
阅读量:0
长文预警,加代码5000多字,写了4个多小时,盘软件架构,这篇文章就够了!
可能很多工程师,工作了很多年,都不会有软件架构的概念。
因为我在做研发工程师的第6年,才开始意识到这个东西,在此之前,都是做一些比较简单的项目,一个main函数干到底,架构复杂了反而是累赘。
后面有幸,接触了稍微复杂点的项目,感觉以前水平Hold不住,然后借着项目需求,学习了很多优秀的代码架构,比如以前同事的,一些模组厂的SDK,还有市面上成熟的系统。
说出来可能有点夸张,一个好项目带来的成长,顶你做几年小项目。
在一个工程师从入门到成为高级工程师,都会经历哪些软件架构?
下面给大家盘点一下,每个都提供了简易的架构模型代码。
1.线性架构
这是最简单的一种程序设计方法,也就是我们在入门时写的,下面是一个使用C语言编写的线性架构示例:
#include <reg51.h> // 包含51系列单片机的寄存器定义 // 延时函数,用于产生一定的延迟 void delay(unsigned int count) { unsigned int i; while(count--) { for(i = 0; i < 120; i++) {} // 空循环,用于产生延迟 } } void main() { // 初始设置P1端口为输出模式,用于控制LED P1 = 0xFF; // 将P1端口设置为高电平,关闭所有LED while(1) { // 无限循环 P1 = 0x00; // 将P1端口设置为低电平,点亮所有LED delay(500000); // 调用延时函数,延迟一段时间 P1 = 0xFF; // 将P1端口设置为高电平,关闭所有LED delay(500000); // 再次调用延时函数,延迟相同的时间 } }2.模块化架构
模块化架构是一种将程序分解为独立模块的设计方法,每个模块执行特定的任务。
这种架构有助于代码的重用、维护和测试。
下面是一个使用C语言编写的模块化架构示例,该程序模拟了一个简单的交通信号灯控制系统。
#include <reg51.h> // 包含51系列单片机的寄存器定义 // 定义信号灯的状态 typedef enum { RED_LIGHT, YELLOW_LIGHT, GREEN_LIGHT } TrafficLightState; // 函数声明 void initializeTrafficLight(void); void setTrafficLight(TrafficLightState state); void delay(unsigned int milliseconds); // 信号灯控制主函数 void main(void) { initializeTrafficLight(); // 初始化交通信号灯 while(1) { setTrafficLight(RED_LIGHT); delay(5000); // 红灯亮5秒 setTrafficLight(YELLOW_LIGHT); delay(2000); // 黄灯亮2秒 setTrafficLight(GREEN_LIGHT); delay(5000); // 绿灯亮5秒 } } // 初始化交通信号灯的函数 void initializeTrafficLight(void) { // 这里可以添加初始化代码,比如设置端口方向、默认状态等 // 假设P1端口连接了信号灯,初始状态为熄灭(高电平) P1 = 0xFF; } // 设置交通信号灯状态的函数 void setTrafficLight(TrafficLightState state) { switch(state) { case RED_LIGHT: // 设置红灯亮,其他灯灭 P1 = 0b11100000; // 假设低电平有效,这里设置P1.0为低电平,其余为高电平 break; case YELLOW_LIGHT: // 设置黄灯亮,其他灯灭 P1 = 0b11011000; // 设置P1.1为低电平,其余为高电平 break; case GREEN_LIGHT: // 设置绿灯亮,其他灯灭 P1 = 0b11000111; // 设置P1.2为低电平,其余为高电平 break; default: // 默认为熄灭所有灯 P1 = 0xFF; break; } } // 延时函数,参数是毫秒数 void delay(unsigned int milliseconds) { unsigned int delayCount = 0; while(milliseconds--) { for(delayCount = 0; delayCount < 120; delayCount++) { // 空循环,用于产生延时 } } }3.层次化架构
层次化架构是一种将系统分解为多个层次的设计方法,每个层次负责不同的功能。
着以下是一个使用C语言编写的层次化架构示例,模拟了一个具有不同权限级别的嵌入式系统。
