
阅读量:0
浅聊 Three.js 屏幕空间反射SSR(2)-SSRShader
前置基础
渲染管线中的相机和屏幕示意图
-Z (相机朝向的方向) | | | +--------------+ <- 屏幕/投影平面 | | | | | | | | (f) | <- 焦距 | | | | | | | +--------------+ | | | | | O <- 相机原点 (也称为视点) | | | | +---------------------- X (水平轴) 一、计算 viewPosition
根据深度图计算屏幕空间上的 视图位置。
float clipW = cameraProjectionMatrix[2][3] * viewZ+cameraProjectionMatrix[3][3]; vec3 viewPosition = getViewPosition( vUv, depth, clipW ); 二、计算反射位置 d1viewPosition
vec3 viewNormal=getViewNormal( vUv ); // 入射光线方向 vec3 viewIncidentDir=normalize(viewPosition); // 反射光线方向 vec3 viewReflectDir=reflect(viewIncidentDir, viewNormal); // 反射光线最大长度 float maxReflectRayLen=maxDistance/dot(-viewIncidentDir, viewNormal); // 反射位置 vec3 d1viewPosition = viewPosition + viewReflectDir * maxReflectRayLen; 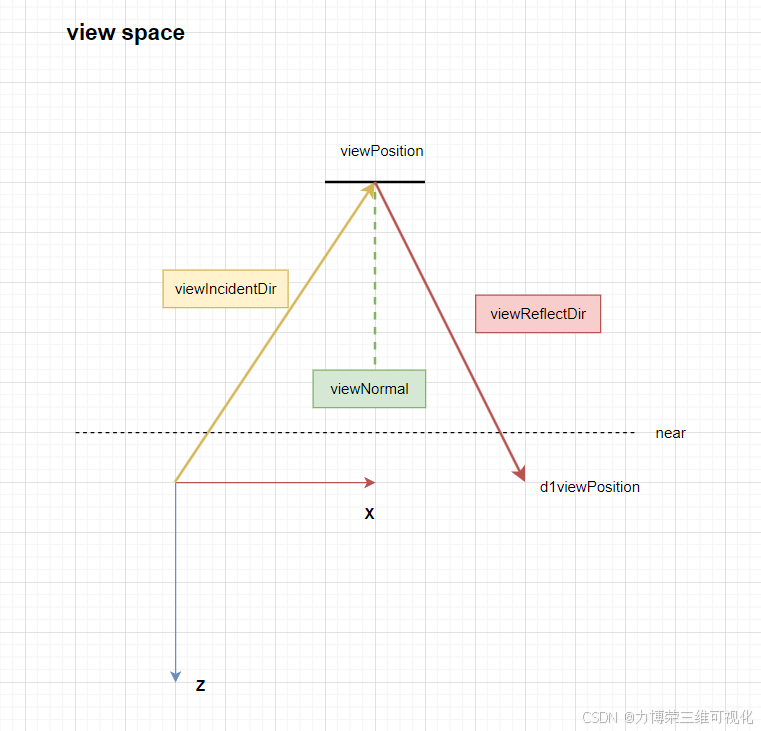
处理反射位置在近平面(即 -cameraNear)之的情况
目标:
确保反射光线的目标位置 (d1viewPosition) 不在近平面之前。如果在近平面之前,则将其调整到近平面上。
if(d1viewPosition.z > -cameraNear){ //https://tutorial.math.lamar.edu/Classes/CalcIII/EqnsOfLines.aspx float t= (-cameraNear - viewPosition.z) / viewReflectDir.z; d1viewPosition = viewPosition + viewReflectDir * t; } ^ -z | | | | * 视点(viewPosition) | \ | \ |------------ (近平面,z = -cameraNear) | \ | \ | * | \ | \ | * d1viewPosition (初始位置) | -------------------------------------> x 解释:
反射光线的参数方程:
P ( t ) = v i e w P o s i t i o n + t ∗ v i e w R e f l e c t D i r P(t) = viewPosition + t * viewReflectDir P(t)=viewPosition+t∗viewReflectDir
我们需要找到 t t t 使得:
P ( t ) . z = − c a m e r a N e a r P(t).z = -cameraNear P(t).z=−cameraNear
因此,我们需要解方程:
v i e w P o s i t i o n . z + t ∗ v i e w R e f l e c t D i r . z = − c a m e r a N e a r viewPosition.z + t * viewReflectDir.z = -cameraNear viewPosition.z+t∗viewReflectDir.z=−cameraNear
解这个方程,得到:
t = − c a m e r a N e a r − v i e w P o s i t i o n . z v i e w R e f l e c t D i r . z t = \frac{-cameraNear - viewPosition.z}{ viewReflectDir.z} t=viewReflectDir.z−cameraNear−viewPosition.z
最后, 调整反射后目标位置:
d 1 v i e w P o s i t i o n = v i e w P o s i t i o n + v i e w R e f l e c t D i r ∗ t ; d1viewPosition = viewPosition + viewReflectDir * t; d1viewPosition=viewPosition+viewReflectDir∗t;
三、计算反射位置在屏幕空间下的位置
// 屏幕分辨率 uniform vec2 resolution; // 视图空间转屏幕空间 vec2 viewPositionToXY(vec3 viewPosition){ vec2 xy; vec4 clip = cameraProjectionMatrix * vec4(viewPosition,1); //clip xy = clip.xy; float clipW = clip.w; //NDC xy /= clipW; //uv xy = (xy + 1.) / 2.; //screen xy *=resolution; return xy; } vec2 d1 = viewPositionToXY(d1viewPosition); 四、屏幕空间光线步进(Ray Marching)
