
阅读量:2
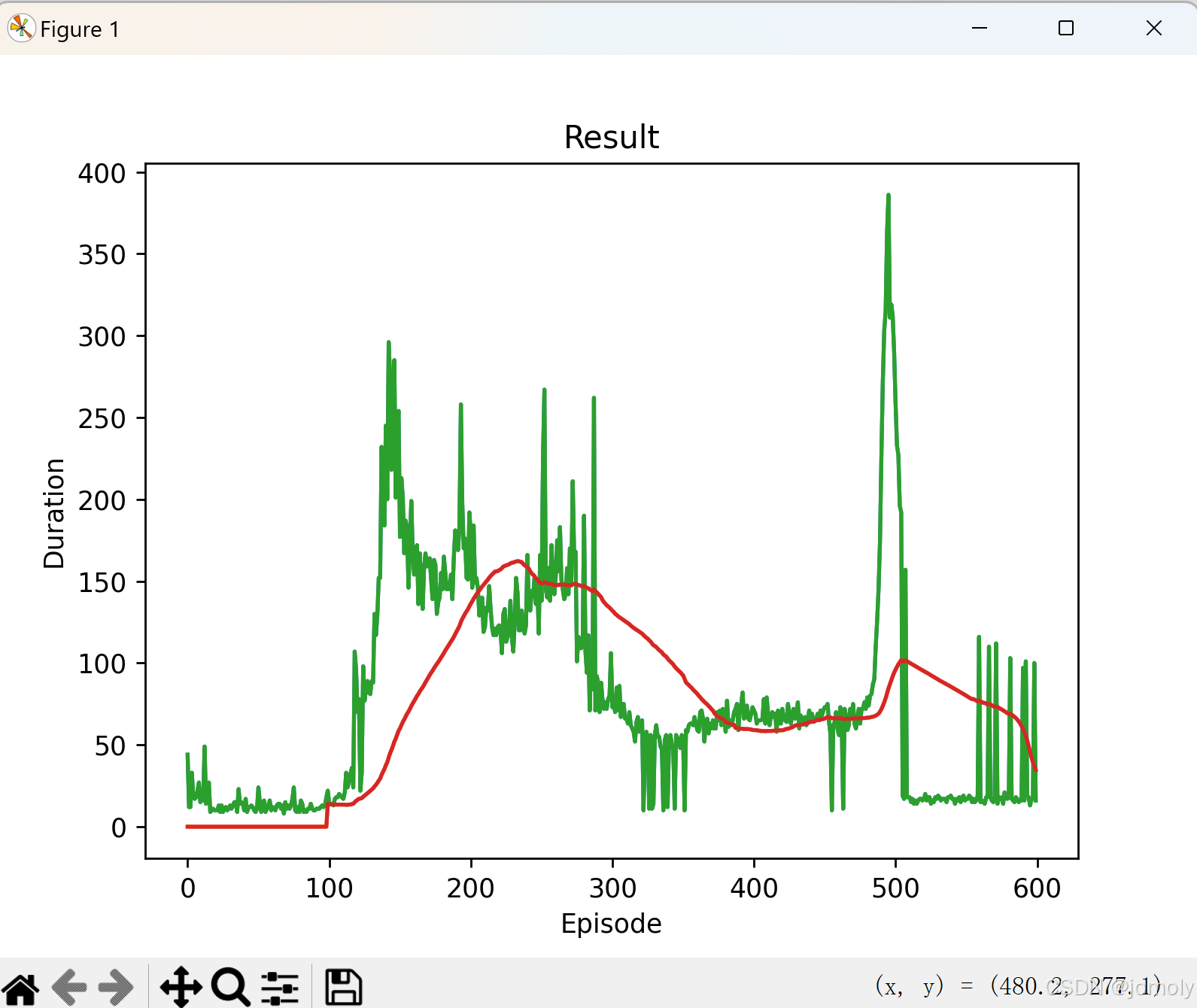
先上图,上篇文章的运行结果,可以看到,算法在迭代了200来次左右达到人生巅峰,倒立摆金枪不倒,可以扛住连续200次操作。不幸的是,然后就出现了大幅度的回撤,每况愈下,在600次时候居然和100次的时候一个水平。
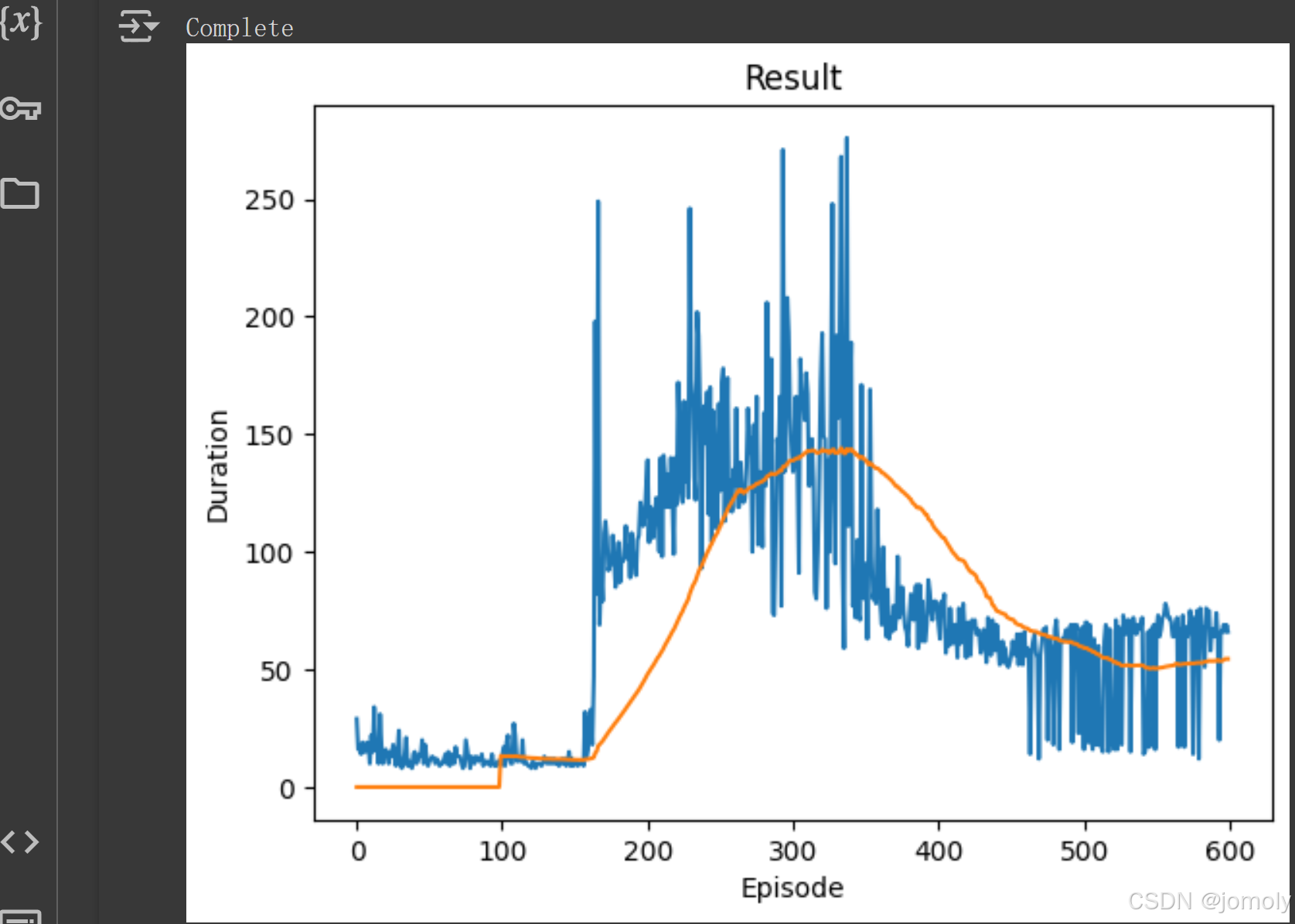
事实上,训练充满了随机性,也不乏非常漂亮的曲线,可以用来tree new bee,这也是AI领域很好水论文的体现吧。
下面两个图,分别来自,windows11本地运行 vs Colab云端运行。
呃,这个就是为啥G家主推的深度学习目前应用场景窄,被openAI狠揍的核心原因了 -
1)只能处理离散模型,数据量要求极高;
2)模型通用性差,不同的场景需要定制算法;
虽然G家多次宣称“霸权”,但事实上这个技术栈确实不适合解决通用问题。
开箱即食,以下为代码(单一python文件,windows11 + python 3.11.9 + GTX1080显卡) -
import gymnasium as gym import math import random import matplotlib import matplotlib.pyplot as plt from collections import namedtuple, deque from itertools import count import torch import torch.nn as nn import torch.optim as optim import torch.nn.functional as F env = gym.make("CartPole-v1", render_mode="human") # set up matplotlib is_ipython = 'inline' in matplotlib.get_backend() if is_ipython: from IPython import display plt.ion() # if GPU is to be used device = torch.device("cuda" if torch.cuda.is_available() else "cpu") ##device = torch.device("cuda") Transition = namedtuple('Transition', ('state', 'action', 'next_state', 'reward')) class ReplayMemory(object): def __init__(self, capacity): self.memory = deque([], maxlen=capacity) def push(self, *args): """Save a transition""" self.memory.append(Transition(*args)) def sample(self, batch_size): return random.sample(self.memory, batch_size) def __len__(self): return len(self.memory) class DQN(nn.Module): def __init__(self, n_observations, n_actions): super(DQN, self).__init__() self.layer1 = nn.Linear(n_observations, 128) self.layer2 = nn.Linear(128, 128) self.layer3 = nn.Linear(128, n_actions) # Called with either one element to determine next action, or a batch # during optimization. Returns tensor([[left0exp,right0exp]...]). def forward(self, x): x = F.relu(self.layer1(x)) x = F.relu(self.layer2(x)) return self.layer3(x) # BATCH_SIZE is the number of transitions sampled from the replay buffer # GAMMA is the discount factor as mentioned in the previous section # EPS_START is the starting value of epsilon # EPS_END is the final value of epsilon # EPS_DECAY controls the rate of exponential decay of epsilon, higher means a slower decay # TAU is the update rate of the target network # LR is the learning rate of the ``AdamW`` optimizer BATCH_SIZE = 128 GAMMA = 0.99 EPS_START = 0.9 EPS_END = 0.05 EPS_DECAY = 1000 TAU = 0.005 LR = 1e-4 # Get number of actions from gym action space n_actions = env.action_space.n # Get the number of state observations state, info = env.reset() n_observations = len(state) policy_net = DQN(n_observations, n_actions).to(device) target_net = DQN(n_observations, n_actions).to(device) target_net.load_state_dict(policy_net.state_dict()) optimizer = optim.AdamW(policy_net.parameters(), lr=LR, amsgrad=True) memory = ReplayMemory(10000) steps_done = 0 def select_action(state): global steps_done sample = random.random() eps_threshold = EPS_END + (EPS_START - EPS_END) * \ math.exp(-1. * steps_done / EPS_DECAY) steps_done += 1 if sample > eps_threshold: with torch.no_grad(): # t.max(1) will return the largest column value of each row. # second column on max result is index of where max element was # found, so we pick action with the larger expected reward. return policy_net(state).max(1)[1].view(1, 1) else: return torch.tensor([[env.action_space.sample()]], device=device, dtype=torch.long) episode_durations = [] def plot_durations(show_result=False): plt.figure(1) durations_t = torch.tensor(episode_durations, dtype=torch.float) if show_result: plt.title('Result') else: plt.clf() plt.title('Training...') plt.xlabel('Episode') plt.ylabel('Duration') plt.plot(durations_t.numpy()) # Take 