
阅读量:4


声明:我们跳过mujoco环境的搭建,搭建环境不难,可自行百度
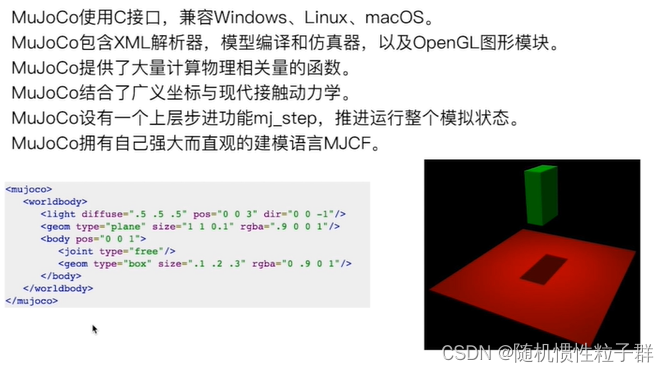
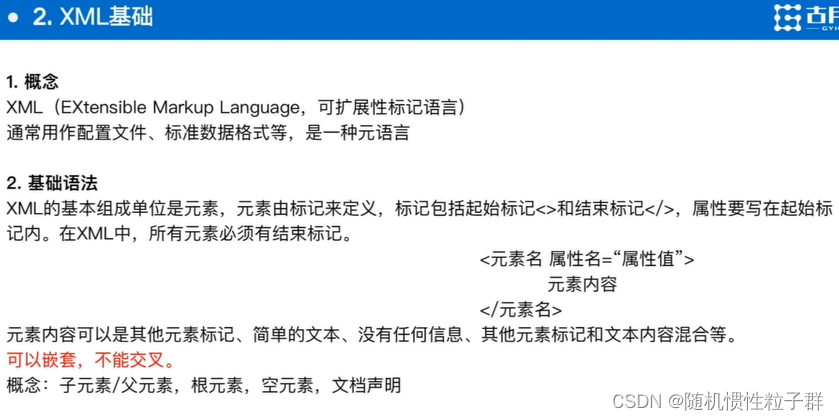
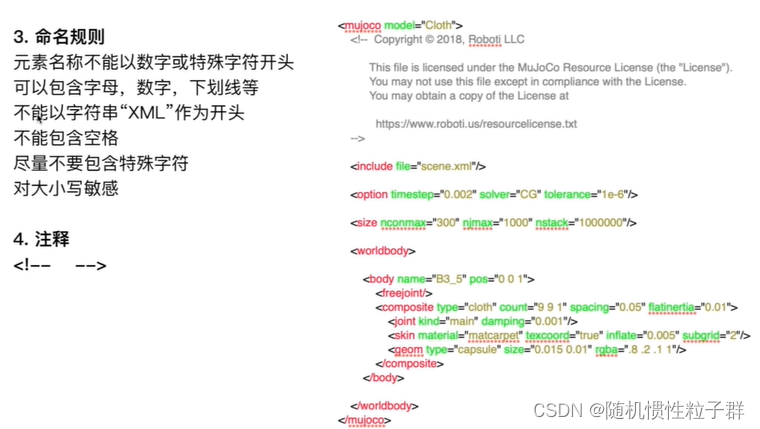
下面开始进入正题(需要有一定的python基础与xml基础):
下面进入到建立机器人模型的部分:
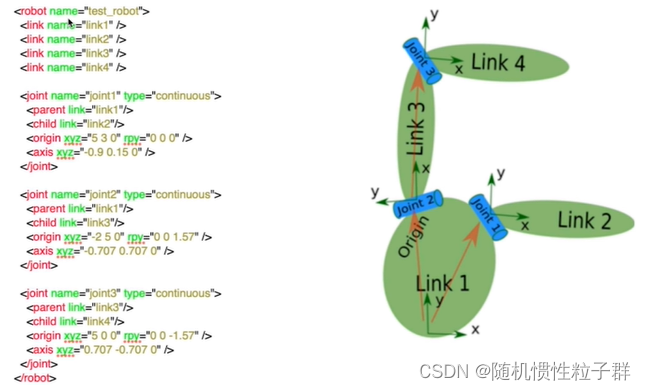
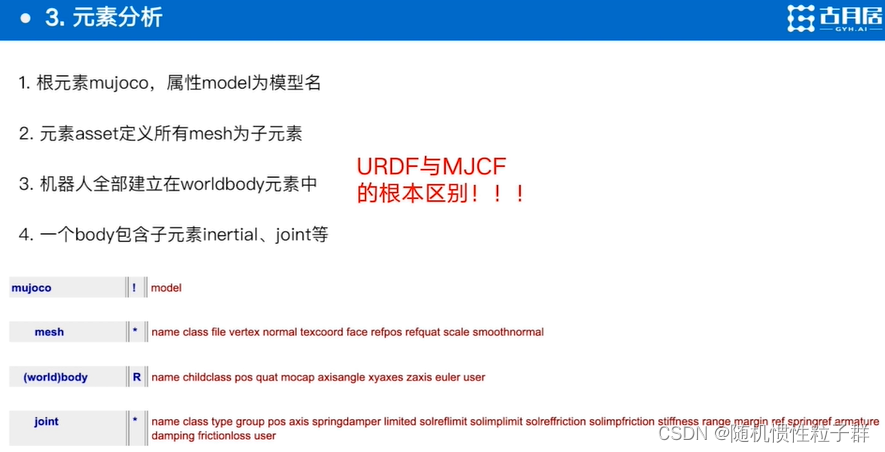
需要先介绍URDF模型文件和导出MJCF格式




