
阅读量:3
目录

绝大多数嵌入式初学者都从裸机编程开始,因为它更加直观、简单。通过裸机编程,你能够直接操作硬件,代码所见即所得,调试也非常方便。相比使用操作系统,裸机编程无需掌握大量的操作系统基础知识和调度机制的常识,也不需要考虑资源共享和竞争等概念。此外,裸机编程的调试过程也更加直观。
下面是裸机编程中常见的模式和架构:
1. 引脚配置和外设初始化:裸机编程的第一步是配置芯片的引脚和初始化外设。通过配置引脚的功能和模式,你可以连接和配置各种外设,如串口、定时器等。
2. 中断处理:中断是裸机编程中处理外部事件的常见方式,如定时器溢出、串口接收等。通过设置中断向量表和编写中断服务函数,你可以对外部事件进行及时响应和处理。
3. 状态机:裸机编程中经常使用状态机来处理复杂的任务。状态机将任务拆分为不同的状态,并根据当前状态和外部事件的触发来进行状态转移和处理。
4. 轮询方式:对于较简单的任务,裸机编程可以使用轮询方式来实现。也就是不断地查询和检测外部事件的状态,并根据需要做出相应的响应和处理。
5. 低功耗模式:裸机编程中可以通过设置芯片的低功耗模式来降低系统功耗。这可以通过配置和操作控制器状态机来实现。
6. 调试和测试:裸机编程具有直观性和简单性的特点,因此在调试和测试方面也相对容易。你可以使用调试器、示波器等工具来查看寄存器的值和程序的执行流程,以便定位问题并进行调试。 这些是裸机编程中常见的模式和架构。
对于初学者来说,裸机编程在一些相对简单的项目上具有一定的优势。然而,对于复杂的应用场景,使用操作系统和软件抽象层会更具优势。
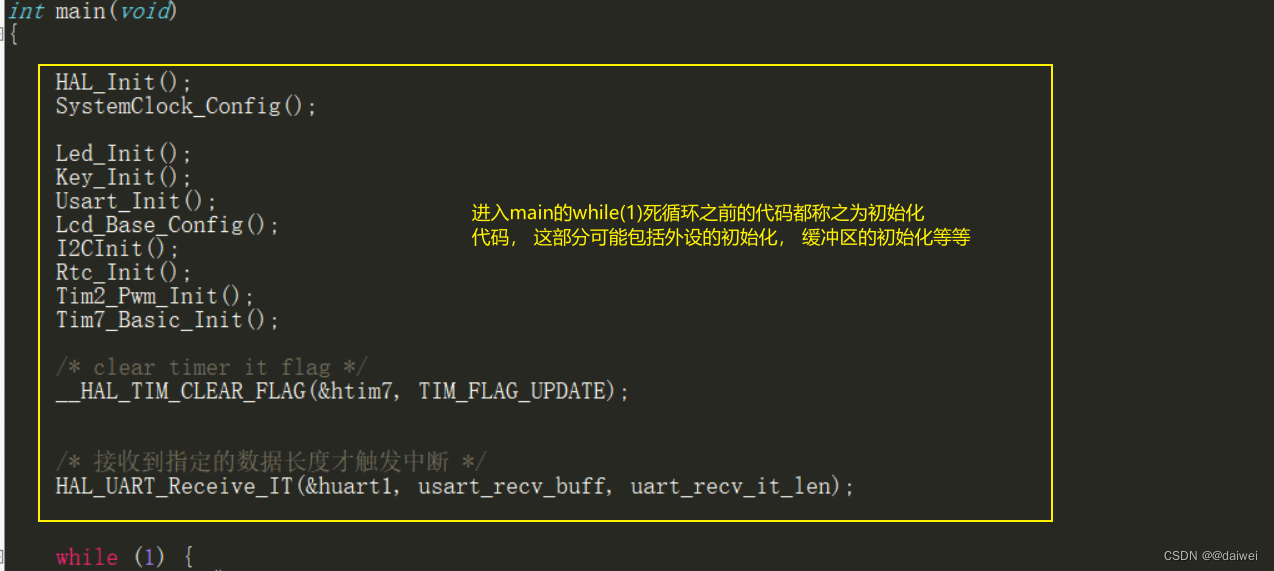
裸机编程模式/架构 1:初始化代码的编写
裸机编程模式/架构 2:轮询模式
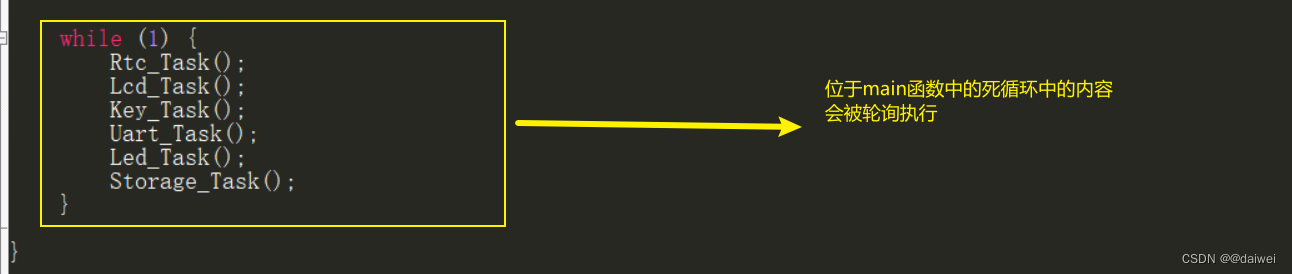
这些函数依次执行,全部执行完毕后再次从 第一个逻辑开始,以此不断循环。
这种模式是最简单也是最初级的模式,但其也存在很多问题。由于上述的每一个逻辑会依次执行,那么就会相互影响,因为是裸机嘛, 代码是串行执行的, 就会出现实行性不好的情况。
比如后续逻辑中存在一些交互行为,Key_Task()会判断一个按键的按下状态并做出响应,而此时还在 RTc_Task()中执行延时指令,那么整体运行就会显得非常卡顿,甚至还会因为错过用户按键的时机而导致即使按下了按键,也没有执行对应的反馈。这个实行性的问题也就是裸机的最大缺陷!