100 episode averages and plot them too if len(durations_t) >= 100: means = durations_t.unfold(0, 100, 1).mean(1).view(-1) means = torch.cat((torch.zeros(99), means)) plt.plot(means.numpy()) plt.pause(0.001) # pause a bit so that plots are updated if is_ipython: if not show_result: display.display(plt.gcf()) display.clear_output(wait=True) else: display.display(plt.gcf()) def optimize_model(): if len(memory) < BATCH_SIZE: return transitions = memory.sample(BATCH_SIZE) # Transpose the batch (see https://stackoverflow.com/a/19343/3343043 for # detailed explanation). This converts batch-array of Transitions # to Transition of batch-arrays. batch = Transition(*zip(*transitions)) # Compute a mask of non-final states and concatenate the batch elements # (a final state would've been the one after which simulation ended) non_final_mask = torch.tensor(tuple(map(lambda s: s is not None, batch.next_state)), device=device, dtype=torch.bool) non_final_next_states = torch.cat([s for s in batch.next_state if s is not None]) state_batch = torch.cat(batch.state) action_batch = torch.cat(batch.action) reward_batch = torch.cat(batch.reward) # Compute Q(s_t, a) - the model computes Q(s_t), then we select the # columns of actions taken. These are the actions which would've been taken # for each batch state according to policy_net state_action_values = policy_net(state_batch).gather(1, action_batch) # Compute V(s_{t+1}) for all next states. # Expected values of actions for non_final_next_states are computed based # on the "older" target_net; selecting their best reward with max(1)[0]. # This is merged based on the mask, such that we'll have either the expected # state value or 0 in case the state was final. next_state_values = torch.zeros(BATCH_SIZE, device=device) with