
阅读量:2
YOLOv5+单目测距(python)
相关链接
1. YOLOV7 + 单目测距(python)
2. YOLOV5 + 单目跟踪(python)
3. YOLOV7 + 单目跟踪(python)
4. YOLOV5 + 双目测距(python)
5. YOLOV7 + 双目测距(python)
6. 具体实现效果已在Bilibili发布,点击跳转
本篇博文工程源码下载
链接1:https://download.csdn.net/download/qq_45077760/87708260
链接2:https://github.com/up-up-up-up/yolov5_Monocular_ranging
更多有关单目(尺寸测量,跟踪、碰撞检测等)的文章请见:https://blog.csdn.net/qq_45077760/category_12312107.html
1. 相关配置
系统:win 10
YOLO版本:yolov5 6.1
拍摄视频设备:安卓手机
电脑显卡:NVIDIA 2080Ti(CPU也可以跑,GPU只是起到加速推理效果)
2. 测距原理
单目测距原理相较于双目十分简单,无需进行立体匹配,仅需利用下边公式线性转换即可:
D = (F*W)/P 其中D是目标到摄像机的距离, F是摄像机焦距(焦距需要自己进行标定获取), W是目标的宽度或者高度(行人检测一般以人的身高为基准), P是指目标在图像中所占据的像素
了解基本原理后,下边就进行实操阶段
3. 相机标定
3.1:标定方法1
可以参考张友正标定法获取相机的焦距
3.2:标定方法2
直接使用代码获得焦距,需要提前拍摄一个矩形物体,拍摄时候相机固定,距离被拍摄物体自行设定,并一直保持此距离,背景为纯色,不要出现杂物;最后将拍摄的视频用以下代码检测:
import cv2 win_width = 1920 win_height = 1080 mid_width = int(win_width / 2) mid_height = int(win_height / 2) foc = 1990.0 # 根据教程调试相机焦距 real_wid = 9.05 # A4纸横着的时候的宽度,视频拍摄A4纸要横拍,镜头横,A4纸也横 font = cv2.FONT_HERSHEY_SIMPLEX w_ok = 1 capture = cv2.VideoCapture('5.mp4') capture.set(3, win_width) capture.set(4, win_height) while (True): ret, frame = capture.read() # frame = cv2.flip(frame, 1) if ret == False: break gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) gray = cv2.GaussianBlur(gray, (5, 5), 0) ret, binary = cv2.threshold(gray, 140, 200, 60) # 扫描不到纸张轮廓时,要更改阈值,直到方框紧密框住纸张 kernel = cv2.getStructuringElement(cv2.MORPH_RECT, (3, 3)) binary = cv2.dilate(binary, kernel, iterations=2) contours, hierarchy = cv2.findContours(binary, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE) # cv2.drawContours(frame, contours, -1, (0, 255, 0), 2) # 查看所检测到的轮框 for c in contours: if cv2.contourArea(c) < 1000: # 对于矩形区域,只显示大于给定阈值的轮廓,所以一些微小的变化不会显示。对于光照不变和噪声低的摄像头可不设定轮廓最小尺寸的阈值 continue x, y, w, h = cv2.boundingRect(c) # 该函数计算矩形的边界框 if x > mid_width or y > mid_height: continue if (x + w) < mid_width or (y + h) < mid_height: continue if h > w: continue if x == 0 or y == 0: continue if x == win_width or y == win_height: continue w_ok = w cv2.rectangle(frame, (x + 1, y + 1), (x + w_ok - 1, y + h - 1), (0, 255, 0), 2) dis_inch = (real_wid * foc) / (w_ok - 2) dis_cm = dis_inch * 2.54 # os.system("cls") # print("Distance : ", dis_cm, "cm") frame = cv2.putText(frame, "%.2fcm" % (dis_cm), (5, 25), font, 0.8, (0, 255, 0), 2) frame = cv2.putText(frame, "+", (mid_width, mid_height), font, 1.0, (0, 255, 0), 2) cv2.namedWindow('res', 0) cv2.namedWindow('gray', 0) cv2.resizeWindow('res', win_width, win_height) cv2.resizeWindow('gray', win_width, win_height) cv2.imshow('res', frame) cv2.imshow('gray', binary) c = cv2.waitKey(40) if c == 27: # 按退出键esc关闭窗口 break cv2.destroyAllWindows() 反复调节 ret, binary = cv2.threshold(gray, 140, 200, 60)这一行里边的三个参数,直到线条紧紧包裹住你所拍摄视频的物体,然后调整相机焦距直到左上角距离和你拍摄视频时相机到物体的距离接近为止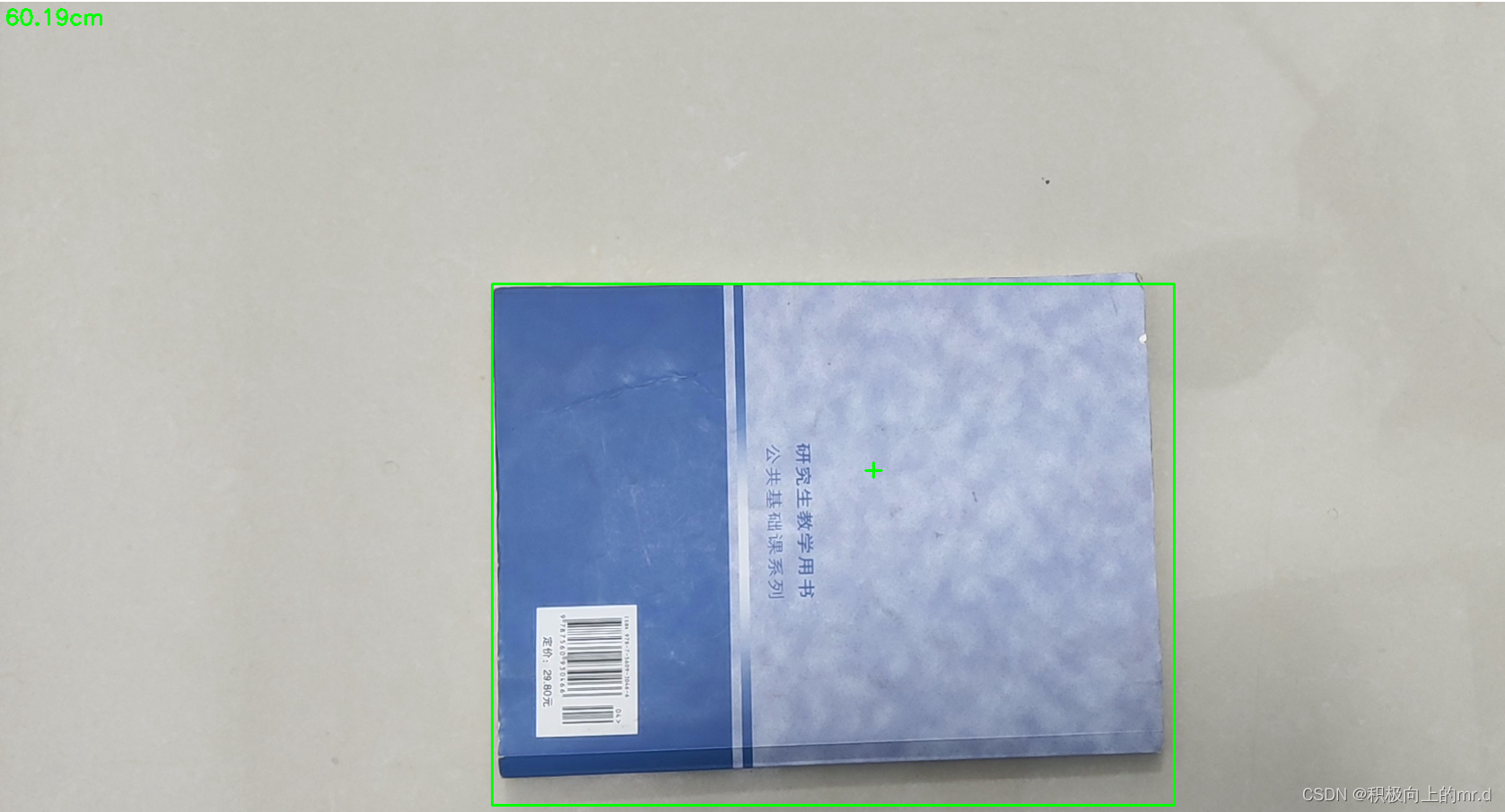