#include <reg51.h> // 包含51系列单片机的寄存器定义 // 定义不同的操作级别 typedef enum { LEVEL_USER, LEVEL_ADMIN, LEVEL_SUPERUSER } OperationLevel; // 函数声明 void systemInit(void); void performOperation(OperationLevel level); void displayMessage(char* message); // 系统初始化后的主循环 void main(void) { systemInit(); // 系统初始化 // 模拟用户操作 performOperation(LEVEL_USER); // 模拟管理员操作 performOperation(LEVEL_ADMIN); // 模拟超级用户操作 performOperation(LEVEL_SUPERUSER); while(1) { // 主循环可以是空闲循环或者处理其他低优先级任务 } } // 系统初始化函数 void systemInit(void) { // 初始化系统资源,如设置端口、中断等 // 这里省略具体的初始化代码 } // 执行不同级别操作的函数 void performOperation(OperationLevel level) { switch(level) { case LEVEL_USER: //用户操作具体代码 break; case LEVEL_ADMIN: //管理员操作具体代码 break; case LEVEL_SUPERUSER: //超级用户操作具体代码 break; } } // 显示消息的函数 void displayMessage(char* message) { // 这里省略了实际的显示代码,因为单片机通常没有直接的屏幕输出 // 消息可以通过LED闪烁、串口输出或其他方式展示 // 假设通过P1端口的LED展示,每个字符对应一个LED闪烁模式 // 实际应用中,需要根据硬件设计来实现消息的显示 } 4.事件驱动架构
事件驱动架构是一种编程范式,其中程序的执行流程由事件(如用户输入、传感器变化、定时器到期等)触发。
在单片机开发中,事件驱动架构通常用于响应外部硬件中断或软件中断。
以下是一个使用C语言编写的事件驱动架构示例,模拟了一个基于按键输入的LED控制。
#include <reg51.h> // 包含51系列单片机的寄存器定义 // 定义按键和LED的状态 #define KEY_PORT P3 // 假设按键连接在P3端口 #define LED_PORT P2 // 假设LED连接在P2端口 // 函数声明 void delay(unsigned int milliseconds); bit checkKeyPress(void); // 返回按键是否被按下的状态(1表示按下,0表示未按下) // 定时器初始化函数 void timer0Init(void) { TMOD = 0x01; // 设置定时器模式寄存器,使用模式1(16位定时器) TH0 = 0xFC; // 设置定时器初值,用于产生定时中断 TL0 = 0x18; ET0 = 1; // 开启定时器0中断 EA = 1; // 开启总中断 TR0 = 1; // 启动定时器 } // 定时器中断服务程序 void timer0_ISR() interrupt 1 { // 定时器溢出后自动重新加载初值,无需手动重置 // 这里可以放置定时器溢出后需要执行的代码 } // 按键中断服务程序 bit keyPress_ISR(void) interrupt 2 using 1 { if(KEY_PORT != 0xFF) // 检测是否有按键按下 { LED_PORT = ~LED_PORT; // 如果有按键按下,切换LED状态 delay(20); // 去抖动延时 while(KEY_PORT != 0xFF); // 等待按键释放 return 1; // 返回按键已按下 } return 0; // 如果没有按键按下,返回0 } // 延时函数,参数是毫秒数 void delay(unsigned int milliseconds) { unsigned int i, j; for(i = 0; i < milliseconds; i++) for(j = 0; j < 1200; j++); // 空循环,用于产生延时 } // 主函数 void main(void) { timer0Init(); // 初始化定时器 LED_PORT = 0xFF; // 初始LED熄灭(假设低电平点亮LED) while(1) { if(checkKeyPress()) { // 检查是否有按键按下事件 // 如果有按键按下,这里可以添加额外的处理代码 } } } // 检查按键是否被按下的函数 bit checkKeyPress(void) { bit keyState = 0; // 模拟按键中断触发,实际应用中需要连接硬件中断 if(1) // 假设按键中断触发 { keyState = keyPress_ISR(); // 调用按键中断服务程序 } return keyState; // 返回按键状态 }事实上,真正的事件型驱动架构,是非常复杂的,我职业生涯的巅峰之作,就是用的事件型驱动架构。
5.状态机架构
在单片机开发中,状态机常用于处理复杂的逻辑和事件序列,如用户界面管理、协议解析等。