参考: DDA 画直线算法
// 片段着色器中的当前像素坐标 vec2 d0 = gl_FragCoord.xy; vec2 d1 = viewPositionToXY(d1viewPosition); // x 和 y 方向上的距离 float xLen = d1.x-d0.x; float yLen = d1.y-d0.y; // 两个点之间的欧几里得距离 float totalLen = length(d1-d0); // 在 x 和 y 方向上步数的最大值,用于决定采样的步数 float totalStep = max(abs(xLen), abs(yLen)); // 每一步在 x 和 y 方向上的增量 float xSpan = xLen / totalStep; float ySpan = yLen / totalStep; for(float i = 0.; i<float(MAX_STEP); i++) { if(i >= totalStep) break; vec2 xy = vec2(d0.x + i * xSpan, d0.y + i * ySpan); if(xy.x < 0. || xy.x > resolution.x || xy.y < 0. || xy.y > resolution.y) break; // 比例进度, 0~1 float s = length(xy - d0) / totalLen; vec2 uv = xy / resolution; float d = getDepth(uv); // 当前像素的视图空间深度值 float vZ = getViewZ(d); if(-vZ >= cameraFar) continue; float cW = cameraProjectionMatrix[2][3] * vZ+cameraProjectionMatrix[3][3]; vec3 vP = getViewPosition( uv, d, cW ); // https://comp.nus.edu.sg/~lowkl/publications/lowk_persp_interp_techrep.pdf float recipVPZ = 1. / viewPosition.z; // 基于插值得到的透视矫正后的深度值 float viewReflectRayZ = 1. / (recipVPZ + s * (1. / d1viewPosition.z - recipVPZ)); if(viewReflectRayZ <= vZ){ // 只处理无限厚度的情况 vec3 vN = getViewNormal(uv); if(dot(viewReflectDir,vN) >= 0.) continue; float distance = pointPlaneDistance(vP, viewPosition, viewNormal); if(distance > maxDistance) break; vec4 reflectColor = texture2D(tDiffuse, uv); gl_FragColor = reflectColor; } } 只处理 viewReflectRayZ <= vZ的情况
^ -z | | | * viewPosition (反射的起始位置) | \ | \ | \ | \ | \ | * viewReflectRayZ (矫正后的深度值) | \ | \ | * vZ (当前像素深度值) | \ | \ | \ | \ | -------------------------------------> x 在透视投影下,深度值绝对值越小,表示距离相机越近。在进行光线行进时,我们希望光线从起点出发,经过所有可能的深度值,直到目标位置
viewReflectRayZ 是矫正后的深度值,它应该始终小于或等于 vZ,以确保光线距离起点从近到远进行插值和计算。
如果 viewReflectRayZ 大于 vZ, 这种情况可能导致光线跳过当前像素,直接到达更远的像素,产生穿透问题
通过确保 viewReflectRayZ <= vZ,可以保证光线在行进过程中深度值是连续变化的,从而提高插值的精度,避免因不连续的深度值变化而产生的伪影
只处理钝角的情况
点积大于或等于零,表示这两个单位向量的夹角小于或等于 90 度。
点到平面距离
float pointPlaneDistance(vec3 point,vec3 planePoint,vec3 planeNormal){ // https://mathworld.wolfram.com/Point-PlaneDistance.html https://en.wikipedia.org/wiki/Plane_(geometry) http://paulbourke.net/geometry/pointlineplane/ float a = planeNormal.x; float b = planeNormal.y; float c = planeNormal.z; float x0 = point.x; float y0 = point.y; float z0 = point.z; float x = planePoint.x; float y = planePoint.y; float z = planePoint.z; float d = -(a * x + b * y + c * z); float distance = (a * x0 + b * y0 + c * z0 + d)/sqrt(a * a + b * b + c * c); return distance; } 