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-filters amd64 2.1.2-2noble.20240703.160021 [78.3 kB] 获取:3 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-control-toolbox amd64 3.2.0-3noble.20240703.175102 [95.1 kB] 获取:4 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-joint-trajectory-controller amd64 4.9.0-1noble.20240703.175425 [259 kB] 已下载 446 kB,耗时 56秒 (8,030 B/s) 正在选中未选择的软件包 ros-jazzy-angles。 (正在读取数据库 ... 系统当前共安装有 389079 个文件和目录。) 准备解压 .../ros-jazzy-angles_1.16.0-5noble.20240702.040025_amd64.deb ... 正在解压 ros-jazzy-angles (1.16.0-5noble.20240702.040025) ... 正在选中未选择的软件包 ros-jazzy-filters。 准备解压 .../ros-jazzy-filters_2.1.2-2noble.20240703.160021_amd64.deb ... 正在解压 ros-jazzy-filters (2.1.2-2noble.20240703.160021) ... 正在选中未选择的软件包 ros-jazzy-control-toolbox。 准备解压 .../ros-jazzy-control-toolbox_3.2.0-3noble.20240703.175102_amd64.deb ... 正在解压 ros-jazzy-control-toolbox (3.2.0-3noble.20240703.175102) ... 正在选中未选择的软件包 ros-jazzy-joint-trajectory-controller。 准备解压 .../ros-jazzy-joint-trajectory-controller_4.9.0-1noble.20240703.175425_amd64.deb ... 正在解压 ros-jazzy-joint-trajectory-controller (4.9.0-1noble.20240703.175425) ... 正在设置 ros-jazzy-filters (2.1.2-2noble.20240703.160021) ... 正在设置 ros-jazzy-angles (1.16.0-5noble.20240702.040025) ... 正在设置 ros-jazzy-control-toolbox (3.2.0-3noble.20240703.175102) ... 正在设置 ros-jazzy-joint-trajectory-controller (4.9.0-1noble.20240703.175425) ... executing command [sudo -H apt-get install python3-opencv] 正在读取软件包列表... 完成 正在分析软件包的依赖关系树... 完成 正在读取状态信息... 完成 下列【新】软件包将被安装: python3-opencv 升级了 0 个软件包,新安装了 1 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 需要下载 1,826 kB 的归档。 解压缩后会消耗 8,312 kB 的额外空间。 获取:1 http://archive.ubuntu.com/ubuntu noble/universe amd64 python3-opencv amd64 4.6.0+dfsg-13.1ubuntu1 [1,826 kB] 已下载 1,826 kB,耗时 5秒 (379 kB/s) 正在选中未选择的软件包 python3-opencv:amd64。 (正在读取数据库 ... 系统当前共安装有 389255 个文件和目录。) 准备解压 .../python3-opencv_4.6.0+dfsg-13.1ubuntu1_amd64.deb ... 正在解压 python3-opencv:amd64 (4.6.0+dfsg-13.1ubuntu1) ... 正在设置 python3-opencv:amd64 (4.6.0+dfsg-13.1ubuntu1) ... executing command [sudo -H apt-get install ros-jazzy-ackermann-msgs] 正在读取软件包列表... 完成 正在分析软件包的依赖关系树... 完成 正在读取状态信息... 