以下是一个使用C语言编写的有限状态机(FSM)的示例,模拟了一个简单的自动售货机的状态转换。
#include <reg51.h> // 包含51系列单片机的寄存器定义 // 定义自动售货机的状态 typedef enum { IDLE, COIN_INSERTED, PRODUCT_SELECTED, DISPENSE, CHANGE_RETURNED } VendingMachineState; // 定义事件 typedef enum { COIN_EVENT, PRODUCT_EVENT, DISPENSE_EVENT, REFUND_EVENT } VendingMachineEvent; // 函数声明 void processEvent(VendingMachineEvent event); void dispenseProduct(void); void returnChange(void); // 当前状态 VendingMachineState currentState = IDLE; // 主函数 void main(void) { // 初始化代码(如果有) // ... while(1) { // 假设事件由外部触发,这里使用一个模拟事件 VendingMachineEvent currentEvent = COIN_EVENT; // 模拟投入硬币事件 processEvent(currentEvent); // 处理当前事件 } } // 处理事件的函数 void processEvent(VendingMachineEvent event) { switch(currentState) { case IDLE: if(event == COIN_EVENT) { // 如果在空闲状态且检测到硬币投入事件,则转换到硬币投入状态 currentState = COIN_INSERTED; } break; case COIN_INSERTED: if(event == PRODUCT_EVENT) { // 如果在硬币投入状态且用户选择商品,则请求出货 currentState = PRODUCT_SELECTED; } break; case PRODUCT_SELECTED: if(event == DISPENSE_EVENT) { dispenseProduct(); // 出货商品 currentState = DISPENSE; } break; case DISPENSE: if(event == REFUND_EVENT) { returnChange(); // 返回找零 currentState = CHANGE_RETURNED; } break; case CHANGE_RETURNED: // 等待下一个循环,返回到IDLE状态 currentState = IDLE; break; default: // 如果状态非法,重置为IDLE状态 currentState = IDLE; break; } } // 出货商品的函数 void dispenseProduct(void) { // 这里添加出货逻辑,例如激活电机推出商品 // 假设P1端口连接了出货电机 P1 = 0x00; // 激活电机 // ... 出货逻辑 P1 = 0xFF; // 关闭电机 } // 返回找零的函数 void returnChange(void) { // 这里添加找零逻辑,例如激活机械臂放置零钱 // 假设P2端口连接了找零机械臂 P2 = 0x00; // 激活机械臂 // ... 找零逻辑 P2 = 0xFF; // 关闭机械臂 }6.面向对象架构
STM32的库,就是一种面向对象的架构。
不过在单片机由于资源限制,OOP并不像在高级语言中那样常见,但是一些基本概念如封装和抽象仍然可以被应用。
虽然C语言本身并不直接支持面向对象编程,但可以通过结构体和函数指针模拟一些面向对象的特性。
下面是一个简化的示例,展示如何在C语言中模拟面向对象的编程风格,以51单片机为背景,创建一个简单的LED类。
#include <reg51.h> // 定义一个LED类 typedef struct { unsigned char state; // LED的状态 unsigned char pin; // LED连接的引脚 void (*turnOn)(struct LED*); // 点亮LED的方法 void (*turnOff)(struct LED*); // 熄灭LED的方法 } LED; // LED类的构造函数 void LED_Init(LED* led, unsigned char pin) { led->state = 0; // 默认状态为熄灭 led->pin = pin; // 设置LED连接的引脚 } // 点亮LED的方法 void LED_TurnOn(LED* led) { // 根据引脚状态点亮LED if(led->pin < 8) { P0 |= (1 << led->pin); // 假设P0.0到P0.7连接了8个LED } else { P1 &= ~(1 << (led->pin - 