
阅读量:2
文章目录
二阶Givens旋转矩阵
在QR分解中,Givens旋转是一种用于将矩阵变成上三角形的技术。
别的教程里面往往会直接给出一个n*n阶的通用Givens矩阵形式,但是这样太过抽象难懂了,而且难以领略到Givens变换的背后内涵,四臂西瓜我在学习矩阵论的时候就深陷其害,现在我写这篇教程,就是淋过雨,要为后人撑伞!
Givens矩阵,也可以叫旋转矩阵,它实际上是通过旋转,归零矩阵中的特定元素。不好理解吧?看了下面的例子就明白了。
为了方便理解,我们先以二阶为例。
作用于向量
现在我们手上有这么一个向量:
a 1 = ( 4 2 ) a_1 = \begin{pmatrix} 4\\2\end{pmatrix} a1=(42)
现在我们想把这个向量,旋转到x轴上,变成
a 1 ′ = ( r 0 ) a_1^{'} = \begin{pmatrix} r\\0\end{pmatrix} a1′=(r0)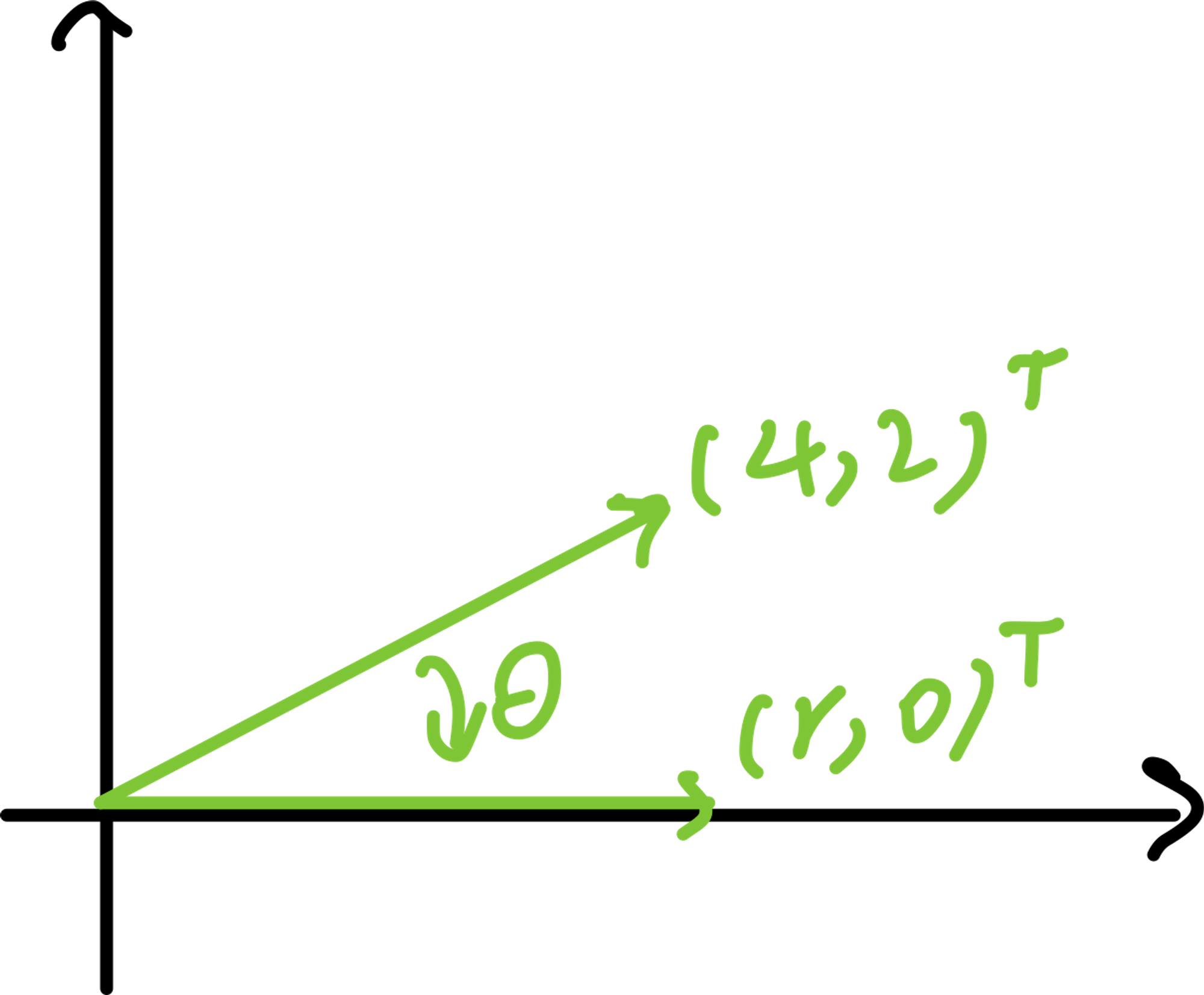
这个变换可以用如下的方式进行表示:
( c s − s c ) ( 4 2 ) = ( 4 c + 2 s − 4 s + 2 c ) = ( r 0 ) = a 1 ′ \begin{pmatrix}c&s\\-s&c\end{pmatrix}\begin{pmatrix}4\\2\end{pmatrix} = \begin{pmatrix}4c+2s \\ -4s+2c \end{pmatrix}=\begin{pmatrix}r\\0\end{pmatrix}= a_1^{'} (c−ssc)(42)=(4c+2s−4s+2c)=(r0)=a1′
此处的
( c s − s c ) = ( cos ( θ ) sin ( θ ) − sin ( θ ) cos ( θ ) ) \begin{pmatrix}c&s\\-s&c\end{pmatrix} = \begin{pmatrix}\cos(\theta)&\sin(\theta)\\-\sin(\theta)&\cos(\theta)\end{pmatrix} (c−ssc)=(cos(θ)−sin(θ)sin(θ)cos(θ))
表示一个标准的旋转矩阵。对应向量旋转角度$ \theta$。
于是我们可以得到下面的方程组
{ 4 c + 2 s = r − 4 s + 2 c = 0 \left \{ \begin{matrix} 4c+2s &= r \\ -4s+2c &= 0 \end{matrix} \right. {4c+2s−4s+2c=r=0
因为是旋转变换,所以向量的模值不会改变, r = 4 2 + 2 2 r = \sqrt{4^2+2^2} r=42+22就是这个模值
{ 4 c + 2 s = 4 2 + 2 2 − 4 s + 2 c = 0 \left \{ \begin{matrix} 4c+2s &=& \sqrt{4^2+2^2} \\ -4s+2c &=& 0 \end{matrix} \right. {4c+2s−4s+2c==42+220
可以解得
{ c = 2 4 2 + 2 2 = 2 20 = 2 4.4721 = 0.4472 s = 4 4 2 + 2 2 = 4 20 = 4 4.4721 = 0.8944 \left \{ \begin{aligned}c&=\frac{2}{\sqrt{4^{2}+2^{2}}}=\frac{2}{\sqrt{20}}=\frac{2}{4.4721}=0.4472\\s&=\frac{4}{\sqrt{4^{2}+2^{2}}}=\frac{4}{\sqrt{20}}=\frac{4}{4.4721}=0.8944\end{aligned} \right. ⎩⎨⎧cs=42+222=202=4.47212=0.4472=42+224=204=4.47214=0.8944