裸机编程模式/架构 3:轮询加中断执行模式
/* 按键中断的ISR */ void Key_Isr(void) { do_c(); } void main() { /* 初始化 */ /* . . . */ while(1) { do_a(); do_b(); } }如上图所示, 当程序中出现交互的设计的时候, 采用外部中断确实很好的解决了按键按下立马得到响应, 这种模式其实在很多简单的应用场景下已经够用了, 那我们接下来来挑一下这种模式的缺陷。
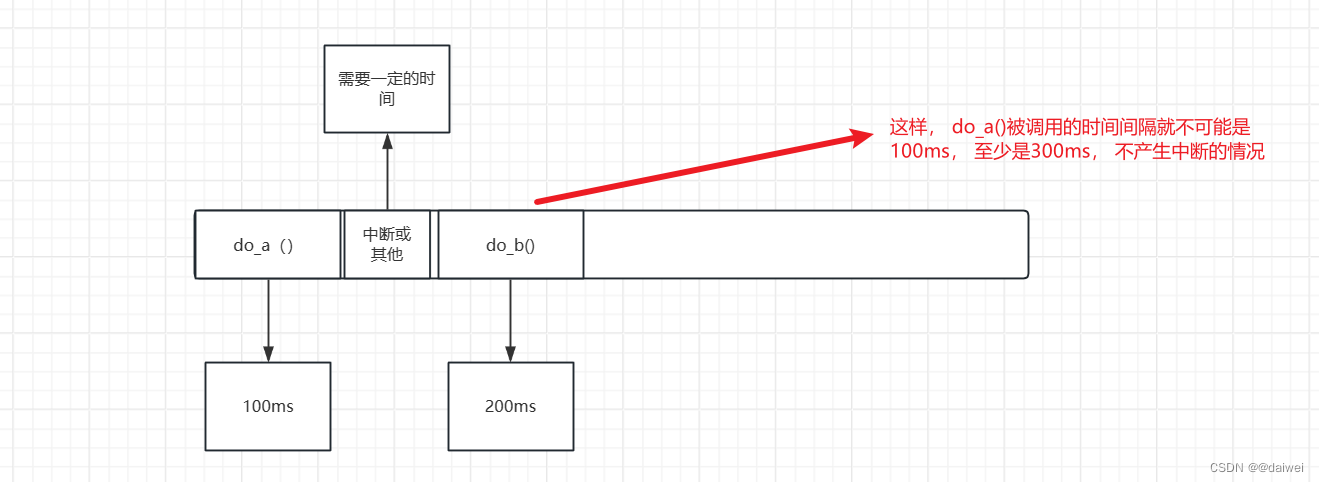
假设现在我有这样的一个需求, 需要在while(1)的轮询模式中, do_a()和do_b()每隔一定的时间调用一次, 是不是相当于这样。
/* 按键中断的ISR */ void Key_Isr(void) { do_c(); } void d0_a() { delay(100); } void d0_b() { delay(200); } void main() { /* 初始化 */ /* . . . */ while(1) { do_a(); do_b(); } }最初的想法是do_a()这个函数每隔100ms调用一次, 如果while(1)只有这个任务, 且不产生中断的情况, 是可以达到我们设想的要求的。但是有了中断和while(1)中不只执行一个函数的时候, 这种设计就是失败的。
裸机编程模式/架构 4:中断+定时器+主循环的前后台架构
__IO uint32_t a_tick, b_tick; /* 按键中断的ISR */ void Key_Isr(void) { do_c(); } void d0_a() { if(uwTick - a_tick < 100) return; a_tick = uwTick ; /* . . */ } void d0_b() { if(uwTick - b_tick < 200) return; b_tick = uwTick ; /* . . */ } void main() { /* 初始化 */ /* . . . */ while(1) { do_a(); do_b(); } }上述代码使用的system timer, 每隔1ms将uwTick这个全局变量加1, 使用定时器来辅助确定调用函数的时间间隔。这样, 就能保证在这种模式下while(1)中的每一个任务每隔一定的时间调用一次。
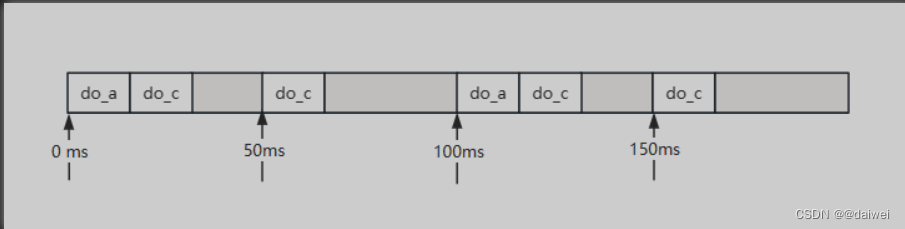
由于去掉了每个逻辑中的延时,取而代之的是标志位的判断,其执行速度是非常快的,如上图所示 ,灰色的块表示在运行判断逻辑并且没有满足运行要求。这种情况下每个逻辑都能在其指定的周期内得到执行。
这种架构在裸机编程中可以算得上一种中高级的架构,能够满足大多数不是特别复杂的需求。当然,在上图中我们可以看到 do_a 和 do_b 一个为 100 毫秒,一个为 50 毫秒,存在公倍数情况,也就是说在某一时刻,如这里的 0 毫秒和 100 毫秒,就会出现两个逻辑同时运行的场景。实际在项目中如果要求比较严格,会对这个周期进行一个控制和计算,尽量减少各逻辑同时执行的概率,避免由于同时执行的逻辑过多且过于频繁,执行时间的总和仍然会太长,从而影响整体运行稳定性的问题。