介绍完毕,下面开始进行mujoco仿真:
首先将这4个文件复制到.mujoco/mujoco210/bin文件夹中: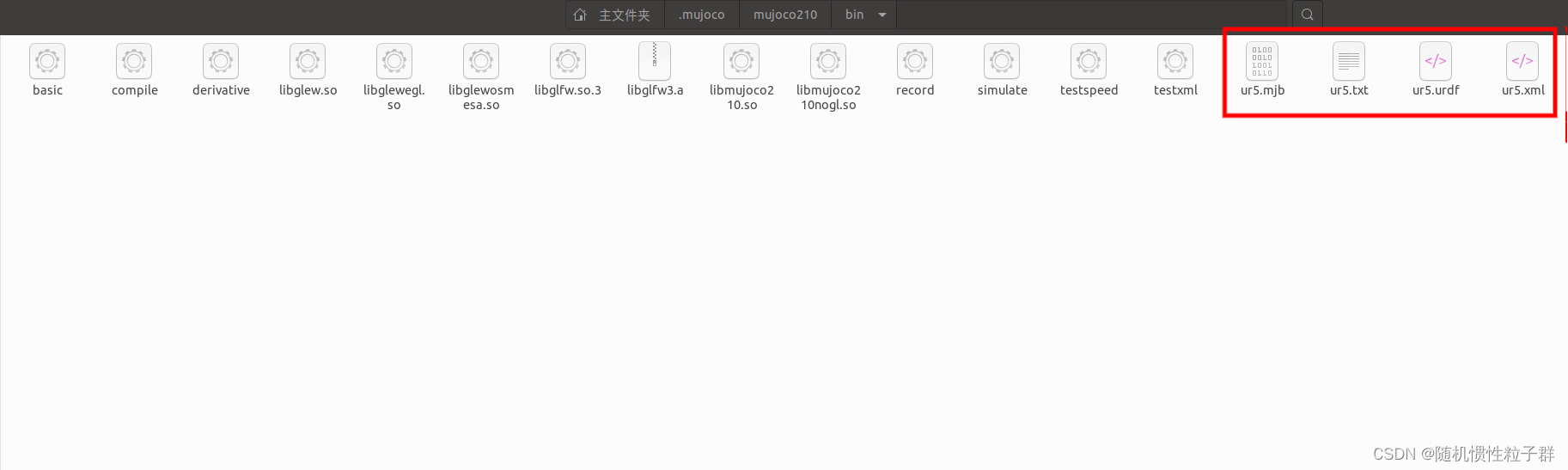
接着讲ur5的模型stl文件放置在.mujoco/mujoco210文件夹中: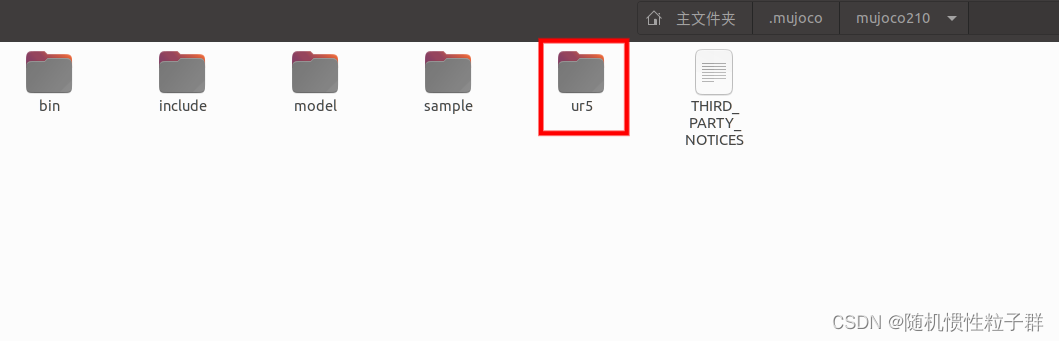
进入bin文件夹中开启一个终端输入:
./simulate ur5.xml
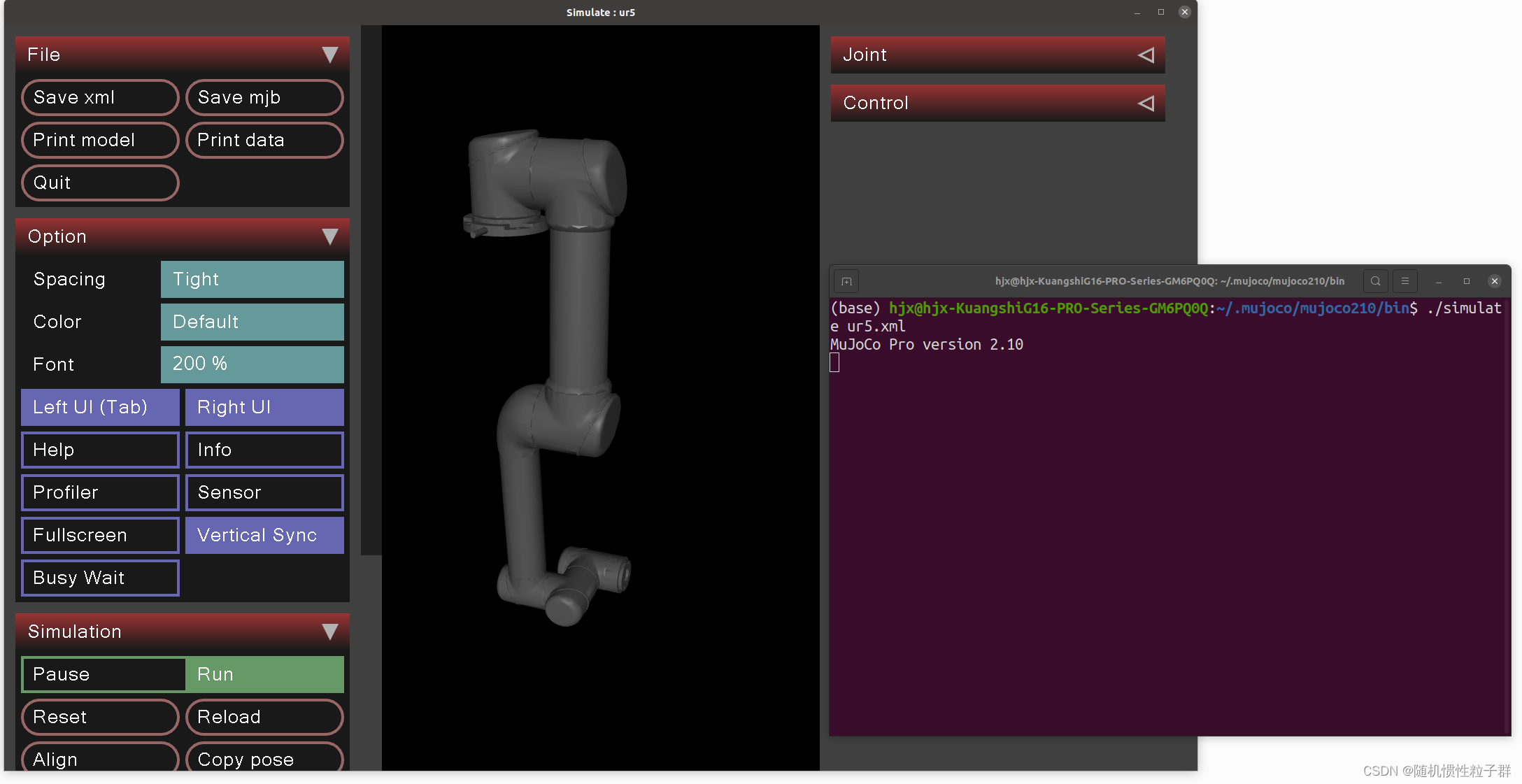
出现机械臂的模型可视化,下面讨论该如何进行控制:
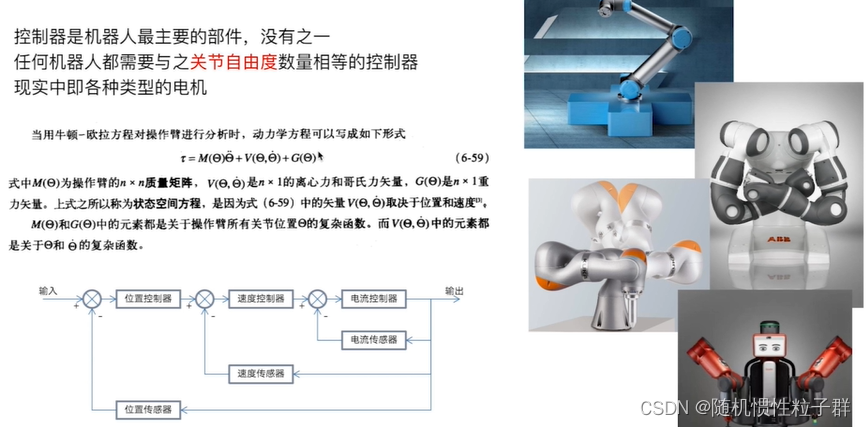
