
阅读量:5
1、点云数据简介
点云数据是三维空间中由大量二维点坐标组成的数据集合。每个点代表空间中的一个坐标点,可以包含有关该点的颜色、法向量、强度值等额外信息。点云数据可以通过激光扫描、结构光扫描、摄像机捕捉等方式获取,广泛应用于计算机视觉、机器人视觉、地图建模、三维重建等领域。
点云数据的特点包括:
- 无序性:点云数据中的点是无序的,需要进一步处理才能提取有用信息。
- 稀疏性:点云数据中的点通常是稀疏的,但可以通过点云重构等方法填充缺失区域。
- 多样性:点云数据可以包含不同属性的信息,如位置、颜色、法向量等。
- 三维信息:点云数据可以精确表示三维场景的形状和结构。
点云数据在许多应用中具有重要作用:
- 三维重建:利用点云数据可以构建真实世界场景的三维模型,用于虚拟现实、游戏开发等领域。
- 目标检测与识别:通过处理点云数据进行物体检测、识别和分类。
- 地图构建与导航:利用点云数据进行地图构建和导航、自动驾驶等应用。
- 工业应用:用于三维检测、质量控制、机器人视觉等领域。
处理点云数据需要使用相关的算法和技术,如点云配准、点云滤波、点云配准、点云分割等。点云数据的应用领域广泛,是计算机视觉和机器人领域重要的数据形式之一。
2、PLY 格式和 PCD 格式点云数据的异同点
PLY 格式和 PCD 格式都是常见的点云文件格式,但它们有一些区别和异同点:
PLY(Polygon File Format)格式:
- PLY 格式是一种灵活的三维数据文件格式,最初由斯坦福大学的Greg Schmidt和Paul Bourke设计,并经过广泛使用。
- PLY 文件可以包含多种类型的数据,如点、边、面等,以及属性信息。
- PLY 文件本身是一种文本文件格式,也可以使用二进制格式保存数据,二进制格式可以提高读写速度。
- PLY 文件通常包含关于点云的几何信息、颜色信息等。
PCD(Point Cloud Data)格式:
- PCD 格式是点云数据存储的一种格式,最初由 Point Cloud Library(PCL)定义和支持。
- PCD 文件通常包含点云的位置、颜色、法向等属性信息。
- PCD 格式文件可以存储单个点云或多个点云,并且可以包含有序或无序的点云数据。
- PCD 文件可以以ASCII文本格式或二进制格式存储点云数据。
异同点:
- PLY 格式和 PCD 格式都适用于存储点云数据,但 PLY 格式更加通用,适用于多种类型的三维数据,而 PCD 格式专门用于点云数据;
- PLY 格式的文件可以包含更丰富的几何信息和属性信息,而 PCD 格式更专注于点云数据的存储;
- PLY 格式的文件通常比 PCD 格式的文件更大,因为包含更多的信息。
