
阅读量:4
前提
我们都知道内存分布中的堆区(Heap section),new出来的空间都在堆区上。和堆区有一个名字很相近的数据结构——堆(Heap),虽然名称相近,但两者是完全不同的东西。
因为十大排序算法中有一个堆排序,所以从头开始了解下堆这个数据结构, 终学习下堆排序算法。
堆——数据结构
堆是什么
堆的本质是完全二叉树,只不过要在完全二叉树上加一些限制条件。根据加的限制条件的不同,堆又被分为大顶堆和小顶椎。
大顶堆
大顶堆:任意节点的值>=其子节点的值。
如下所示: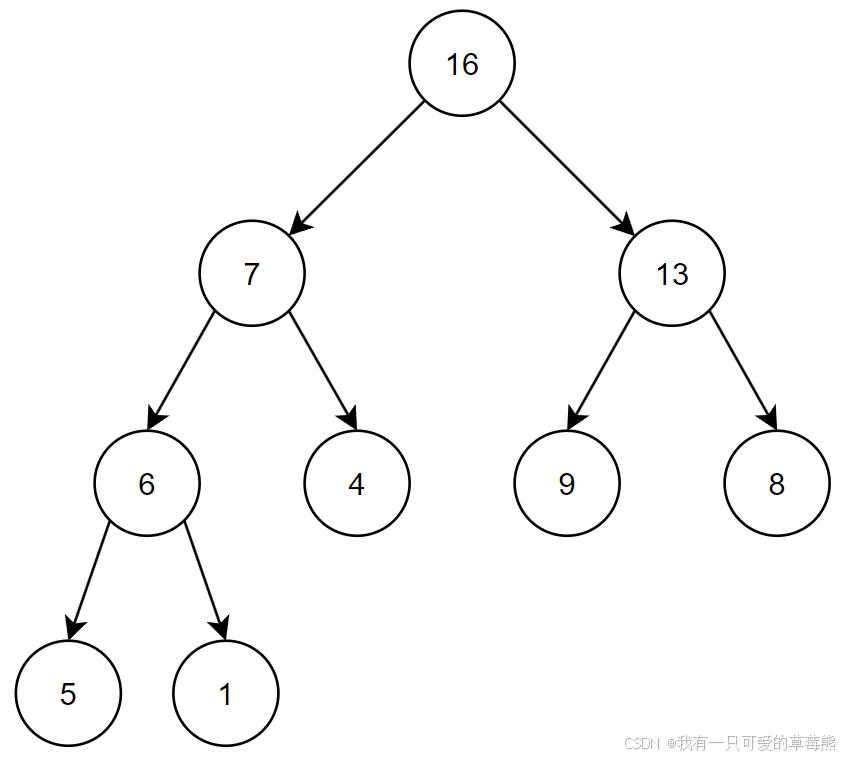
小顶堆
小顶堆:任意节点的值<=其子节点的值。
如下所示: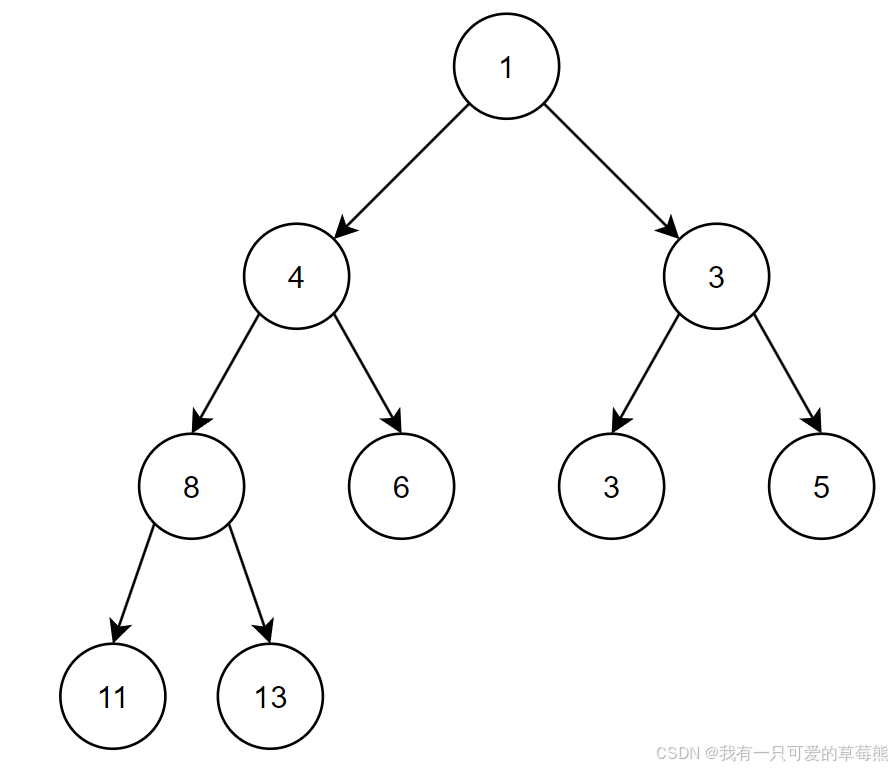
堆的实现
接下来我们实现一个大顶堆。
堆的存储与表示
堆的本质是完全二叉树,树形结构可以使用数组和链表进行存储。但是对于完全二叉树来说,使用数组存储更为合适。为什么呢?接下来做个简单分析。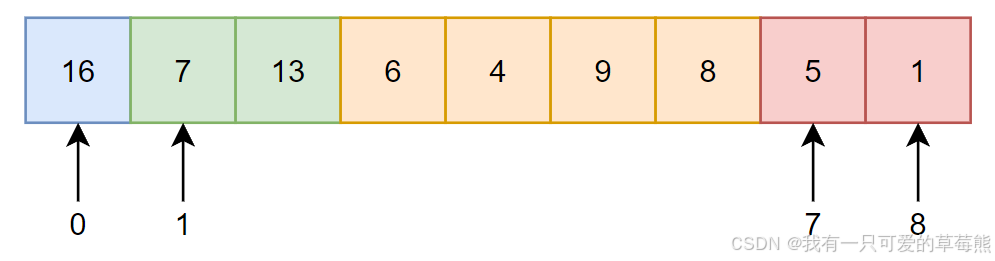
如果使用数组进行存储,头节点放在数组中下标为0的位置,剩于的所有节点顺序在数组中存放。
这样当我们访问下标为i的结点时:
- 可以使用2i+i访问它的左子节点
- 使用2i+2访问它的右子节点
- 使用 (i-1)/2 访问它的节点
- 同时,如果计算出的下标大于数组的容量,代表没有此节点
访问堆顶元素
我们知道对于堆来说,堆顶元素存储在数组的0号下标,所以直接返回即可。
元素入堆
要给堆添加元素时,添加的元素可能会破坏堆的成立条件 (对于大顶堆,任意节点的值>=其子节点的值) 。因此添加元素到堆底后,我们要调整堆中节点的位置。
那么一个简单的思路是:比较插入节点与其父节点的值,如果插入节点更大,则将它们交换。然后继续执行此操作,从底至顶修复堆中的各个节点,直至越过根节点或遇到无须交换的节点时结束。
这里最坏的清况是:插入的节点是新的根节点。所以如果整个堆有 n n n 个节点,二叉树高 O ( l o g n ) O(logn) O(logn),此时的时间复杂度为 O ( l o g n ) O(logn) O(logn)。最好的清况是:插入的节点不需要移动。此时的时间复杂度为 O ( 1 ) O(1) O(1)。
堆顶元素出堆
堆顶元素出堆后,新的堆顶元素是谁?而且由于堆中少了一个元素,所以堆中剩于元素在数组中的索引会发生变化,所以如何确定新的元素索引呢?
这里的算法为:
- 交换堆顶元素与堆底元素(交换根节点与最右叶节点)。
- 交换完成后,将堆底从列表中删除(注意,由于已经交换,因此实际上删除的是原来的堆顶元素)。
- 从根节点开始,从顶至底执行堆化。
实现代码
#include <iostream> #include <vector> template <typename T> class Heap { public: Heap() = default; T peek() { /* Get the top element of the heap */ if (data.empty()) throw std::runtime_error("Heap is empty"); return data[0]; } void push(T val) { /* Insert an element into the heap */ data.push_back(val); siftUp(data.size() - 1); } void