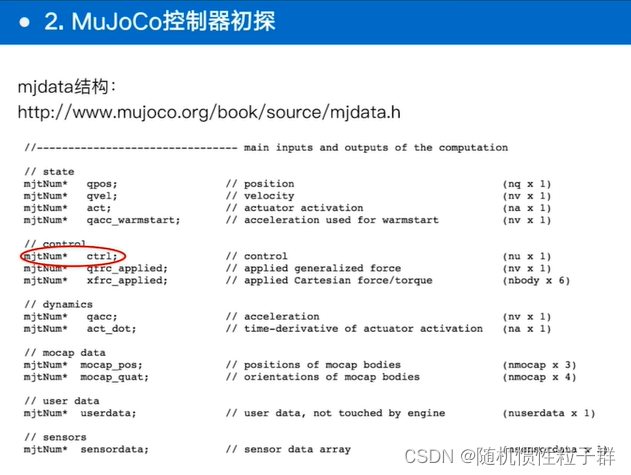
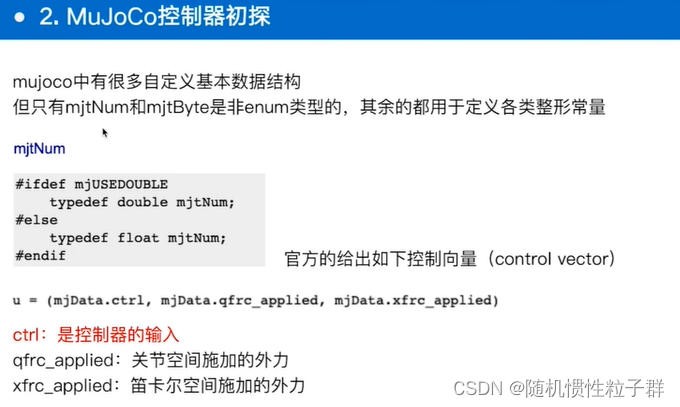
开始介绍控制器接口:
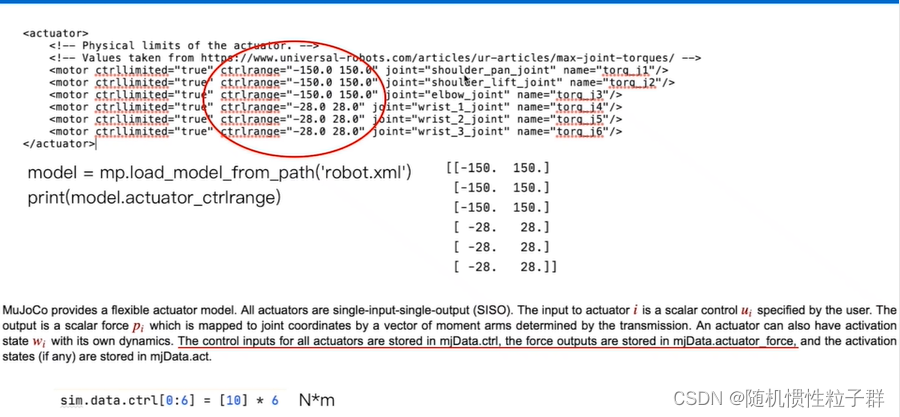
下面利用mujoco.py接口导入模型,并尝试施加控制器输入:
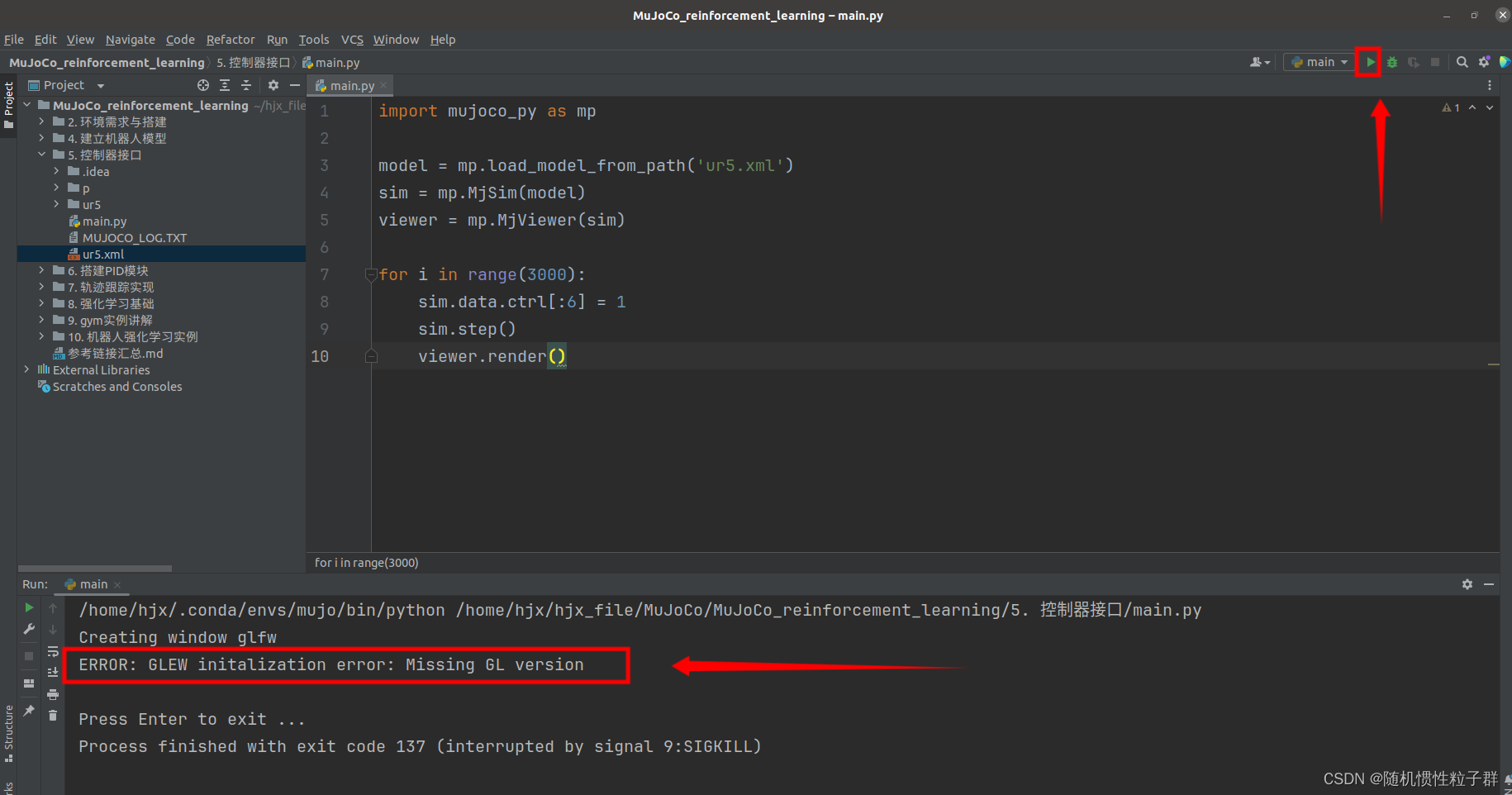
在运行main.py文件时,出现了一个报错,下面解决这个问题:
检查您的系统是否安装了OpenGL库,例如 libgl1-mesa-glx 和 libgl1-mesa-dri(对于linux的系统)。
打开终端: 在您的 Linux 系统上打开一个终端窗口。