完成 下列【新】软件包将被安装: ros-jazzy-ackermann-msgs 升级了 0 个软件包,新安装了 1 个软件包,要卸载 0 个软件包,有 0 个软件包未被升级。 需要下载 51.2 kB 的归档。 解压缩后会消耗 583 kB 的额外空间。 获取:1 http://packages.ros.org/ros2/ubuntu noble/main amd64 ros-jazzy-ackermann-msgs amd64 2.0.2-6noble.20240702.050856 [51.2 kB] 已下载 51.2 kB,耗时 3秒 (17.1 kB/s) 正在选中未选择的软件包 ros-jazzy-ackermann-msgs。 (正在读取数据库 ... 系统当前共安装有 389259 个文件和目录。) 准备解压 .../ros-jazzy-ackermann-msgs_2.0.2-6noble.20240702.050856_amd64.deb ... 正在解压 ros-jazzy-ackermann-msgs (2.0.2-6noble.20240702.050856) ... 正在设置 ros-jazzy-ackermann-msgs (2.0.2-6noble.20240702.050856) ... #All required rosdeps installed successfully cxy@ubuntu2404-cxy:~/ros2_ws$ colcon build Starting >>> webots_ros2_importer Starting >>> webots_ros2_msgs Starting >>> turtlesim Starting >>> custom_action_interfaces Starting >>> polygon_base Starting >>> rviz_plugin_tutorial_msgs Starting >>> urdf_launch Starting >>> bag_recorder_nodes Starting >>> bag_recorder_nodes_py Starting >>> cpp_parameter_event_handler Starting >>> cpp_parameters Starting >>> cpp_pubsub Finished <<< urdf_launch [1.82s] Starting >>> cpp_srvcli Finished <<< polygon_base [1.95s] Starting >>> examples_rclcpp_async_client Finished <<< bag_recorder_nodes [1.92s] Starting >>> examples_rclcpp_cbg_executor Finished <<< cpp_parameters [1.91s] Finished <<< cpp_parameter_event_handler [1.95s] Starting >>> examples_rclcpp_minimal_action_client Starting >>> examples_rclcpp_minimal_action_server Finished <<< cpp_pubsub [2.05s] Starting >>> examples_rclcpp_minimal_client Finished <<< cpp_srvcli [0.54s] Starting >>> examples_rclcpp_minimal_composition Finished <<< examples_rclcpp_async_client [0.53s] Starting >>> examples_rclcpp_minimal_publisher Finished <<< examples_rclcpp_cbg_executor [0.52s] Starting >>> examples_rclcpp_minimal_service Finished <<< examples_rclcpp_minimal_action_server [0.58s] Finished <<< examples_rclcpp_minimal_action_client [0.64s] Starting >>> examples_rclcpp_minimal_subscriber Starting >>> examples_rclcpp_minimal_timer Finished <<< examples_rclcpp_minimal_client [0.66s] Finished <<< custom_action_interfaces [2.96s] Finished <<< rviz_plugin_tutorial_msgs [2.92s] Starting >>> examples_rclcpp_multithreaded_executor Starting >>> examples_rclcpp_wait_set Starting >>> examples_rclpy_executors Finished <<< examples_rclcpp_minimal_composition [1.48s] Finished <<< webots_ros2_msgs [4.00s] Finished <<< turtlesim [3.99s] Starting >>> examples_rclpy_guard_conditions Starting >>> examples_rclpy_minimal_action_client Starting >>> examples_rclpy_minimal_action_server Finished <<< examples_rclcpp_minimal_publisher [1.59s] Starting >>> examples_rclpy_minimal_client Finished <<< examples_rclcpp_minimal_service [3.31s] Starting >>> examples_rclpy_minimal_publisher Finished <<< examples_rclcpp_minimal_timer [3.09s] Finished <<< webots_ros2_importer [6.07s] Finished <<< bag_recorder_nodes_py [5.84s] Finished <<< examples_rclcpp_minimal_subscriber [3.22s] Starting >>> webots_ros2_driver Starting >>> examples_rclpy_minimal_service Starting >>> examples_rclpy_minimal_subscriber Starting >>> examples_rclpy_pointcloud_publisher Finished <<< examples_rclcpp_wait_set [4.84s] Starting >>> geometry_tutorials Finished <<< examples_rclcpp_multithreaded_executor [6.75s] Finished <<< examples_rclpy_executors [6.66s] Starting >>> launch_testing_examples Starting >>> launch_tutorial Finished <<< examples_rclpy_minimal_action_client [8.17s] Starting >>> more_interfaces Finished <<< examples_rclpy_minimal_action_server [8.30s] Starting >>> my_package Finished <<< examples_rclpy_guard_conditions [8.44s] Starting >>> py_pubsub Finished <<< geometry_tutorials [3.88s] Starting >>> py_srvcli Finished <<< examples_rclpy_minimal_client [8.81s] Finished <<< examples_rclpy_minimal_publisher [8.76s] Starting >>> python_parameter_event_handler Starting >>> python_parameters Finished <<< examples_rclpy_minimal_subscriber [8.72s] Starting >>> sync_async_node_example_cpp Finished <<< examples_rclpy_minimal_service [8.85s] Starting >>> tutorial_interfaces Finished <<< examples_rclpy_pointcloud_publisher [10.5s] Starting >>> bag_reading_cpp Finished <<< my_package [4.32s] Finished <<< launch_testing_examples [6.93s] Starting >>> custom_action_cpp Starting >>> learning_tf2_cpp Finished <<< more_interfaces [4.65s] Starting >>> learning_tf2_py Finished <<< launch_tutorial [7.18s] Starting >>> polygon_plugins Finished <<< sync_async_node_example_cpp [3.27s] Starting >>> rviz_plugin_tutorial Finished <<< webots_ros2_driver [12.2s] Finished <<< bag_reading_cpp [1.55s] Starting >>> webots_ros2_control Starting >>> webots_ros2_mavic Finished <<< custom_action_cpp [1.62s] Starting >>> webots_ros2_tesla Finished <<< learning_tf2_cpp [2.47s] Starting >>> turtle_tf2_cpp Finished <<< py_srvcli [5.69s] Finished <<< py_pubsub [6.85s] Starting >>> turtle_tf2_py Starting >>> urdf_tutorial Finished <<< polygon_plugins [4.20s] Finished <<< rviz_plugin_tutorial [3.14s] Finished <<< tutorial_interfaces [6.38s] Finished <<< urdf_tutorial [1.30s] Finished <<< turtle_tf2_cpp [2.11s] Finished <<< python_parameters [6.95s] Finished <<< python_parameter_event_handler [7.06s] Finished <<< learning_tf2_py [5.14s] Finished <<< webots_ros2_mavic [5.14s] Finished <<< webots_ros2_tesla [5.41s] Finished <<< turtle_tf2_py [4.42s] Finished <<< webots_ros2_control [13.4s] Starting >>> webots_ros2_epuck Starting >>> webots_ros2_tiago Starting >>> webots_ros2_turtlebot Starting >>> webots_ros2_universal_robot Finished <<< webots_ros2_tiago [5.43s] Finished <<< webots_ros2_epuck [5.58s] Finished <<< webots_ros2_turtlebot [5.54s] Finished <<< webots_ros2_universal_robot [5.57s] Starting >>> webots_ros2_tests Finished <<< webots_ros2_tests [3.43s] Starting >>> webots_ros2 Finished <<< webots_ros2 [3.47s] Summary: 64 packages finished [44.6s]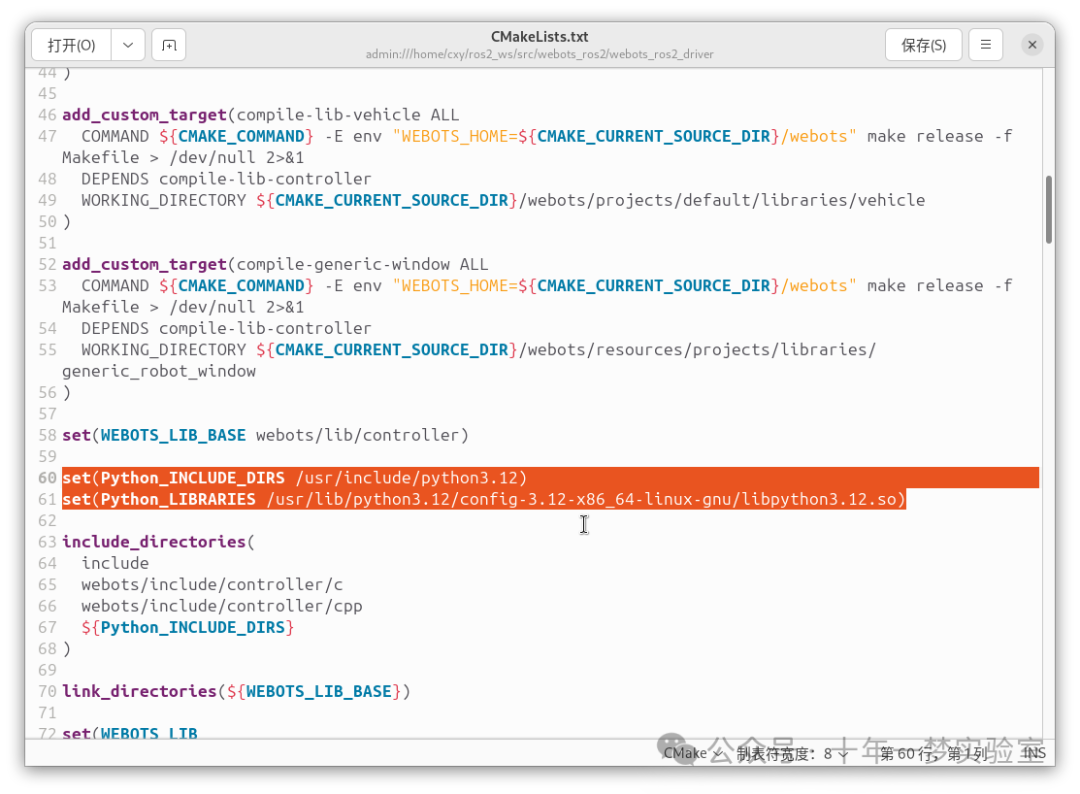
如果构建报错 修改 webots_ros2_driver 的CMakeLists.txt ,添加以下set
set(Python_INCLUDE_DIRS /usr/include/python3.12) set(Python_LIBRARIES /usr/lib/python3.12/config-3.12-x86_64-linux-gnu/libpython3.12.so)colcon build2 启动 webots_ros2_universal_robot 示例
以下说明解释了如何启动提供的示例。
首先配置 ROS 2 环境,如果尚未完成。
source /opt/ros/jazzy/setup.bash设置 WEBOTS_HOME 环境变量允许您启动特定的 Webots 安装。
export WEBOTS_HOME=/usr/local/webots如果从源代码安装,请在尚未完成的情况下,配置您的 ROS 2 工作区。
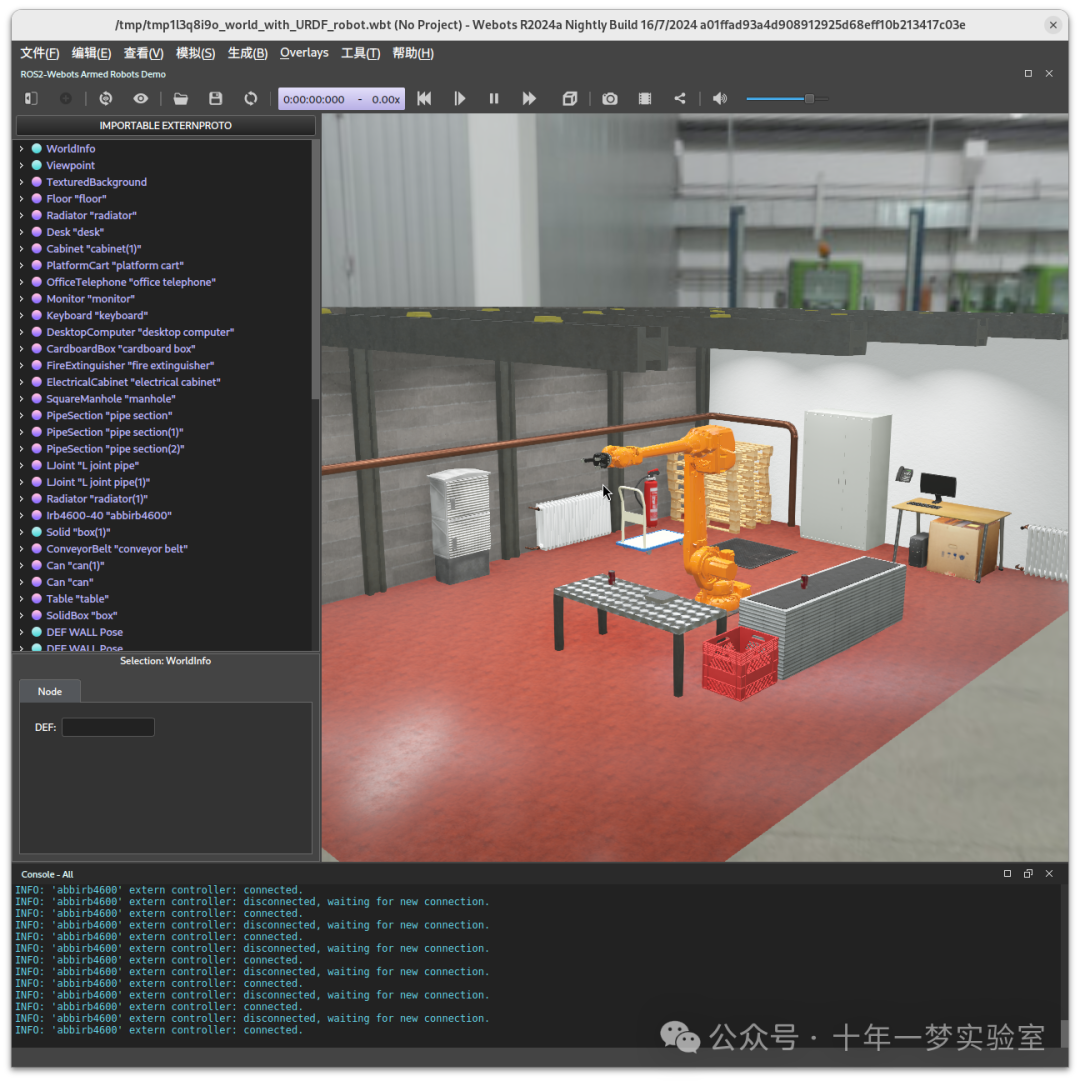
cd ~/ros2_ws source install/local_setup.bash使用 ROS 2 启动命令来启动演示包(例如 webots_ros2_universal_robot )。
source /opt/ros/jazzy/setup.bash ros2 launch webots_ros2_universal_robot multirobot_launch.py
webot安装参考:
https://cyberbotics.com/doc/guide/installation-procedure
https://cyberbotics.com/
https://github.com/cyberbotics/webots/releases