因此可以得到旋转矩阵
G = ( c s − s c ) = ( 0.4472 0.8944 − 0.8944 0.4472 ) G=\begin{pmatrix}c&s\\-s&c\end{pmatrix}=\begin{pmatrix}0.4472&0.8944\\-0.8944&0.4472\end{pmatrix} G=(c−ssc)=(0.4472−0.89440.89440.4472)
现在我们终于得到了最终的运算,成功将向量旋转到了x轴上,将y坐标清零。
G ( 4 2 ) = ( 0.4472 0.8944 − 0.8944 0.4472 ) ( 4 2 ) = ( 4.4721 0 ) G\begin{pmatrix}4\\2\end{pmatrix}=\begin{pmatrix}0.4472&0.8944\\-0.8944&0.4472\end{pmatrix}\begin{pmatrix}4\\2\end{pmatrix}=\begin{pmatrix}4.4721\\0\end{pmatrix} G(42)=(0.4472−0.89440.89440.4472)(42)=(4.47210)
作用于矩阵
理解了上述的过程后,现在我们可以看下旋转矩阵作用于矩阵的效果了。我们有如下矩阵,他左边的向量就是上一部分的
A = ( 4 1 2 1 ) A=\begin{pmatrix}4&1\\2&1\end{pmatrix} A=(4211)
直接将上一节计算的旋转矩阵作用于 A A A
G ( 4 1 2 1 ) = ( 4.4721 1.3416 0 − 0.4472 ) G\begin{pmatrix}4&1\\2&1\end{pmatrix}=\begin{pmatrix}4.4721&1.3416\\0&-0.4472\end{pmatrix} G(4211)=(4.472101.3416−0.4472)
确实将A矩阵变为了上三角矩阵,实现了QR分解。其中左边的向量,正是上一节计算出来的结果。相信大家看到这里就有所领悟了。
对于矩阵,我们可以把它理解为多个列向量拼接而成。
a 1 = ( 4 2 ) a 2 = ( 1 1 ) a_1 = \begin{pmatrix} 4\\2\end{pmatrix}\\ a_2 = \begin{pmatrix} 1\\1\end{pmatrix} a1=(42)a2=(11)
那么A可以理解为他们水平拼接在一起
A = [ a 1 ∣ ∣ a 2 ] A = [a_1||a_2] A=[a1∣∣a2]
根据拼接的运算性质,旋转矩阵作用于A,相当于分别作用于 a 1 a_1 a1和 a 2 a_2 a2,再将它们拼接在一起。
G ⋅ [ a 1 ∣ ∣ a 2 ] = [ G ⋅ a 1 ∣ ∣ G ⋅ a 2 ] G\cdot[a_1||a_2]=[G\cdot a_1||G\cdot a_2] G⋅[a1∣∣a2]=[G⋅a1∣∣G⋅a2]
我们现在借助这个性质再来理解下givens作用于矩阵
