
阅读量:0
mediasoup源码分析--channel创建及信令交互
概述
在golang实现mediasoup的tcp服务及channel通道一文中,已经介绍过信令服务中tcp和channel的创建,本文主要讲解c++中mediasoup的channel创建,以及信令服务和mediasoup服务如何交互
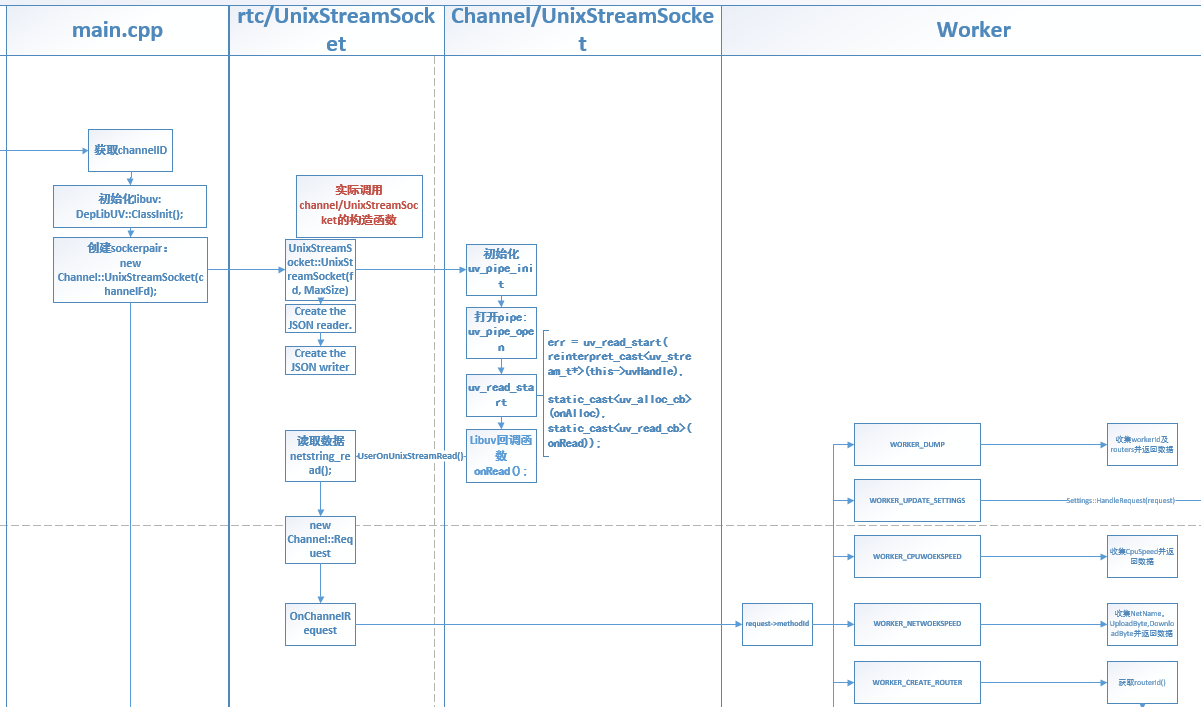
跨职能图
业务流程图
数据发送有两种方式:
应用层发送的request最后被封装在Requst对象中,其中包含着"id",因为Request对象中包含着Channel::UnixStreamSocket对象,所以可以直接调用Request::Accept()将处理后的结果告诉应用层进程。
Worker进程也可以主动给应用层进程发送消息,通过Notifier::Emit()即可以给应用进程发送消息,Notifier类中有Channel::UnixStreamSocket,所以直接调用Channel::UnixStreamSocket::Send()就可以发送消息。Notifier类内部的数据成员和函数成员都是静态的,所以在任意位置可以直接通过Channel::Notifier::Emit()函数发送消息。
代码剖析
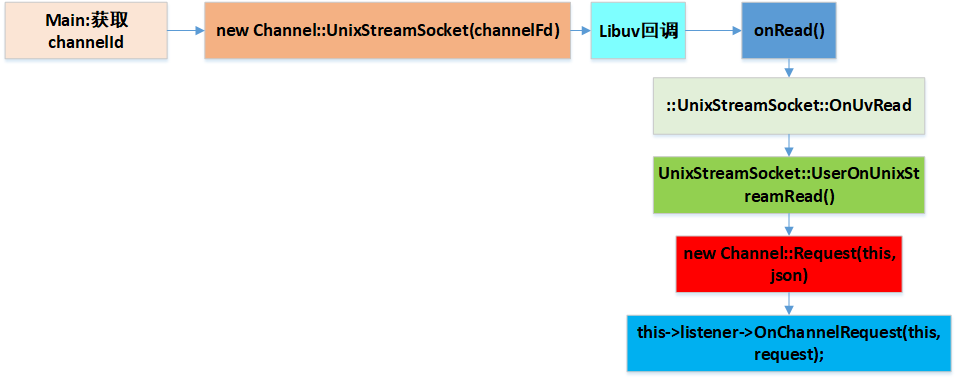
1.channel创建
int main(int argc, char* argv[]) { // Ensure we are called by our Node library. if (argc == 1) { std::cerr << "ERROR: you don't seem to be my real father" << std::endl; std::_Exit(EXIT_FAILURE); } std::string id = std::string(argv[1]); std::string ip = std::string(argv[2]); int port = atoi(argv[3]); int iperfPort = atoi(argv[4]); // Initialize libuv stuff (we need it for the Channel). DepLibUV::ClassInit(); //..........省略部分代码.............. // Set the Channel socket (this will be handled and deleted by the Worker). printf("new Channel to %s:%d\n",ip.c_str(),port); auto* channel = new Channel::UnixStreamSocket(ip,port); //..........省略部分代码.............. try { // Run the Worker. Worker worker(id,channel); // Worker ended. destroy(); exitSuccess(); } catch (const MediaSoupError& error) { MS_ERROR_STD("failure exit: %s", error.what()); destroy(); exitWithError(); } } UnixStreamSocket构造函数
UnixStreamSocket::UnixStreamSocket(const std::string& ip,int port) : ::UnixStreamSocket::UnixStreamSocket(ip,port, MaxSize) { MS_TRACE_STD(); // Create the JSON reader. { Json::CharReaderBuilder builder; Json::Value settings = Json::nullValue; Json::Value invalidSettings; builder.strictMode(&settings); MS_ASSERT(builder.validate(&invalidSettings), "invalid Json::CharReaderBuilder"); this->jsonReader = builder.newCharReader(); } // Create the JSON writer. { Json::StreamWriterBuilder builder; Json::Value invalidSettings; builder["commentStyle"] = "None"; builder["indentation"] = ""; builder["enableYAMLCompatibility"] = false; builder["dropNullPlaceholders"] = false; MS_ASSERT(builder.validate(&invalidSettings), "invalid Json::StreamWriterBuilder"); this->jsonWriter = builder.newStreamWriter(); } } 跳转到handles\UnixStreamSocket.cpp下