然后将相机焦距写进测距代码distance.py文件里,这里行人用高度表示,根据公式 D = (F*W)/P,知道相机焦距F、行人的高度66.9(单位英寸→170cm/2.54)、像素点距离 h,即可求出相机到物体距离D。 这里用到h-2是因为框的上下边界像素点不接触物体
foc = 1990.0 # 镜头焦距 real_hight_person = 66.9 # 行人高度 real_hight_car = 57.08 # 轿车高度 # 自定义函数,单目测距 def person_distance(h): dis_inch = (real_hight_person * foc) / (h - 2) dis_cm = dis_inch * 2.54 dis_cm = int(dis_cm) dis_m = dis_cm/100 return dis_m def car_distance(h): dis_inch = (real_hight_car * foc) / (h - 2) dis_cm = dis_inch * 2.54 dis_cm = int(dis_cm) dis_m = dis_cm/100 return dis_m 4. 相机测距
4.1 测距添加
主要是把测距部分加在了画框附近,首先提取边框的像素点坐标,然后计算边框像素点高度,在根据 公式 D = (F*W)/P 计算目标距离
for *xyxy, conf, cls in reversed(det): if save_txt: # Write to file xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format with open(txt_path + '.txt', 'a') as f: f.write(('%g ' * len(line)).rstrip() % line + '\n') if save_img or save_crop or view_img: # Add bbox to image x1 = int(xyxy[0]) #获取四个边框坐标 y1 = int(xyxy[1]) x2 = int(xyxy[2]) y2 = int(xyxy[3]) h = y2-y1 if names[int(cls)] == "person": c = int(cls) # integer class 整数类 1111111111 label = None if hide_labels else ( names[c] if hide_conf else f'{names[c]} {conf:.2f}') # 111 dis_m = person_distance(h) # 调用函数,计算行人实际高度 label += f' {dis_m}m' # 将行人距离显示写在标签后 txt = '{0}'.format(label) annotator.box_label(xyxy, txt, color=colors(c, True)) if names[int(cls)] == "car": c = int(cls) # integer class 整数类 1111111111 label = None if hide_labels else ( names[c] if hide_conf else f'{names[c]} {conf:.2f}') # 111 dis_m = car_distance(h) # 调用函数,计算汽车实际高度 label += f' {dis_m}m' # 将汽车距离显示写在标签后 txt = '{0}'.format(label) annotator.box_label(xyxy, txt, color=colors(c, True)) if save_crop: save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True) 4.2 细节修改(可忽略)
到上述步骤就已经实现了单目测距过程,下边是一些小细节修改,可以不看
为了实时显示画面,对运行的py文件点击编辑配置,在形参那里输入–view-img --save-txt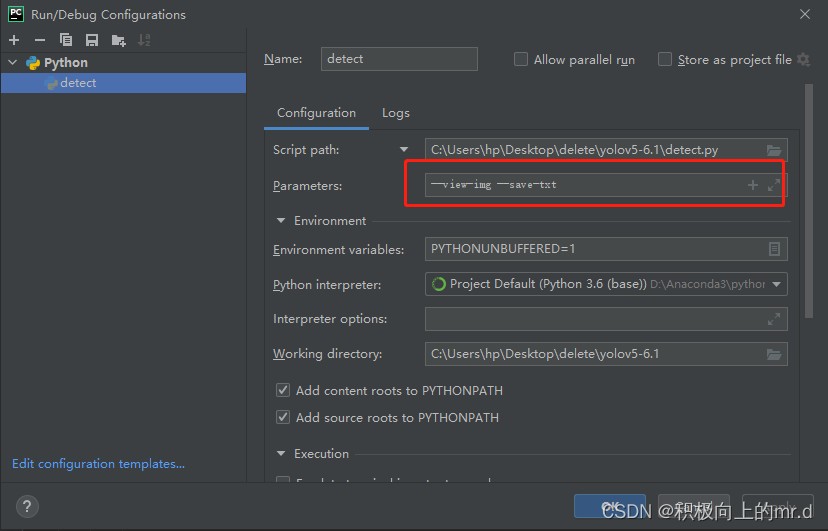
但实时显示画面太大,我们对显示部分做了修改,这部分也可以不要,具体是把代码
if view_img: cv2.imshow(str(p), im0) cv2.waitKey(1) # 1 millisecond 替换成
if view_img: cv2.namedWindow("Webcam", cv2.WINDOW_NORMAL) cv2.resizeWindow("Webcam", 1280, 720) cv2.moveWindow("Webcam", 0, 100) cv2.imshow("Webcam", im0) cv2.waitKey(1) 4.3 主代码
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license """ Run inference on images, videos, directories, streams, etc. Usage - sources: $ python path/to/detect.py --weights yolov5s.pt --source 0 # webcam img.jpg # image vid.mp4 # video path/ # directory path/*.jpg # glob 'https://youtu.be/Zgi9g1ksQHc' # YouTube 'rtsp://example.com/media.mp4' # RTSP, RTMP, HTTP stream Usage - formats: $ python path/to/detect.py --weights yolov5s.pt # PyTorch yolov5s.torchscript # TorchScript yolov5s.onnx # ONNX Runtime or OpenCV DNN with --dnn yolov5s.xml # OpenVINO yolov5s.engine # TensorRT yolov5s.mlmodel # CoreML (MacOS-only) yolov5s_saved_model # TensorFlow SavedModel yolov5s.pb # TensorFlow GraphDef yolov5s.tflite # TensorFlow Lite yolov5s_edgetpu.tflite # TensorFlow Edge TPU """ import argparse import os import sys from pathlib import Path import cv2 import torch import torch.backends.cudnn as cudnn FILE = Path(__file__).resolve() ROOT = FILE.parents[0] # YOLOv5 root directory if str(ROOT) not in sys.path: sys.path.append(str(ROOT)) # add ROOT to PATH ROOT = Path(os.path.relpath(ROOT, Path.cwd())) # relative from models.common import DetectMultiBackend from utils.datasets import IMG_FORMATS, VID_FORMATS, LoadImages, LoadStreams from utils.general import (LOGGER, check_file, check_img_size, check_imshow, check_requirements, colorstr, increment_path, non_max_suppression, print_args, scale_coords, strip_optimizer, xyxy2xywh) from utils.plots import Annotator, colors, save_one_box from utils.torch_utils import select_device, time_sync from distance import person_distance,car_distance @torch.no_grad() def run(weights=ROOT / 'yolov5s.pt', # model.pt path(s) source=ROOT / 'data/images', # file/dir/URL/glob, 0 for webcam data=ROOT / 'data/coco128.yaml', # dataset.yaml path imgsz=(640, 640), # inference size (height, width) conf_thres=0.25, # confidence threshold iou_thres=0.45, # NMS IOU threshold max_det=1000, # maximum detections per image device='', # cuda device, i.e. 0 or 0,1,2,3 or cpu view_img=False, # show results save_txt=False, # save results to *.txt save_conf=False, # save confidences in --save-txt labels save_crop=False, # save cropped prediction boxes nosave=False, # do not save images/videos classes=None, # filter by class: --class 0, or --class 0 2 3 agnostic_nms=False, # class-agnostic NMS augment=False, # augmented inference visualize=False, # visualize features update=False, # update all models project=ROOT / 'runs/detect', # save results to project/name name='exp', # save results to project/name exist_ok=False, # existing project/name ok, do not increment line_thickness=3, # bounding box thickness (pixels) hide_labels=False, # hide labels hide_conf=False, # hide confidences half=False, # use FP16 half-precision inference dnn=False, # use OpenCV DNN for ONNX inference ): source = str(source) save_img = not nosave and not source.endswith('.txt') # save inference images is_file = Path(source).suffix[1:] in (IMG_FORMATS + VID_FORMATS) is_url = source.lower().startswith(('rtsp://', 'rtmp://', 'http://', 'https://')) webcam = source.isnumeric() or source.endswith('.txt') or (is_url and not is_file) if is_url and is_file: source = check_file(source) # download # Directories save_dir = increment_path(Path(project) / name, exist_ok=exist_ok) # increment run (save_dir / 'labels' if save_txt else