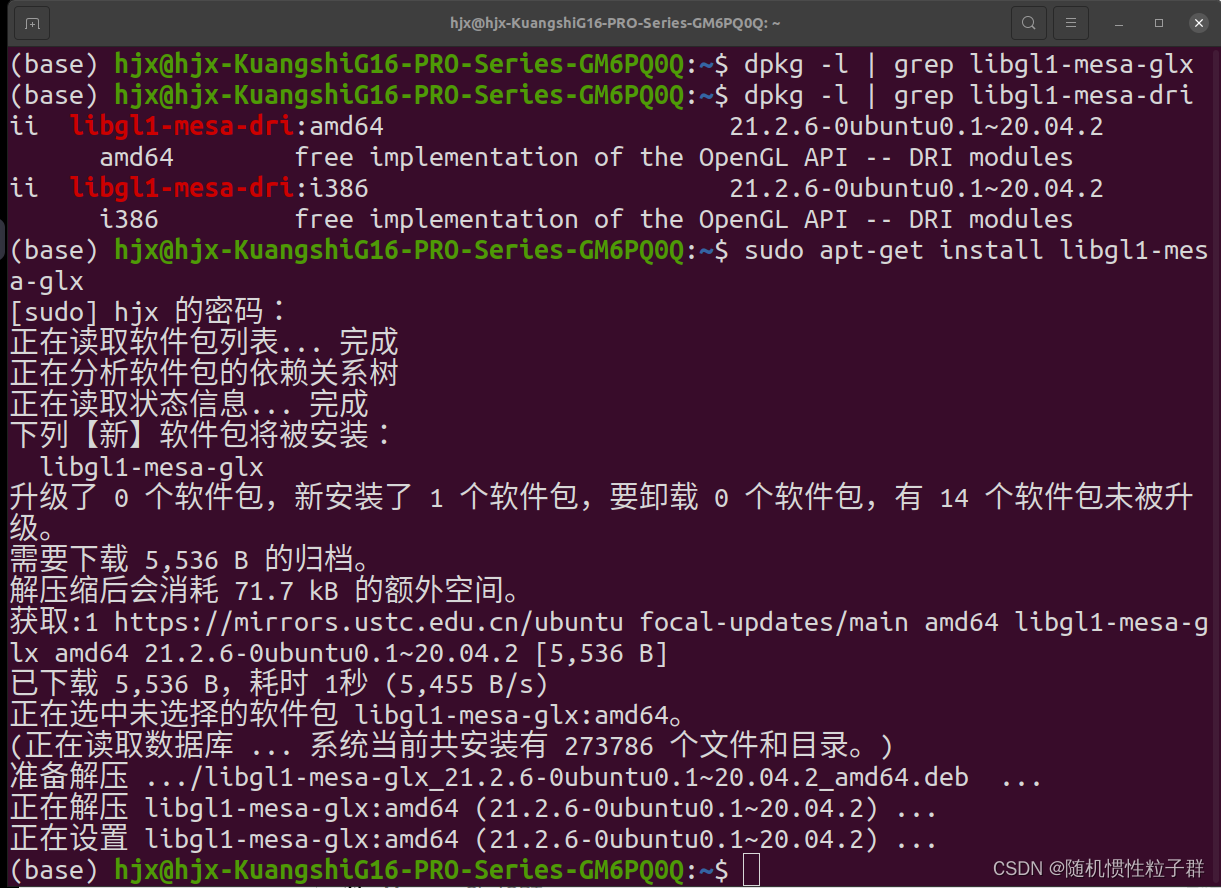
检查
libgl1-mesa-glx库: 使用以下命令来检查libgl1-mesa-glx库是否已安装:
dpkg -l | grep libgl1-mesa-glx
如果这个库已安装,您将看到列表中的条目和版本信息。如果没有列出,则表示这个库尚未安装。
- 检查
libgl1-mesa-dri库: 使用以下命令来检查libgl1-mesa-dri库是否已安装:
dpkg -l | grep libgl1-mesa-dri
同样,如果已安装,您将在列表中看到相关信息。
如果您发现这些库未安装,您可以使用以下命令来安装它们:
sudo apt-get update