pop() { /* Remove the top element of the heap */ if (data.empty()) { throw std::runtime_error("Heap is empty"); } std::swap(data[0], data[data.size() - 1]); data.pop_back(); siftDown(0); } int size() { return data.size(); } private: std::vector<T> data; inline int left(int i) { return 2 * i + 1; } // Get the left child of i inline int right(int i) { return 2 * i + 2; } // Get the right child of i inline int parent(int i) { return (i - 1) / 2; } // Get the parent of i void siftUp(int i) { // Move the element up the heap while (i > 0 && data[parent(i)] < data[i]) { /* Compare with the parent */ std::swap(data[parent(i)], data[i]); i = parent(i); } } void siftDown(int i) { // Move the element down the heap while (true) { int l = left(i), r = right(i), ma = i; if (l < data.size() && data[l] > data[ma]) { ma = l; } if (r < data.size() && data[r] > data[ma]) { ma = r; } std::swap(data[i], data[ma]); if (ma == i) { break; } i = ma; } } }; int main() { Heap<int> heap; heap.push(1); heap.push(2); heap.push(3); heap.push(4); heap.push(5); std::cout << "Heap size: " << heap.size() << std::endl; std::cout << "Heap top: " << heap.peek() << std::endl; heap.pop(); std::cout << "Heap size: " << heap.size() << std::endl; std::cout << "Heap top: " << heap.peek() << std::endl; } 优先队列
堆通常可以用来实现优先队列,优先队列(Priority Queue)是一种抽象数据类型,类似于普通的队列或堆栈数据结构,但每个元素都有一个优先级。优先级高的元素会优先出队(被处理),而不是按照元素入队的顺序来处理。
堆排序
如果你明白上面的内容后,那么堆排序就比较简单了。
流程如下:
- 将给定的无序数组建成一个堆(假定是大顶堆)
- 将堆顶元素弹出
- 重新对堆中剩于的元素堆化
- 重复2和3,直到堆中无元素
这里存在一个问题:如何将给定的无序数组建成一个堆?