save_dir).mkdir(parents=True, exist_ok=True) # make dir # Load model device = select_device(device) model = DetectMultiBackend(weights, device=device, dnn=dnn, data=data) stride, names, pt, jit, onnx, engine = model.stride, model.names, model.pt, model.jit, model.onnx, model.engine imgsz = check_img_size(imgsz, s=stride) # check image size # Half half &= (pt or jit or onnx or engine) and device.type != 'cpu' # FP16 supported on limited backends with CUDA if pt or jit: model.model.half() if half else model.model.float() # Dataloader if webcam: view_img = check_imshow() cudnn.benchmark = True # set True to speed up constant image size inference dataset = LoadStreams(source, img_size=imgsz, stride=stride, auto=pt) bs = len(dataset) # batch_size else: dataset = LoadImages(source, img_size=imgsz, stride=stride, auto=pt) bs = 1 # batch_size vid_path, vid_writer = [None] * bs, [None] * bs # Run inference model.warmup(imgsz=(1 if pt else bs, 3, *imgsz), half=half) # warmup dt, seen = [0.0, 0.0, 0.0], 0 for path, im, im0s, vid_cap, s in dataset: t1 = time_sync() im = torch.from_numpy(im).to(device) im = im.half() if half else im.float() # uint8 to fp16/32 im /= 255 # 0 - 255 to 0.0 - 1.0 if len(im.shape) == 3: im = im[None] # expand for batch dim t2 = time_sync() dt[0] += t2 - t1 # Inference visualize = increment_path(save_dir / Path(path).stem, mkdir=True) if visualize else False pred = model(im, augment=augment, visualize=visualize) t3 = time_sync() dt[1] += t3 - t2 # NMS pred = non_max_suppression(pred, conf_thres, iou_thres, classes, agnostic_nms, max_det=max_det) dt[2] += time_sync() - t3 # Second-stage classifier (optional) # pred = utils.general.apply_classifier(pred, classifier_model, im, im0s) # Process predictions for i, det in enumerate(pred): # per image seen += 1 if webcam: # batch_size >= 1 p, im0, frame = path[i], im0s[i].copy(), dataset.count s += f'{i}: ' else: p, im0, frame = path, im0s.copy(), getattr(dataset, 'frame', 0) p = Path(p) # to Path save_path = str(save_dir / p.name) # im.jpg txt_path = str(save_dir / 'labels' / p.stem) + ('' if dataset.mode == 'image' else f'_{frame}') # im.txt s += '%gx%g ' % im.shape[2:] # print string gn = torch.tensor(im0.shape)[[1, 0, 1, 0]] # normalization gain whwh imc = im0.copy() if save_crop else im0 # for save_crop annotator = Annotator(im0, line_width=line_thickness, example=str(names)) if len(det): # Rescale boxes from img_size to im0 size det[:, :4] = scale_coords(im.shape[2:], det[:, :4], im0.shape).round() # Print results for c in det[:, -1].unique(): n = (det[:, -1] == c).sum() # detections per class s += f"{n} {names[int(c)]}{'s' * (n > 1)}, " # add to string # Write results for *xyxy, conf, cls in reversed(det): if save_txt: # Write to file xywh = (xyxy2xywh(torch.tensor(xyxy).view(1, 