sudo apt-get install libgl1-mesa-glx libgl1-mesa-dri
上面的这个可能不是最佳的解决方案
如果这个问题还是没有解决的话,可以尝试下面的解决方案:
解决报错:Creating window glfw ERROR: GLEW initalization error: Missing GL version-CSDN博客
下面我根据这个博客最终解决了这个报错:
Creating window glfw ERROR: GLEW initalization error: Missing GL version
解决方法:
1.配置bashrc
gedit ~/.bashrc
在文档最后一行加入下面代码然后保存退出文档:
export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libGLEW.so
然后source一下bashrc文件:
source ~/.bashrc
2.配置pycharm
点击 pycharm中的 Run->Edit Configurations->Environment variables
然后添加变量Name是LD_PRELOAD,对应的Value是/usr/lib/x86_64-linux-gnu/libGLEW.so,保存退出之后重新运行代码。
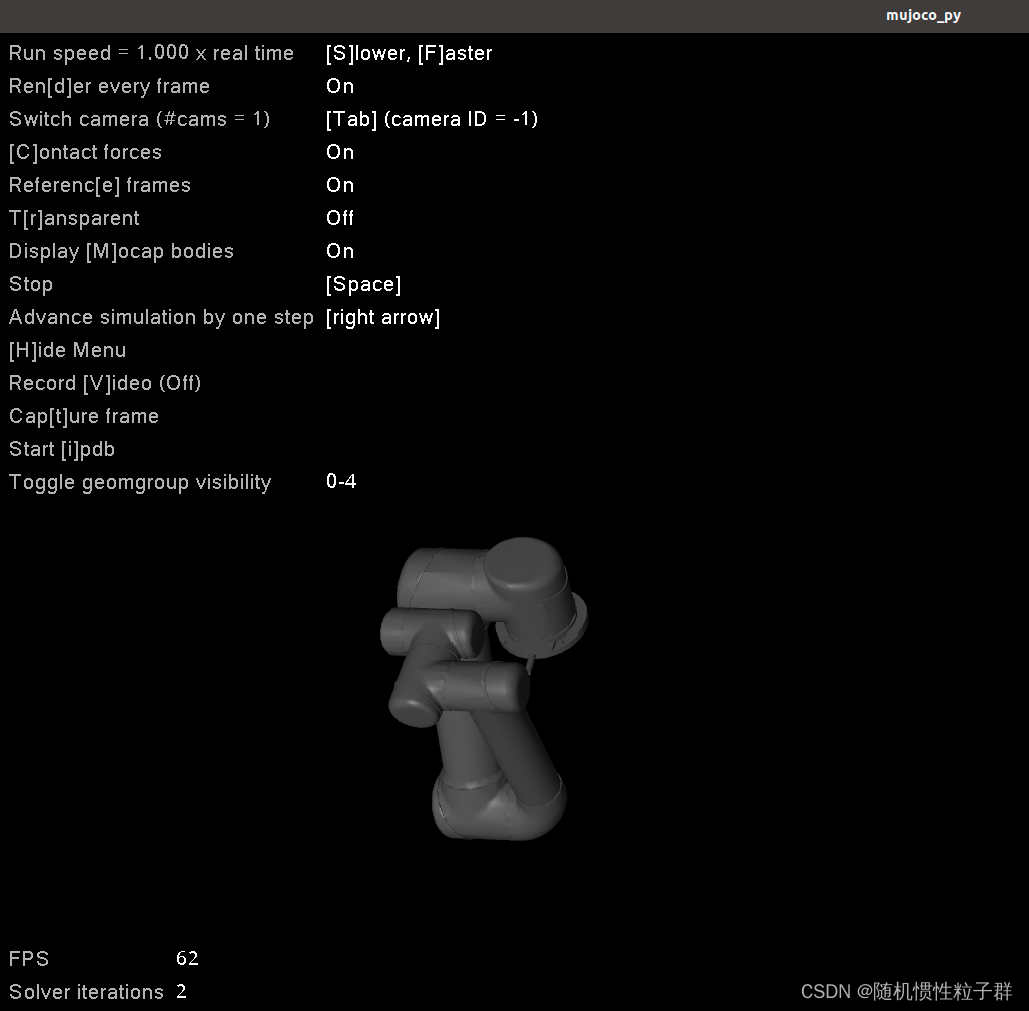