到这里请思考一下,假如 do_a 逻辑本身的执行时间就很长,比如进行一个非常复杂的运算,或者需要读取一个 G 级别的文件,导致单一逻辑的执行时间就超过了最小周期(如例子中的 50 毫秒),那即使 50 毫秒的周期到了,由于 do_a 还没运行完,do_c 也无法得到运行,这时候时间标志已经形同虚设,甚至由于此处是取余判断,假如 do_a 运行了 51 毫秒结束,do_b 在判断的时候已经是 52 毫秒,52%50 不为零,do_b 直接无法执行,时间标志甚至产生了负面影响!
虽说将 “通过取余运算判断是否可以执行的逻辑” 修改为 “设置多个时间标志(如 50ms_flag、100ms_flag等),在中断中判断满足时间就将这些标志置位,主循环中直接对这些标志进行判断的逻辑” 可以避免由于时间后延导致的无法触发逻辑执行问题,但仍然无法解决周期被影响的本质。
裸机编程模式/架构 5:前后台 + 状态机架构
void do_a(void) { static unsigned char step = 0; if (tick % 100 == 0) { switch (step) { case 0: // 执行第一步 step++; break; case 1: // 执行第二步 step++; break; case 2: // 执行第三步 step = 0; break; default: // 未知步骤,归零重来 step = 0; break; } } else { return; } }可以观察到原先的执行方式do_a,我们将其视为一个不可拆分的逻辑,直到完整执行完成才会退出。而现在,我们将其分解为三个步骤,在执行完一个步骤后就会退出do_a函数,在下一次进入时执行下一个步骤。这样一来,能够有效缩短每次执行do_a所需的时间,大大降低了执行时间超过最小周期的可能性。主循环中的其他应用逻辑也采用了类似的状态机模式,以加快主循环的响应效率,进一步提高了裸机编程的稳定性和时间可控性。 状态机的引入使裸机编程达到了其终极形态,使其能够处理更复杂的逻辑和应用。同时,代码量和复杂度也急剧增加,特别是当主循环中存在十几个甚至几十个任务逻辑时,面对的编程难度就变得非常高。 当然,即使你能够应对极高的挑战,最终仍会遇到一个问题——随着应用逻辑的增加,同时执行大量状态机分支步骤的时间总和很难再人工进行分解,而且不幸的是,它们的执行时间总和超过了预定的周期,导致了各种问题的出现。
此时恭喜你,已经达到了裸机编程的巅峰,也是裸机编程的极限。是时候迈开脚步,进入操作系统编程的领域了!
嵌入式常见的操作系统
类Unix操作系统

物联网操作系统/实时操作系统


以及uc/os, 华为的lite os等等, 大家都可以去学习学习其操作系统提供给我们的机制, 为什么使得我们的编程, 提升了上限。