4)) / gn).view(-1).tolist() # normalized xywh line = (cls, *xywh, conf) if save_conf else (cls, *xywh) # label format with open(txt_path + '.txt', 'a') as f: f.write(('%g ' * len(line)).rstrip() % line + '\n') if save_img or save_crop or view_img: # Add bbox to image x1 = int(xyxy[0]) y1 = int(xyxy[1]) x2 = int(xyxy[2]) y2 = int(xyxy[3]) h = y2-y1 if names[int(cls)] == "person": c = int(cls) # integer class 整数类 1111111111 label = None if hide_labels else ( names[c] if hide_conf else f'{names[c]} {conf:.2f}') # 111 dis_m = person_distance(h) label += f' {dis_m}m' txt = '{0}'.format(label) # annotator.box_label(xyxy, txt, color=(255, 0, 255)) annotator.box_label(xyxy, txt, color=colors(c, True)) if names[int(cls)] == "car": c = int(cls) # integer class 整数类 1111111111 label = None if hide_labels else ( names[c] if hide_conf else f'{names[c]} {conf:.2f}') # 111 dis_m = car_distance(h) label += f' {dis_m}m' txt = '{0}'.format(label) # annotator.box_label(xyxy, txt, color=(255, 0, 255)) annotator.box_label(xyxy, txt, color=colors(c, True)) if save_crop: save_one_box(xyxy, imc, file=save_dir / 'crops' / names[c] / f'{p.stem}.jpg', BGR=True) # Stream results im0 = annotator.result() '''if view_img: cv2.imshow(str(p), im0) cv2.waitKey(1) # 1 millisecond''' if view_img: cv2.namedWindow("Webcam", cv2.WINDOW_NORMAL) cv2.resizeWindow("Webcam", 1280, 720) cv2.moveWindow("Webcam", 0, 100) cv2.imshow("Webcam", im0) cv2.waitKey(1) # Save results (image with detections) if save_img: if dataset.mode == 'image': cv2.imwrite(save_path, im0) else: # 'video' or 'stream' if vid_path[i] != save_path: # new video vid_path[i] = save_path if isinstance(vid_writer[i], cv2.VideoWriter): vid_writer[i].release() # release previous video writer if vid_cap: # video fps = vid_cap.get(cv2.CAP_PROP_FPS) w = int(vid_cap.get(cv2.CAP_PROP_FRAME_WIDTH)) h = int(vid_cap.get(cv2.CAP_PROP_FRAME_HEIGHT)) else: # stream fps, w, h = 30, im0.shape[1], im0.shape[0] save_path = str(Path(save_path).with_suffix('.mp4')) # force *.mp4 suffix on results videos vid_writer[i] = cv2.VideoWriter(save_path, cv2.VideoWriter_fourcc(*'mp4v'), fps, (w, h)) vid_writer[i].write(im0) # Print time (inference-only) LOGGER.info(f'{s}Done. ({t3 - t2:.3f}s)') # Print results t = tuple(x / seen * 1E3 for x in dt) # speeds per image LOGGER.info(f'Speed: %.1fms pre-process, %.1fms inference, %.1fms NMS per image at shape {(1, 3, *imgsz)}' % t) if save_txt or save_img: s = f"\n{len(list(save_dir.glob('labels/*.txt')))} labels saved to {save_dir / 'labels'}" if save_txt else '' LOGGER.info(f"Results saved to {colorstr('bold', save_dir)}{s}") if update: strip_optimizer(weights) # update model (to fix SourceChangeWarning) def parse_opt(): parser = argparse.ArgumentParser() parser.add_argument('--weights', nargs='+', type=str, default=ROOT / 'yolov5s.pt', help='model path(s)') parser.add_argument('--source', type=str, default=ROOT / 'data/images/1.mp4', help='file/dir/URL/glob, 0 for webcam') parser.add_argument('--data', type=str, default=ROOT / 'data/coco128.yaml', help='(optional) dataset.yaml path') parser.add_argument('--imgsz', '--img', '--img-size', nargs='+', type=int, default=[640], help='inference size h,w') parser.add_argument('--conf-thres', type=float, default=0.25, help='confidence threshold') parser.add_argument('--iou-thres', type=float, default=0.45, help='NMS IoU threshold') parser.add_argument('--max-det', type=int, default=1000, help='maximum detections per image') parser.add_argument('--device', default='', help='cuda device, i.e. 0 or 0,1,2,3 or cpu') parser.add_argument('--view-img', action='store_true', help='show results') parser.add_argument('--save-txt', action='store_true', help='save results to *.txt') parser.add_argument('--save-conf', action='store_true', help='save confidences in --save-txt labels') parser.add_argument('--save-crop', action='store_true', help='save cropped prediction boxes') parser.add_argument('--nosave', action='store_true', help='do not save images/videos') parser.add_argument('--classes', nargs='+', type=int, help='filter by class: --classes 0, or --classes 0 2 3') parser.add_argument('--agnostic-nms', action='store_true', help='class-agnostic NMS') parser.add_argument('--augment', action='store_true', help='augmented inference') parser.add_argument('--visualize', action='store_true', help='visualize features') parser.add_argument('--update', action='store_true', help='update all models') parser.add_argument('--project', default=ROOT / 'runs/detect', help='save results to project/name') parser.add_argument('--name', default='exp', help='save results to project/name') parser.add_argument('--exist-ok', action='store_true', help='existing project/name ok, do not increment') parser.add_argument('--line-thickness', default=3, type=int, help='bounding box thickness (pixels)') parser.add_argument('--hide-labels', default=False, action='store_true', help='hide labels') parser.add_argument('--hide-conf', default=False, action='store_true', help='hide confidences') parser.add_argument('--half', action='store_true', help='use FP16 half-precision inference') parser.add_argument('--dnn', action='store_true', help='use OpenCV DNN for ONNX inference') opt = parser.parse_args() opt.imgsz *= 2 if len(opt.imgsz) == 1 else 1 # expand print_args(FILE.stem, opt) return opt def main(opt): check_requirements(exclude=('tensorboard', 'thop')) run(**vars(opt)) if __name__ == "__main__": opt = parse_opt() main(opt) 5. 实验效果
实验效果如下
更多有关单目(尺寸测量,跟踪、碰撞检测等)的文章请见:https://blog.csdn.net/qq_45077760/category_12312107.html
