
阅读量:7
若该文为原创文章,转载请注明原文出处
本文章博客地址:https://hpzwl.blog.csdn.net/article/details/140435870
长沙红胖子Qt(长沙创微智科)博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结合等等)持续更新中…
OpenCV开发专栏(点击传送门)
上一篇:《OpenCV开发笔记(七十七):相机标定(二):通过棋盘标定计算相机内参矩阵矫正畸变摄像头图像》
下一篇:持续补充中…
前言
Python上的OpenCv开发,在linux上的基本环境搭建流程。
安装python
以python2.7为开发版本。
sudo apt-get install python2.7 sudo apt-get install python2.7-dev 安装OpenCV
多种方式,先选择最简单的方式。
sudo apt-get install python-opencv 打开摄像头
测试Demo
import cv2 import numpy cap = cv2.VideoCapture(0) while 1: ret, frame = cap.read() cv2.imshow("capture", frame) if cv2.waitKey(100) & 0xff == ord('q'): break cap.release() cv2.destroyAllWindows() 

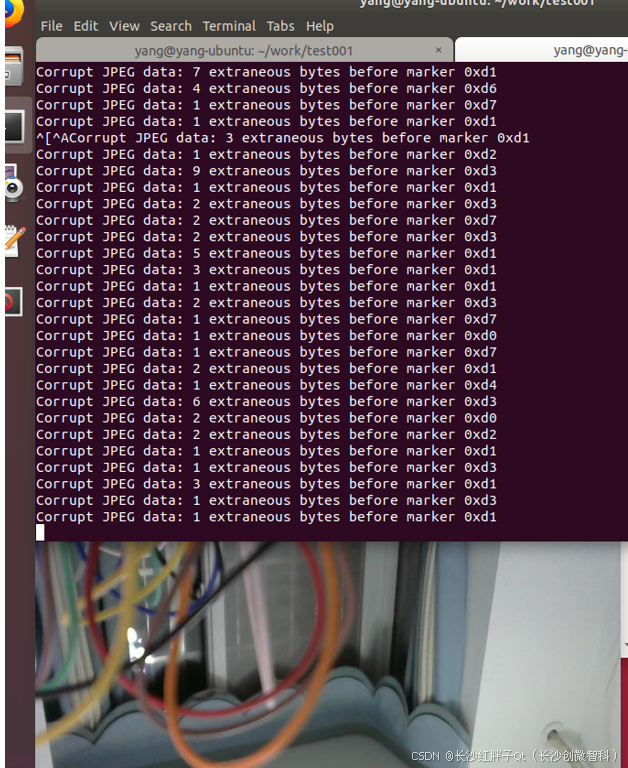
测试结果
模板匹配
测试Demo
import cv2 import numpy # read template image template = cv2.imread("src.png") #cv2.imshow("template", template); # read target image target = cv2.imread("dst.png") #cv2.imshow("target", target) # get tempalte's width and height tHeight, tWidth = template.shape[:2] print tHeight, tWidth # matches result = cv2.matchTemplate(target, template, cv2.TM_SQDIFF_NORMED) # normalize cv2.normalize(result, result, 0, 1, cv2.NORM_MINMAX, -1) minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(result) strminVal = str(minVal) print strminVal cv2.rectangle(target, minLoc, (minLoc[0] + tWidth, minLoc[1] + tHeight), (0,0,255), 2) cv2.imshow("result", target) cv2.waitKey() cv2.destroyAllWindows() 测试结果

Flann特征点匹配
版本回退
在opencv3.4.x大版本后,4.x系列的sift被申请了专利,无法使用了,flann需要使用到
sift = cv2.xfeatures2d.SIFT_create() 所以需要回退版本。
sudo apt-get remove python-opencv sudo pip install opencv-python==3.4.2.16 安装模块库matplotlib
python -m pip install matplotlib sudo apt-get install python-tk pip install opencv-contrib-python==3.4.2.16 测试Demo
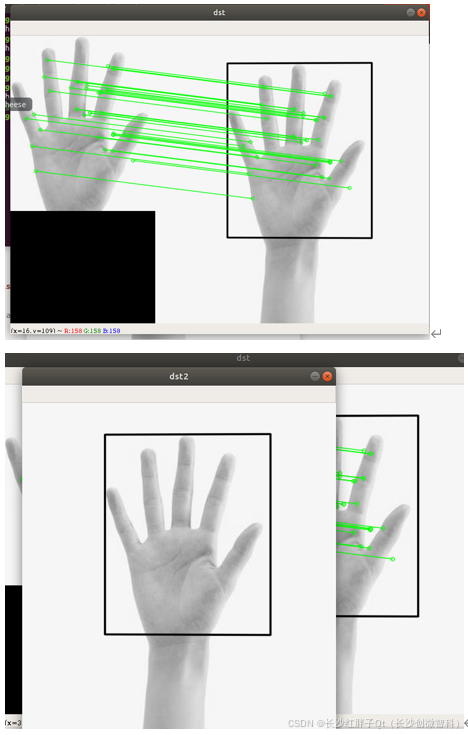
# FLANN based Matcher import numpy as np import cv2 from matplotlib import pyplot as plt #min match count is 10 MIN_MATCH_COUNT = 10 # queryImage template = cv2.imread('src.png',0) # trainImage target = cv2.imread('dst.png',0) # initiate SIFT detector sift = cv2.xfeatures2d.SIFT_create() # find the keypoints and descriptors with SIFT kp1, des1 = sift.detectAndCompute(template,None) kp2, des2 = sift.detectAndCompute(target,None) # create FLANN match FLANN_INDEX_KDTREE = 0 index_params = dict(algorithm = FLANN_INDEX_KDTREE, trees = 5) search_params = dict(checks = 50) flann = cv2.FlannBasedMatcher(index_params, search_params) matches = flann.knnMatch(des1,des2,k=2) # store all the good matches as per Lowe's ratio test. good = [] # lose < 0.7 for m,n in matches: if m.distance < 0.7*n.distance: good.append(m) if len(good)>MIN_MATCH_COUNT: # get key src_pts = np.float32([ kp1[m.queryIdx].pt for m in good ]).reshape(-1,1,2) dst_pts = np.float32([ kp2[m.trainIdx].pt for m in good ]).reshape(-1,1,2) # cal mat and mask M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0) matchesMask = mask.ravel().tolist() h,w = template.shape # convert 4 corner pts = np.float32([ [0,0],[0,h-1],[w-1,h-1],[w-1,0] ]).reshape(-1,1,2) dst = cv2.perspectiveTransform(pts,M) cv2.polylines(target,[np.int32(dst)],True,0,2, cv2.LINE_AA) else: print( "Not enough matches are found - %d/%d" % (len(good),MIN_MATCH_COUNT)) matchesMask = None draw_params = dict(matchColor=(0,255,0), singlePointColor=None, matchesMask=matchesMask, flags=2) result = cv2.drawMatches(template, kp1, target, kp2, good, None, **draw_params) cv2.imshow("dst", result) cv2.imshow("dst2", target) cv2.waitKey() 测试结果
上一篇:《OpenCV开发笔记(七十七):相机标定(二):通过棋盘标定计算相机内参矩阵矫正畸变摄像头图像》
下一篇:持续补充中…
本文章博客地址:https://hpzwl.blog.csdn.net/article/details/140435870