torch.no_grad(): next_state_values[non_final_mask] = target_net(non_final_next_states).max(1)[0] # Compute the expected Q values expected_state_action_values = (next_state_values * GAMMA) + reward_batch # Compute Huber loss criterion = nn.SmoothL1Loss() loss = criterion(state_action_values, expected_state_action_values.unsqueeze(1)) # Optimize the model optimizer.zero_grad() loss.backward() # In-place gradient clipping torch.nn.utils.clip_grad_value_(policy_net.parameters(), 100) optimizer.step() num_episodes = 600 for i_episode in range(num_episodes): # Initialize the environment and get it's state state, info = env.reset() state = torch.tensor(state, dtype=torch.float32, device=device).unsqueeze(0) for t in count(): action = select_action(state) observation, reward, terminated, truncated, _ = env.step(action.item()) reward = torch.tensor([reward], device=device) done = terminated or truncated if terminated: next_state = None else: next_state = torch.tensor(observation, dtype=torch.float32, device=device).unsqueeze(0) # Store the transition in memory memory.push(state, action, next_state, reward) # Move to the next state state = next_state # Perform one step of the optimization (on the policy network) optimize_model() # Soft update of the target network's weights # θ′ ← τ θ + (1 −τ )θ′ target_net_state_dict = target_net.state_dict() policy_net_state_dict = policy_net.state_dict() for key in policy_net_state_dict: target_net_state_dict[key] = policy_net_state_dict[key]*TAU + target_net_state_dict[key]*(1-TAU) target_net.load_state_dict(target_net_state_dict) if done: episode_durations.append(t + 1) plot_durations() break print('Complete') plot_durations(show_result=True) plt.ioff() plt.show() 迭代次数是600,如果是使用CPU而不是GPU的话,建议设置在50以内,否则你懂的... ...
前置条件是安装老黄家的Cuda,以及准备好python环境(cuda暂不支持python 3.12),安装好需要的库,需要的可以看我此前的博文。
您的进步和反馈是我最大的动力,小伙伴来个三连呗!共勉。