一个很笨的方法是:我们将无序数组中的元素一个一个取出来,然后push到堆中。伪代码如下:
std::vector<int> vec{1, 3, 5, 2, 0, 4}; Heap<int> heap; for (int i = 0; i < vec.size(); i++) { heap.push(vec[i]); } 如果有 n n n个节点的话,这里的时间复杂度为 O ( n l o g n ) O(nlogn) O(nlogn)。
参考链接2,有一个时间复杂度为 O ( n ) O(n) O(n)的建堆方法。
堆排序代码
简单思路版本:
/* 堆的长度为 n ,从节点 i 开始,从顶至底堆化 */ void siftDown(std::vector<int> &nums, int n, int i) { while (true) { // 判断节点 i, l, r 中值最大的节点,记为 ma int l = 2 * i + 1; int r = 2 * i + 2; int ma = i; if (l < n && nums[l] > nums[ma]) ma = l; if (r < n && nums[r] > nums[ma]) ma = r; // 若节点 i 最大或索引 l, r 越界,则无须继续堆化,跳出 if (ma == i) { break; } // 交换两节点 std::swap(nums[i], nums[ma]); // 循环向下堆化 i = ma; } } /* 堆排序 */ std::vector<int> heapSort(std::vector<int> &nums) { // 建堆操作:堆化除叶节点以外的其他所有节点 for (int i = nums.size() / 2 - 1; i >= 0; --i) { siftDown(nums, nums.size(), i); } std::vector<int> res; /* 用来收集堆顶元素 */ // 从堆中提取最大元素 for (int i = nums.size() - 1; i >= 0; --i) { // 交换根节点与最右叶节点(交换首元素与尾元素) std::swap(nums[0], nums[nums.size() - 1]); res.push_back(nums.back()); nums.pop_back(); // 将堆顶元素弹出 siftDown(nums, nums.size(), 0); // 重新对堆中剩于的元素堆化 } return res; } int main() { std::vector<int> vec{1, 3, 5, 2, 0, 4}; std::vector<int> res = heapSort(vec); for (int i = 0; i < res.size(); i++) { std::cout << res[i] << " "; } } 上面的这种写法要多定义一个空间复杂度为 O ( n ) O(n) O(n)的结果数组,用来保存结果,这会造成额外的空间浪费。
那么有没有方法可以建堆后,直接对堆进行排序。
答案是有的,每次将堆的顶点和堆底交换后,顶点元素本是要弹出的(目的是对剩于的堆中的元素重新进行排序)。我们可以弹出操作变为动态减少堆的大小。代码如下:
/* 堆的长度为 n ,从节点 i 开始,从顶至底堆化 */ void siftDown(std::vector<int> &nums, int n, int i) { while (true) { // 判断节点 i, l, r 中值最大的节点,记为 ma int l = 2 * i + 1; int r = 2 * i + 2; int ma = i; if (l < n && nums[l] > nums[ma]) ma = l; if (r < n && nums[r] > nums[ma]) ma = r; // 若节点 i 最大或索引 l, r 越界,则无须继续堆化,跳出 if (ma == i) { break; } // 交换两节点 std::swap(nums[i], nums[ma]); // 循环向下堆化 i = ma; } } /* 堆排序 */ void heapSort(std::vector<int> &nums) { // 建堆操作:堆化除叶节点以外的其他所有节点 for (int i = nums.size() / 2 - 1; i >= 0; --i) { siftDown(nums, nums.size(), i); } // 从堆中提取最大元素,循环 n-1 轮, because the last element is the smallest for (int i = nums.size() - 1; i > 0; --i) { // 交换根节点与最右叶节点(交换首元素与尾元素) std::swap(nums[0], nums[i]); siftDown(nums, i, 0); // every loop, the heap size is reduced by 1 } } int main() { std::vector<int> vec{1, 3, 5, 2, 0, 4}; heapSort(vec); for (int i = 0; i < vec.size(); i++) { std::cout << vec[i] << " "; } } 所以堆排序的时间复杂度应为 O ( n l o g n ) O(nlogn) O(nlogn),因为for循环n-1次,每一次堆化的复杂度为 O ( l o g n ) O(logn) O(logn)。
参考链接
- https://www.hello-algo.com/chapter_heap/heap/#3
- https://www.hello-algo.com/chapter_heap/build_heap/