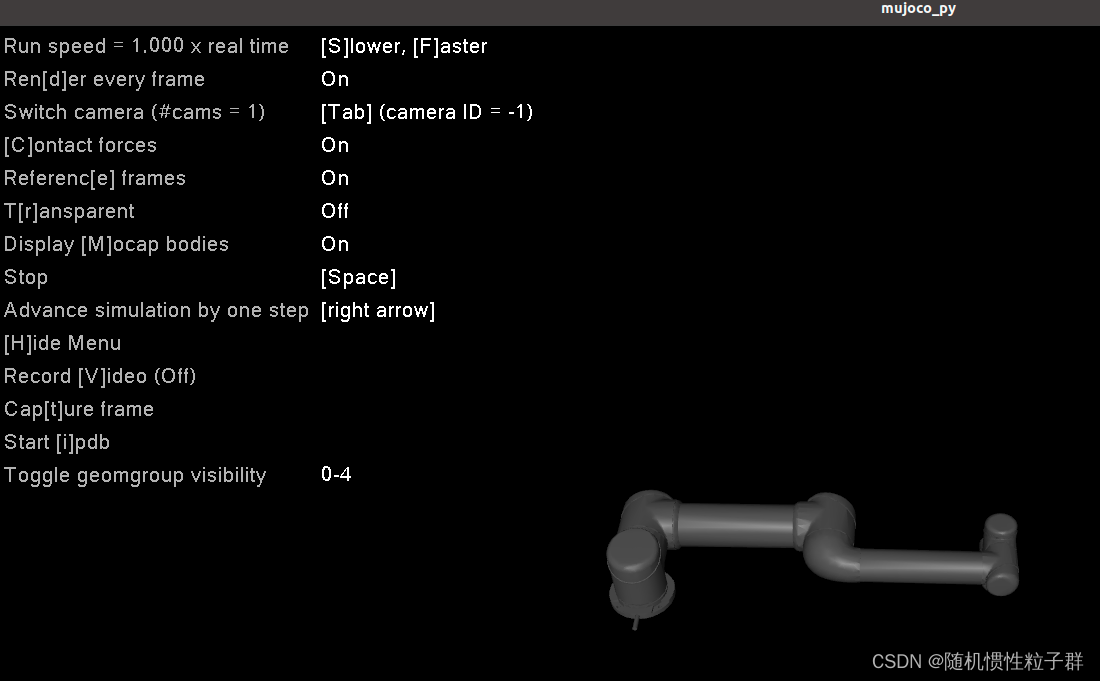
可以看到如下图,出现了正常的仿真画面,pycharm的运行结果:
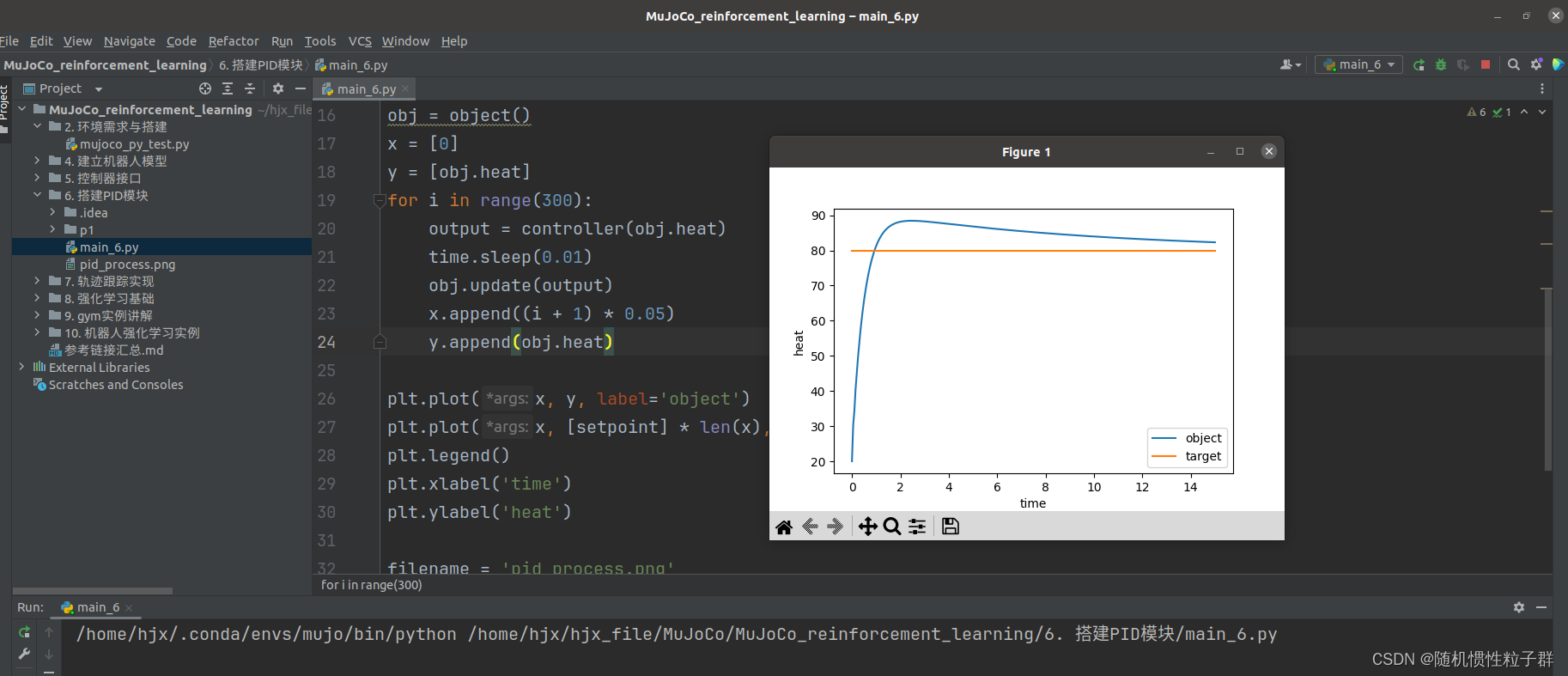
继续下一个环节,搭建PID模块:
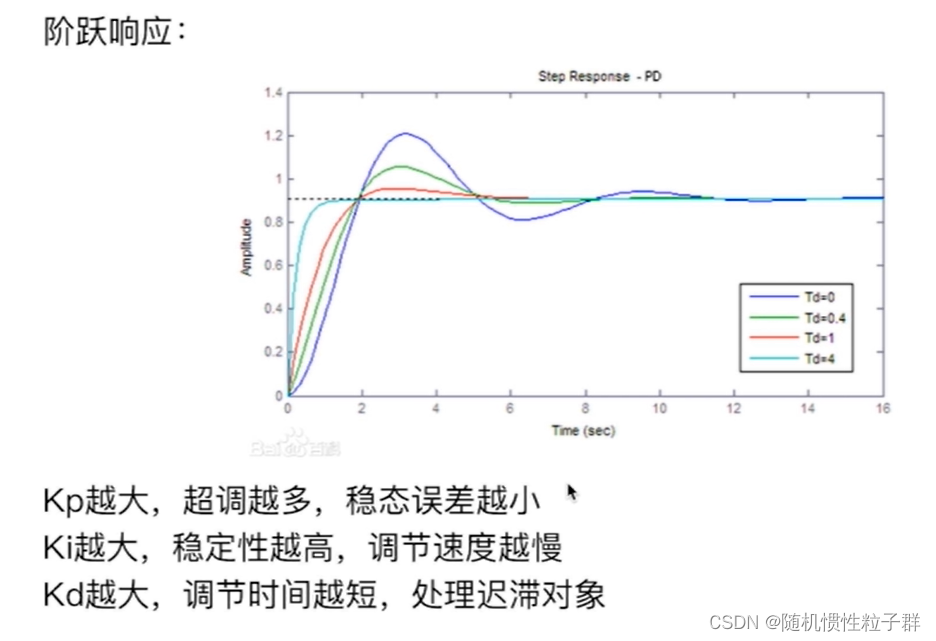
下面以一个简单的示例来展示:
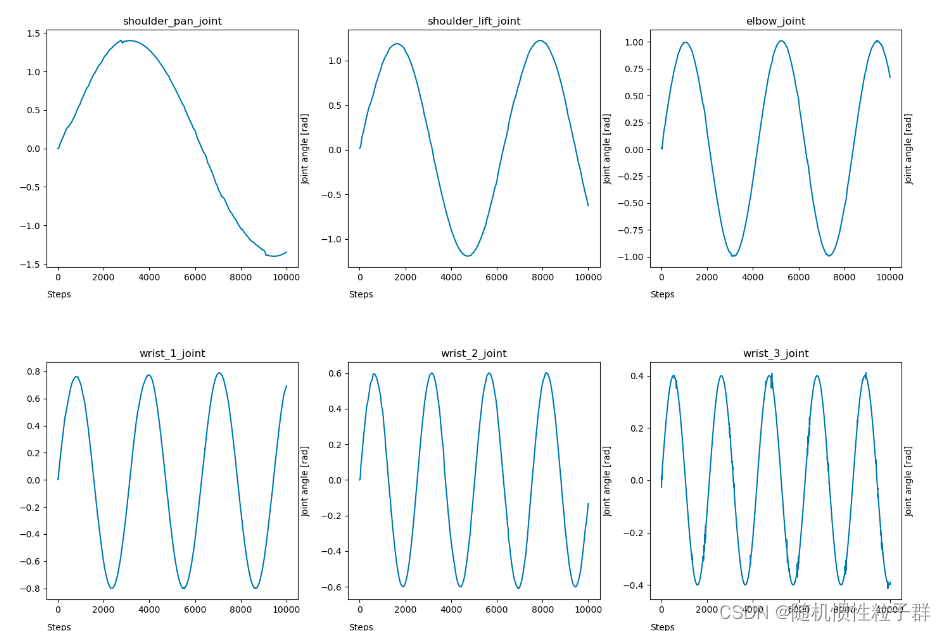
接下来进行轨迹跟踪的实现:
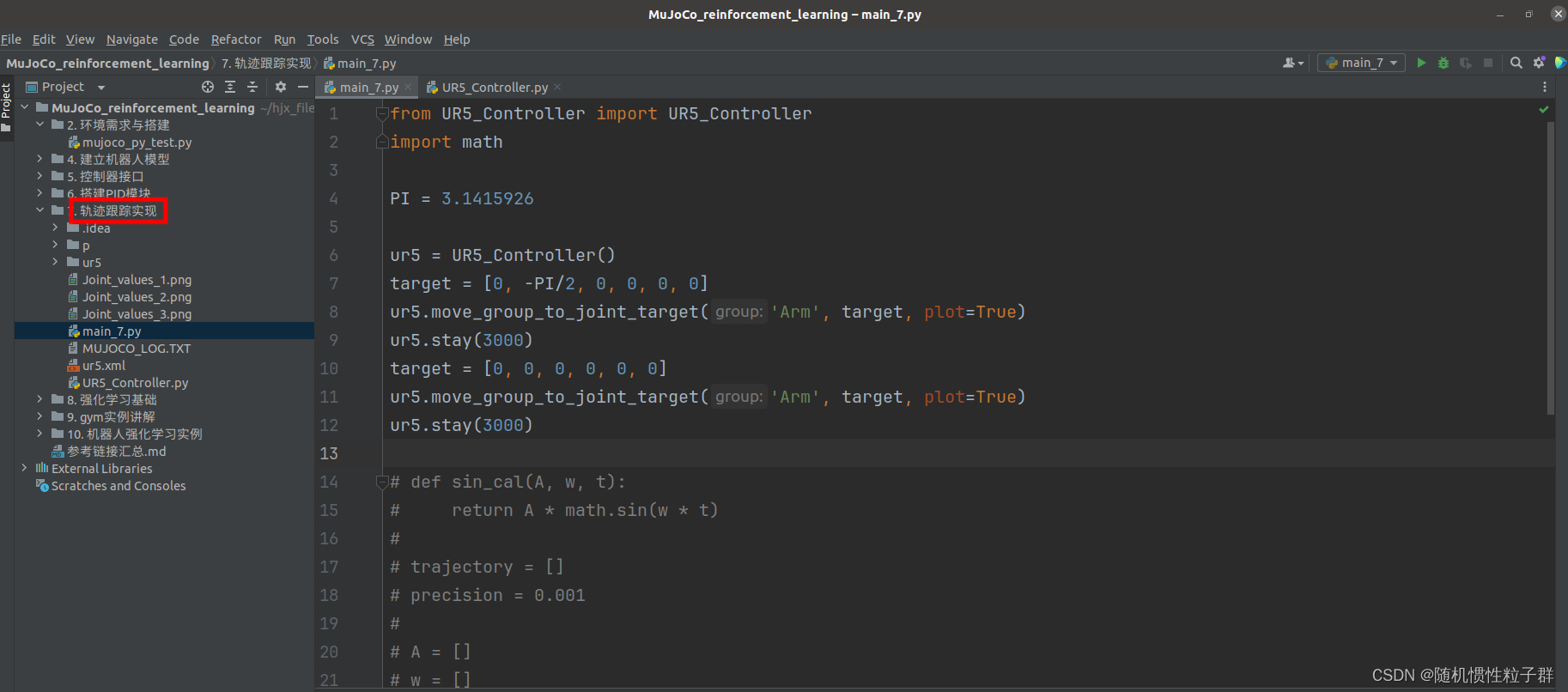
注释上图中的代码直至最后,开始运行(期间机械臂会动态运行),输出:
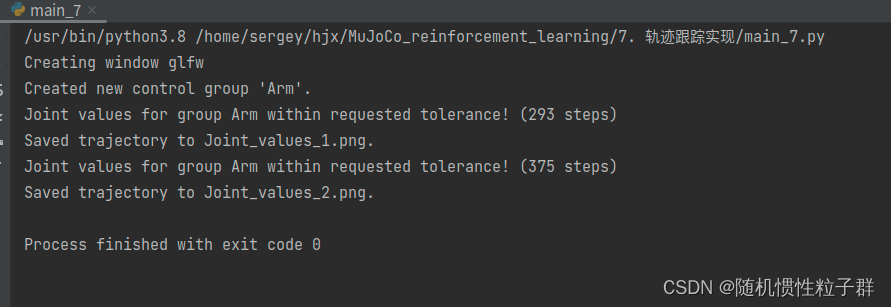
输出了2个图片:
Figure1:
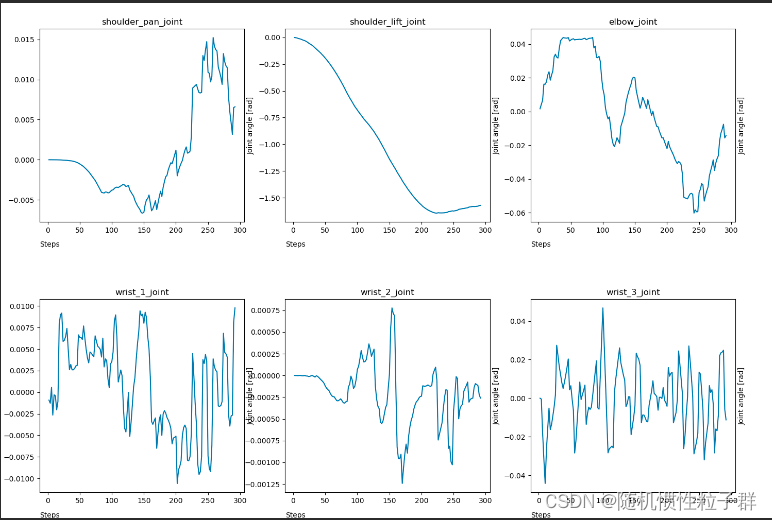
Figure2:
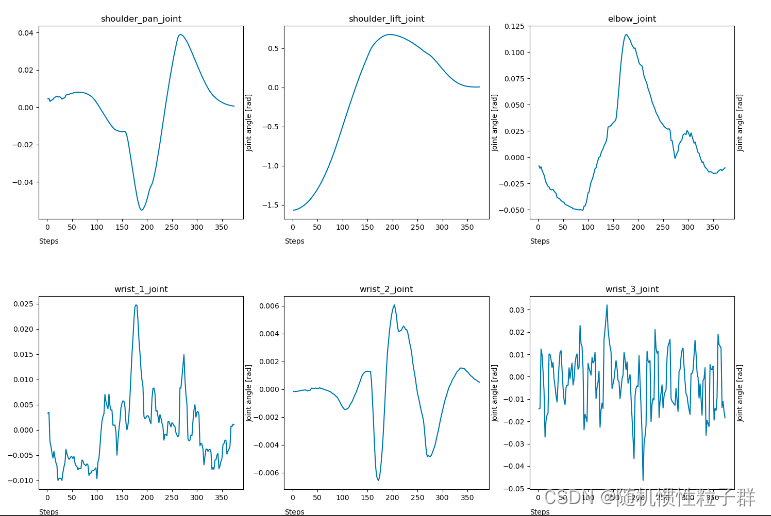
取消代码中的注释,继续运行(期间机械臂会动态运行):
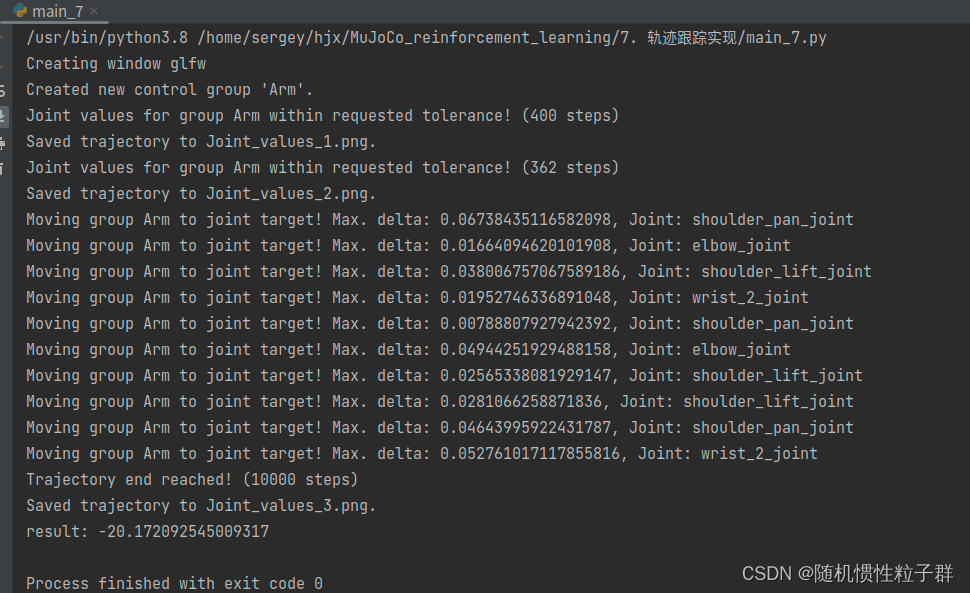
输出了3个图片:
Figure1:
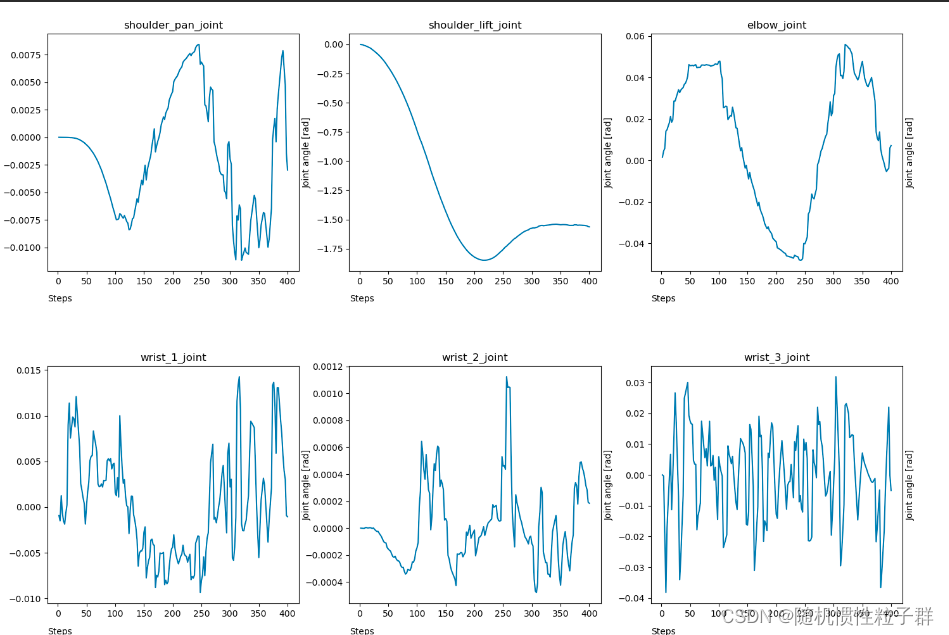
Figure2:
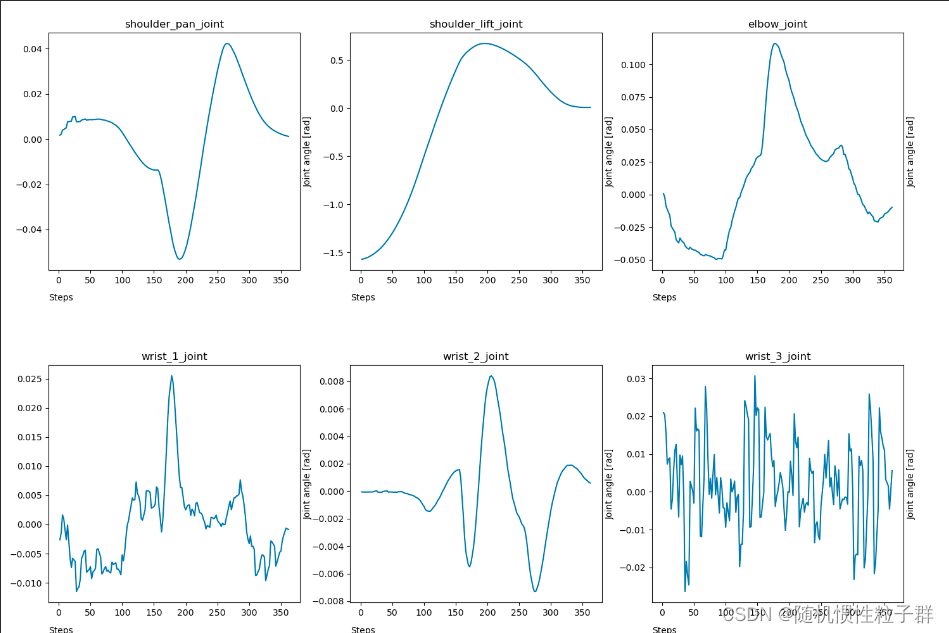
Figure3:
到此结束