UnixStreamSocket::UnixStreamSocket( const std::string& ip,int port,size_t bufferSize) : bufferSize(bufferSize) { printf("::UnixStreamSocket::UnixStreamSocket\n"); MS_TRACE_STD(); int err; this->uvHandle = new uv_tcp_t; this->uvHandle->data = (void*)this; err = uv_tcp_init(DepLibUV::GetLoop(), this->uvHandle); if (err != 0) { delete this->uvHandle; this->uvHandle = nullptr; printf("uv_tcp_init() failed: %s\n", uv_strerror(err)); MS_THROW_ERROR_STD("uv_tcp_init() failed: %s", uv_strerror(err)); } struct sockaddr_in dest; uv_ip4_addr(ip.c_str(), port, &dest); this->connect = new uv_connect_t; printf("will connect to %s:%d\n",ip.c_str(),port); err = uv_tcp_connect(this->connect, this->uvHandle, (const struct sockaddr*)&dest, onConnect); if (err != 0) { delete this->uvHandle; this->uvHandle = nullptr; printf("uv_tcp_connect() failed: %s\n", uv_strerror(err)); MS_THROW_ERROR_STD("uv_tcp_connect() failed: %s", uv_strerror(err)); } // Start reading. err = uv_read_start( reinterpret_cast<uv_stream_t*>(this->uvHandle), static_cast<uv_alloc_cb>(onAlloc), static_cast<uv_read_cb>(onRead)); if (err != 0) { uv_close(reinterpret_cast<uv_handle_t*>(this->uvHandle), static_cast<uv_close_cb>(onClose)); MS_THROW_ERROR_STD("uv_read_start() failed: %s", uv_strerror(err)); } // NOTE: Don't allocate the buffer here. Instead wait for the first uv_alloc_cb(). } 代码中的uv_read_start接口中onRead回调
err = uv_read_start( reinterpret_cast<uv_stream_t*>(this->uvHandle), static_cast<uv_alloc_cb>(onAlloc), static_cast<uv_read_cb>(onRead)); 跳转到onRead中
inline static void onRead(uv_stream_t* handle, ssize_t nread, const uv_buf_t* buf) { auto* socket = static_cast<UnixStreamSocket*>(handle->data); if (socket == nullptr) return; socket->OnUvRead(nread, buf); } OnUvRead中调用UserOnUnixStreamRead
void UnixStreamSocket::UserOnUnixStreamRead() { MS_TRACE_STD(); // Be ready to parse more than a single message in a single TCP chunk. while (true) { if (IsClosed()) return; size_t readLen = this->bufferDataLen - this->msgStart; char* jsonStart = nullptr; size_t jsonLen; int nsRet = netstring_read( reinterpret_cast<char*>(this->buffer + this->msgStart), readLen, &jsonStart, &jsonLen); //.............省略部分代码.............. // If here it means that jsonStart points to the beginning of a JSON string // with jsonLen bytes length, so recalculate readLen. readLen = reinterpret_cast<const uint8_t*>(jsonStart) - (this->buffer + this->msgStart) + jsonLen + 1; Json::Value json; std::string jsonParseError; if (this->jsonReader->parse( (const char*)jsonStart, (const char*)jsonStart + jsonLen, &json, &jsonParseError)) { Channel::Request* request = nullptr; try { request = new Channel::Request(this, json); } catch (const MediaSoupError& error) { MS_ERROR_STD("discarding wrong Channel request"); } if (request != nullptr) { // Notify the listener. this->listener->OnChannelRequest(this, request); // Delete the Request. delete request; } //.............省略部分代码.............. ... } } channel创建完成,至此,跳转到worker.cpp中的OnChannelRequest接口。mediasoup监听channel信令并根据request->methodId分类处理
