
阅读量:5
注释:
RTCM响应消息1020为GLONASS星历信息,暂不介绍,前公司暂未研发RTCM消息类型版本的DR/RTK模块,DR/RTK模块仅NMEA消息类型使用
注释:
公司使用的多信号语句类型为MSM4&MSM7,也应该是运用最广泛的语句类型,例如本人之前在公司开发的工具全是基于MSM7语句类型来进行的
1. 通用GNSS MSM描述
| MSM Type | Message Name | No. of Bits (upper bound) | NOTES | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
1353 for Nsat=16, Nsig=4 | ||||||||||||
2121 for Nsat=16, Nsig=4 | ||||||||||||
3081 for Nsat=16, Nsig=4 | ||||||||||||
3593 for Nsat=16, Nsig=4 | ||||||||||||
4841 for Nsat=16, Nsig=4 | ||||||||||||
4681 for Nsat=16, Nsig=4 | ||||||||||||
5929 for Nsat=16, Nsig=4 | ||||||||||||
注释:
在上表中,Nsat是指GNSS卫星的数量;Nsig是指传输消息中包含的不同信号的数量
该表提供了一个可以称之为“完整”GNSS星座的比特消耗上限。实际吞吐量将较低,特别是在“过渡期”期间,并非所有GNSS卫星都传输所有(Nsig)信号。
还提供了具体数字作为Nsat=16和Nsig=4情况的参考。
没有时钟控制的原始数据不得用于不传输“整数毫秒数”的消息。
当GNSS的时钟差超过0.25毫秒(模1秒)时,MSM1、MSM2和MSM3不得用于每个GNSS。在这些情况下,应使用MSM4、MSM5、MSM6或MSM7。
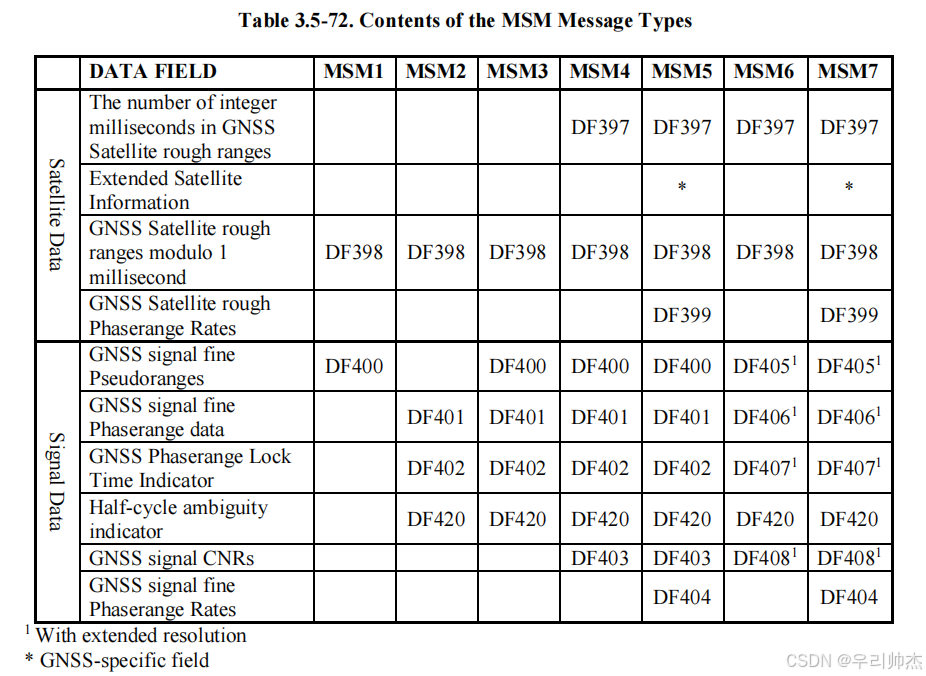
下表概述了MSM消息类型在消息紧凑性和数据可用性方面的差异
注释:
不同的MSM只是打包相同数据的不同方法,前提是这些消息的时钟转向指示器是相同的。这特别不要求RoughRange相同,但意味着对于给定历元上的给定卫星信号,重建的伪距和相位距将是相同的,而不管使用哪个特定的MSM来编码这些可观测值。
仅当MSM4-7未应用时钟控制时,MSM1-3和MSM4-7中打包的数据可能不同。
具有相同的时钟控制状态,重建的伪距、相位距和CNR与标准精度消息(MSM1-5)和高精度消息(MSMQ6-7)之间的差异仅在分辨率上不同。
与标准精度消息(MSM2-5)中的相同指示器相比,高精度消息(MS06和MSM7)中的GNSS相位锁定时间指示器具有更高的分辨率和更宽的范围。
初始化时应用于相位范围的模糊整数在所有MSM消息中应相同,无论是否使用转向时钟。
给定卫星的每个信号(i)的完整伪距、相位距和相位距速率可以按如下方式恢复:
对于标准精度消息:
伪距(i)=c/1000×(Nms+粗糙度范围/1024+2-24×精细伪距(i)),米,
相位范围(i)=c/1000×(Nms+粗糙度范围/1024+2-29×精细相位范围(i)),米,
相位范围速率(i)=粗糙度_相位范围速率+0.0001精细度_相位距离速率(ii),米/秒,
对于高精度消息:
伪距(i)=c/1000×(Nms+粗糙度范围/1024+2-29×精细伪距(i)),米,
相位范围(i)=c/1000×(Nms+粗糙度范围/1024+2-31×精细相位范围(i)),米,
相位范围速率(i)=粗糙度_相位范围速率+0.0001精细度_相位变化速率(ii),米/秒,
其中c是光速(米/秒)。