综上所述,PLY 格式和 PCD 格式都可以用于存储点云数据,选择使用哪种格式取决于具体的应用需求和数据格式。如果需要额外的几何信息或属性信息,可以选择使用PLY格式;如果只需存储点云的位置、颜色等基本信息,PCD格式可能更加简洁和高效。
3、有色点与无色点云数据的区别
有色点云数据与无色点云数据的主要区别在于是否包含颜色信息。有色点云数据包含每个点的颜色信息,而无色点云数据只包含点的空间位置信息。
有色点云数据:
- 每个点包含有关颜色的信息,通常以RGB或RGBA格式表示;
- 可以呈现真实世界中的物体颜色,有利于视觉识别和分析;
- 适用于需要颜色信息的应用,如三维视觉识别、表面重建等。
无色点云数据:
- 只包含每个点的空间位置信息,不包含颜色信息;
- 数据文件通常更小,占用空间更小;
- 可能会丢失一些细节信息,无法展现真实物体的颜色。
在实际应用中,根据具体的需求和场景选择使用有色或无色点云数据。例如,在进行三维建模和表面重建时,有色点云数据可以提供更加真实的效果;而在点云配准和分割任务中,无色点云数据可能更加简洁和高效。
4、无色点云数据导入显示保存(.ply文件)
pcread()函数
pcread()函数用于从文件中读取点云数据并将其加载到 MATLAB 中。- 该函数可以读取多种点云文件格式,如PLY、PCD、LAS等。
- 语法为
ptCloud = pcread(filename),其中filename为点云文件的路径和名称,ptCloud是表示点云数据的点云对象。
pcshow()函数
pcshow()函数用于在 MATLAB 中可视化显示点云数据。- 可以用来查看、分析和处理点云数据。
- 语法为
pcshow(ptCloud),其中ptCloud是表示点云数据的点云对象。
pcwrite()函数
pcwrite()函数用于将 MATLAB 中的点云数据写入到文件中保存。- 可以将点云数据保存为各种点云文件格式。
- 语法为
pcwrite(ptCloud, filename),其中ptCloud是表示点云数据的点云对象,filename是要保存点云数据的文件名。
代码:
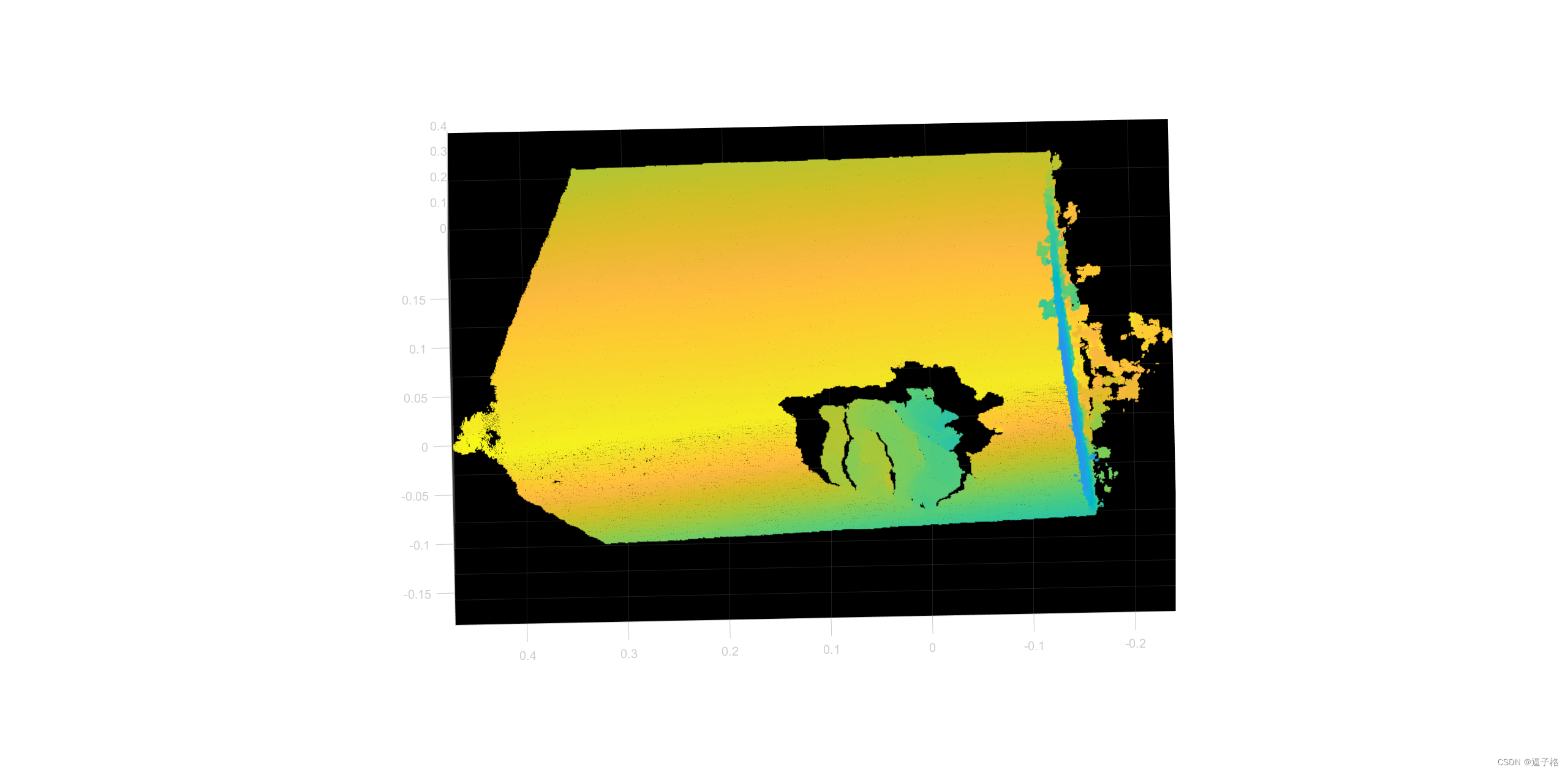
figure(1)%窗口1 WS=pcread('C:\Users\16023\Desktop\例程\WSDY.ply');%导入无色ply格式点云 pcshow(WS) pcwrite(WS,'WSDY1.ply')显示效果:
5、有色点云数据导入显示保存(.ply文件)
代码:
figure(2)%窗口2 CSDY=pcread('C:\Users\16023\Desktop\例程\CSDY.ply');%导入有色ply格式点云 pcshow(CSDY) pcwrite(CSDY,'CSDY1.pcd')显示效果:

6、有色点云数据导入显示保存(.pcd文件)
代码:
figure(3)%窗口2 CSDYP=pcread('C:\Users\16023\Desktop\例程\CSDY1.pcd');%导入有色pcd格式点云 pcshow(CSDYP)显示效果:

7、斯坦福大学经典点云模型数据(ply/pcd文件)
简介
斯坦福大学提供了一些经典的点云模型数据集,这些数据集被广泛用于计算机视觉、计算机图形学等领域的研究和实践。其中一些常见的经典点云模型数据包括:
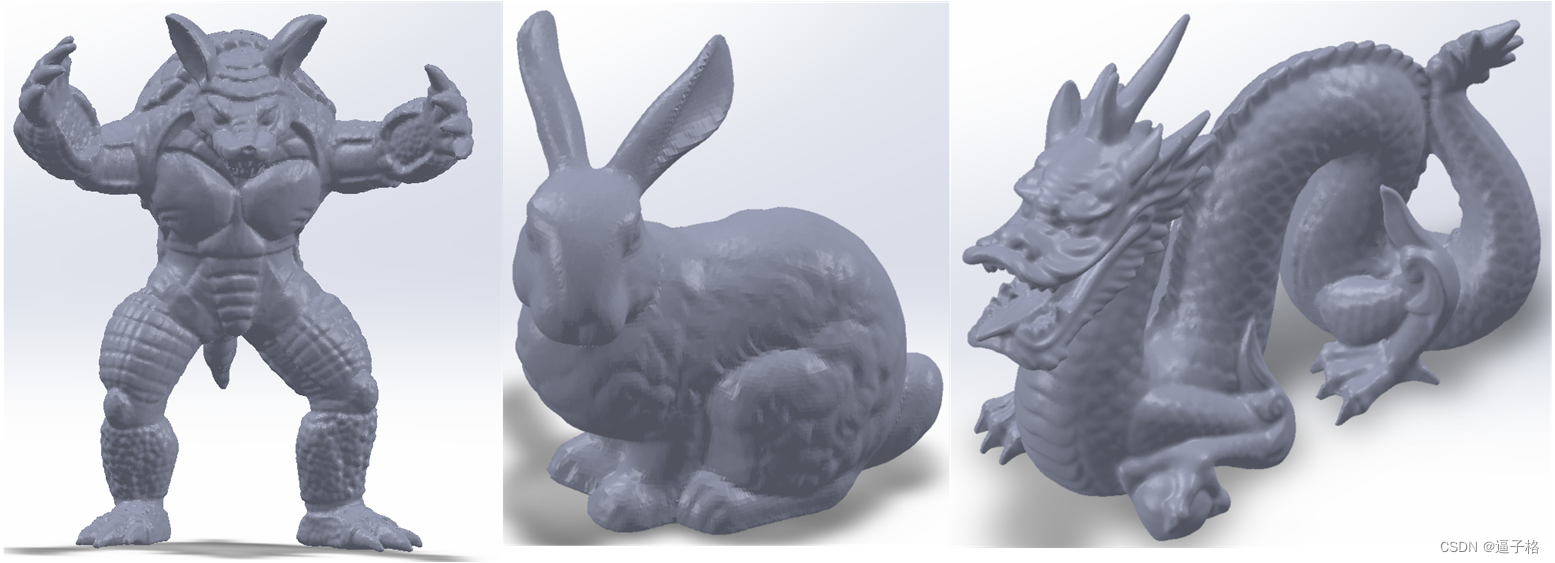
Stanford Bunny(斯坦福兔子):这是一个三维兔子模型,具有复杂的几何形状和细节,常用于三维重建、形状识别等任务。
Stanford Dragon(斯坦福龙):这是一个具有许多细节和复杂结构的三维龙模型,被广泛用于三维建模、计算机图形学等领域。
Stanford Armadillo(斯坦福犰狳):这是一个犰狳模型,具有多边形细节和曲面形状,常用于三维重建、形状分析等应用。
这些经典的点云模型数据集通常提供了高质量的三维模型数据,可以帮助研究人员和开发者进行算法测试、性能评估和模型比较等工作。使用这些数据集可以加快研究和实验的进展,并促进学术交流和合作。
注释:总计九个点云模型的.ply和.pcd文件
点云显示:
https://download.csdn.net/download/XU157303764/89352074
8、总结
在 MATLAB 中处理点云数据可以使用 PointCloud 类或者读取外部点云文件的方式。以下是一些常见的操作方法:
使用 PointCloud 类:
- 创建点云对象:在 MATLAB 中使用 PointCloud 类可以创建点云对象,可以通过手动输入点云数据或者通过其他方式创建。
% 创建一个简单的点云对象 ptCloud = pointCloud([1, 2, 3; 4, 5, 6; 7, 8, 9]);- 显示点云:可以使用 pcshow 函数显示点云数据。
pcshow(ptCloud) % 显示点云- 保存点云文件:可以使用 plyWrite 函数将点云数据保存为 PLY 格式。
pcwrite(ptCloud, 'pointCloud.ply', 'PLYFormat', 'binary');读取外部点云文件:
- 读取点云文件:可以使用 pcread 函数读取外部的点云文件,如PLY、PCD等格式。
ptCloud = pcread('pointCloud.ply');- 显示点云:同样使用 pcshow 函数显示点云数据。
pcshow(ptCloud) % 显示点云
通过以上方法,您可以在 MATLAB 中打开、显示和保存点云文件。根据实际需求选择合适的方法处理点云数据。