根据request->methodId,分别执行不同的业务
request->methodId有如下分类
std::unordered_map<std::string, Request::MethodId> Request::string2MethodId = { { "worker.dump", Request::MethodId::WORKER_DUMP }, { "worker.updateSettings", Request::MethodId::WORKER_UPDATE_SETTINGS }, { "worker.createRouter", Request::MethodId::WORKER_CREATE_ROUTER }, { "router.close", Request::MethodId::ROUTER_CLOSE }, { "router.dump", Request::MethodId::ROUTER_DUMP }, { "router.createWebRtcTransport", Request::MethodId::ROUTER_CREATE_WEBRTC_TRANSPORT }, { "router.createPlainRtpTransport", Request::MethodId::ROUTER_CREATE_PLAIN_RTP_TRANSPORT }, { "router.createProducer", Request::MethodId::ROUTER_CREATE_PRODUCER }, { "router.createConsumer", Request::MethodId::ROUTER_CREATE_CONSUMER }, { "router.setAudioLevelsEvent", Request::MethodId::ROUTER_SET_AUDIO_LEVELS_EVENT }, { "transport.close", Request::MethodId::TRANSPORT_CLOSE }, { "transport.dump", Request::MethodId::TRANSPORT_DUMP }, { "transport.getStats", Request::MethodId::TRANSPORT_GET_STATS }, { "transport.setRemoteDtlsParameters", Request::MethodId::TRANSPORT_SET_REMOTE_DTLS_PARAMETERS }, { "transport.setRemoteParameters", Request::MethodId::TRANSPORT_SET_REMOTE_PARAMETERS }, { "transport.setMaxBitrate", Request::MethodId::TRANSPORT_SET_MAX_BITRATE }, { "transport.changeUfragPwd", Request::MethodId::TRANSPORT_CHANGE_UFRAG_PWD }, { "transport.startMirroring", Request::MethodId::TRANSPORT_START_MIRRORING }, { "transport.stopMirroring", Request::MethodId::TRANSPORT_STOP_MIRRORING }, { "producer.close", Request::MethodId::PRODUCER_CLOSE }, { "producer.dump", Request::MethodId::PRODUCER_DUMP }, { "producer.getStats", Request::MethodId::PRODUCER_GET_STATS }, { "producer.pause", Request::MethodId::PRODUCER_PAUSE }, { "producer.resume" , Request::MethodId::PRODUCER_RESUME }, { "producer.setPreferredProfile", Request::MethodId::PRODUCER_SET_PREFERRED_PROFILE }, { "consumer.close", Request::MethodId::CONSUMER_CLOSE }, { "consumer.dump", Request::MethodId::CONSUMER_DUMP }, { "consumer.getStats", Request::MethodId::CONSUMER_GET_STATS }, { "consumer.enable", Request::MethodId::CONSUMER_ENABLE }, { "consumer.pause", Request::MethodId::CONSUMER_PAUSE }, { "consumer.resume", Request::MethodId::CONSUMER_RESUME }, { "consumer.setPreferredProfile", Request::MethodId::CONSUMER_SET_PREFERRED_PROFILE }, { "consumer.setEncodingPreferences", Request::MethodId::CONSUMER_SET_ENCODING_PREFERENCES }, { "consumer.requestKeyFrame", Request::MethodId::CONSUMER_REQUEST_KEY_FRAME } }; 下一章节介绍mediasoup如何将信令返回值及其他通知信息推送到信令服务,敬请期待!
tips
更多关于mediasoup的文章可以进入我的专栏查看
http://t.csdnimg.cn/3UQeL