8)); // 假设P1.0到P1.7连接了另外8个LED } led->state = 1; // 更新状态为点亮 } // 熄灭LED的方法 void LED_TurnOff(LED* led) { // 根据引脚状态熄灭LED if(led->pin < 8) { P0 &= ~(1 << led->pin); // 熄灭P0上的LED } else { P1 |= (1 << (led->pin - 8)); // 熄灭P1上的LED } led->state = 0; // 更新状态为熄灭 } // 主函数 void main(void) { LED myLed; // 创建一个LED对象 LED_Init(&myLed, 3); // 初始化LED对象,连接在P0.3 // 给LED对象绑定方法 myLed.turnOn = LED_TurnOn; myLed.turnOff = LED_TurnOff; // 使用面向对象的风格控制LED while(1) { myLed.turnOn(&myLed); // 点亮LED // 延时 myLed.turnOff(&myLed); // 熄灭LED // 延时 } }这段代码定义了一个结构体LED,模拟面向对象中的“类。
这个示例仅用于展示如何在C语言中模拟面向对象的风格,并没有使用真正的面向对象编程语言的特性,如继承和多态,不过对于单片机的应用,足以。
7.基于任务的架构
这种我最喜欢用,结构,逻辑清晰,每个任务都能灵活调度。
基于任务的架构是将程序分解为独立的任务,每个任务执行特定的工作。
在单片机开发中,如果没有使用实时操作系统,我们可以通过编写一个简单的轮询调度器来模拟基于任务的架构。
以下是一个使用C语言编写的基于任务的架构的示例,该程序在51单片机上实现。
为了简化,我们将使用一个简单的轮询调度器来在两个任务之间切换:一个是按键扫描任务,另一个是LED闪烁任务。
#include <reg51.h> // 假设P1.0是LED输出 sbit LED = P1^0; // 全局变量,用于记录系统Tick unsigned int systemTick = 0; // 任务函数声明 void taskLEDBlink(void); void taskKeyScan(void); // 定时器0中断服务程序,用于产生Tick void timer0_ISR() interrupt 1 using 1 { // 定时器溢出后自动重新加载初值,无需手动重置 systemTick++; // 更新系统Tick计数器 } // 任务调度器,主函数中调用,负责任务轮询 void taskScheduler(void) { // 检查系统Tick,决定是否执行任务 // 例如,如果我们需要每1000个Tick执行一次LED闪烁任务 if (systemTick % 1000 == 0) { taskLEDBlink(); } // 如果有按键任务,可以类似地检查Tick并执行 if (systemTick % 10 == 0) { taskKeyScan(); } } // LED闪烁任务 void taskLEDBlink(void) { static bit ledState = 0; // 用于记录LED的当前状态 ledState = !ledState; // 切换LED状态 LED = ledState; // 更新LED硬件状态 } // 按键扫描任务(示例中省略具体实现) void taskKeyScan(void) { // 按键扫描逻辑 } // 主函数 void main(void) { // 初始化LED状态 LED = 0; // 定时器0初始化设置 TMOD &= 0xF0; // 设置定时器模式寄存器,使用模式1(16位定时器/计数器) TH0 = 0x4C; // 设置定时器初值,产生定时中断(定时周期取决于系统时钟频率) TL0 = 0x00; ET0 = 1; // 允许定时器0中断 EA = 1; // 允许中断 TR0 = 1; // 启动定时器0 while(1) { taskScheduler(); // 调用任务调度器 } }这里只是举个简单的例子,这个代码示例,比较适合51和stm8这种资源非常少的单片机。
8.代理架构
这个大家或许比较少听到过,但在稍微复杂的项目中,是非常常用的。
在代理架构中,每个代理(Agent)都是一个独立的实体,它封装了特定的决策逻辑和数据,并与其他代理进行交互。
在实际项目中,需要创建多个独立的任务或模块,每个模块负责特定的功能,并通过某种机制(如消息队列、事件触发等)进行通信。
这种方式可以大大提高程序可扩展性和可移植性。
以下是一个LED和按键代理的简化模型。