G ( 4 2 ) = ( 0.4472 0.8944 − 0.8944 0.4472 ) ( 4 2 ) = ( 4.4721 0 ) G\begin{pmatrix}4\\2\end{pmatrix}=\begin{pmatrix}0.4472&0.8944\\-0.8944&0.4472\end{pmatrix}\begin{pmatrix}4\\2\end{pmatrix}=\begin{pmatrix}4.4721\\0\end{pmatrix} G(42)=(0.4472−0.89440.89440.4472)(42)=(4.47210)
G ( 1 1 ) = ( 0.4472 0.8944 − 0.8944 0.4472 ) ( 1 1 ) = ( 1.3416 − 0.4472 ) G\begin{pmatrix}1\\1\end{pmatrix}=\begin{pmatrix}0.4472&0.8944\\-0.8944&0.4472\end{pmatrix}\begin{pmatrix}1\\1\end{pmatrix}=\begin{pmatrix}1.3416\\-0.4472\end{pmatrix} G(11)=(0.4472−0.89440.89440.4472)(11)=(1.3416−0.4472)
对于 a 1 a_1 a1向量,借助旋转矩阵成功清零y坐标;对于 a 2 a_2 a2矩阵,旋转矩阵作用后,得到新的向量
这里给大家留个思考,有没有可能, a 2 a_2 a2矩阵,经过旋转矩阵后y轴也被清零?
G ⋅ [ a 1 ∣ ∣ a 2 ] = [ G ⋅ a 1 ∣ ∣ G ⋅ a 2 ] = [ G ( 4 2 ) ∣ ∣ G ( 1 1 ) ] = ( 4.4721 1.3416 0 − 0.4472 ) G\cdot[a_1||a_2]=[G\cdot a_1||G\cdot a_2] =[G\begin{pmatrix}4\\2\end{pmatrix} ||G\begin{pmatrix}1\\1\end{pmatrix}] =\begin{pmatrix}4.4721&1.3416\\0&-0.4472\end{pmatrix} G⋅[a1∣∣a2]=[G⋅a1∣∣G⋅a2]=[G(42)∣∣G(11)]=(4.472101.3416−0.4472)
现在我们来总结下上面的清空过程,我们选择第一个列向量,通过构造givens矩阵,将其第二行清零,使得矩阵整体变为上三角形式。
到这里,相信大家能够理解最一开始的那句话,givens矩阵通过旋转作用,将矩阵变化为上三角形式。
更一般的情况
我们有如下矩阵,我们希望将c的位置,清零。
A = ( a b c d ) A=\begin{pmatrix}a&b\\c&d\end{pmatrix} A=(acbd)
构造旋转矩阵
G = ( c s − s c ) G=\begin{pmatrix}c&s\\-s&c\end{pmatrix} G=(c−ssc)
得到
( c s − s c ) ( a c ) = ( r 0 ) \begin{pmatrix}c&s\\-s&c\end{pmatrix}\begin{pmatrix}a\\c\end{pmatrix}=\begin{pmatrix}r\\0\end{pmatrix} (c−ssc)(ac)=(r0)
解方程后,我们就可以得到最终的形式:
s = sin ( θ ) = a a 2 + c 2 c = cos ( θ ) = c a 2 + c 2 \begin{aligned}s=\sin(\theta)=\frac a{\sqrt{a^2+c^2}}\\c=\cos(\theta)=\frac c{\sqrt{a^2+c^2}}\end{aligned} s=sin(θ)=a2+c2ac=cos(θ)=a2+c2c
这边读者可以带入前面的二阶例子中,熟悉计算过程,加深理解。