#include <reg51.h> // 包含51系列单片机的寄存器定义 // 假设P3.5是按键输入,P1.0是LED输出 sbit KEY = P3^5; sbit LED = P1^0; typedef struct { unsigned char pin; // 代理关联的引脚 void (*action)(void); // 代理的行为函数 } Agent; // 按键代理的行为函数声明 void keyAction(void); // LED代理的行为函数声明 void ledAction(void); // 代理数组,存储所有代理的行为和关联的引脚 Agent agents[] = { {5, keyAction}, // 按键代理,关联P3.5 {0, ledAction} // LED代理,关联P1.0 }; // 按键代理的行为函数 void keyAction(void) { if(KEY == 0) // 检测按键是否被按下 { LED = !LED; // 如果按键被按下,切换LED状态 while(KEY == 0); // 等待按键释放 } } // LED代理的行为函数 void ledAction(void) { static unsigned int toggleCounter = 0; toggleCounter++; if(toggleCounter == 500) // 假设每500个时钟周期切换一次LED { LED = !LED; // 切换LED状态 toggleCounter = 0; // 重置计数器 } } // 主函数 void main(void) { unsigned char agentIndex; // 主循环 while(1) { for(agentIndex = 0; agentIndex < sizeof(agents) / sizeof(agents[0]); agentIndex++) { // 调用每个代理的行为函数 (*agents[agentIndex].action)(); // 注意函数指针的调用方式 } } }9.组件化架构
组件化架构是一种将软件系统分解为独立、可重用组件的方法。
将程序分割成负责特定任务的模块,如LED控制、按键处理、传感器读数等。
每个组件可以独立开发和测试,然后被组合在一起形成完整的系统。
以下是一个简化的组件化架构示例,模拟了一个单片机系统中的LED控制和按键输入处理两个组件。
为了简化,组件间的通信将通过直接函数调用来模拟。
#include <reg51.h> // 包含51系列单片机的寄存器定义 // 定义组件结构体 typedef struct { void (*init)(void); // 组件初始化函数 void (*task)(void); // 组件任务函数 } Component; // 假设P3.5是按键输入,P1.0是LED输出 sbit KEY = P3^5; sbit LED = P1^0; // LED组件 void LED_Init(void) { LED = 0; // 初始化LED状态为关闭 } void LED_Task(void) { static unsigned int toggleCounter = 0; toggleCounter++; if (toggleCounter >= 1000) // 假设每1000个时钟周期切换一次LED { LED = !LED; // 切换LED状态 toggleCounter = 0; // 重置计数器 } } // 按键组件 void KEY_Init(void) { // 按键初始化代码 } void KEY_Task(void) { if (KEY == 0) // 检测按键是否被按下 { LED = !LED; // 如果按键被按下,切换LED状态 while(KEY == 0); // 等待按键释放 } } // 组件数组,存储系统中所有组件的初始化和任务函数 Component components[] = { {LED_Init, LED_Task}, {KEY_Init, KEY_Task} }; // 系统初始化函数,调用所有组件的初始化函数 void System_Init(void) { unsigned char componentIndex; for (componentIndex = 0; componentIndex < sizeof(components) / sizeof(components[0]); componentIndex++) { components[componentIndex].init(); } } // 主循环,调用所有组件的任务函数 void main(void) { System_Init(); // 系统初始化 while(1) { unsigned char componentIndex; for (componentIndex = 0; componentIndex < sizeof(components) / sizeof(components[0]); componentIndex++) { components[componentIndex].task(); // 调用组件任务 } } }以上几种,我都整理到单片机入门到高级资料+工具包了,大家可自行在朋友圈找我安排。
当然,以上都是最简易的代码模型,如果想用于实际项目,很多细节还要优化。
后面为了适应更复杂的项目,我基于以上这几种编程思维,重构了代码,使OS变得移植性和扩展性更强,用起来也更灵活。
我在2019年,也系统录制过关于这套架构的教程,粉丝可找我安排。

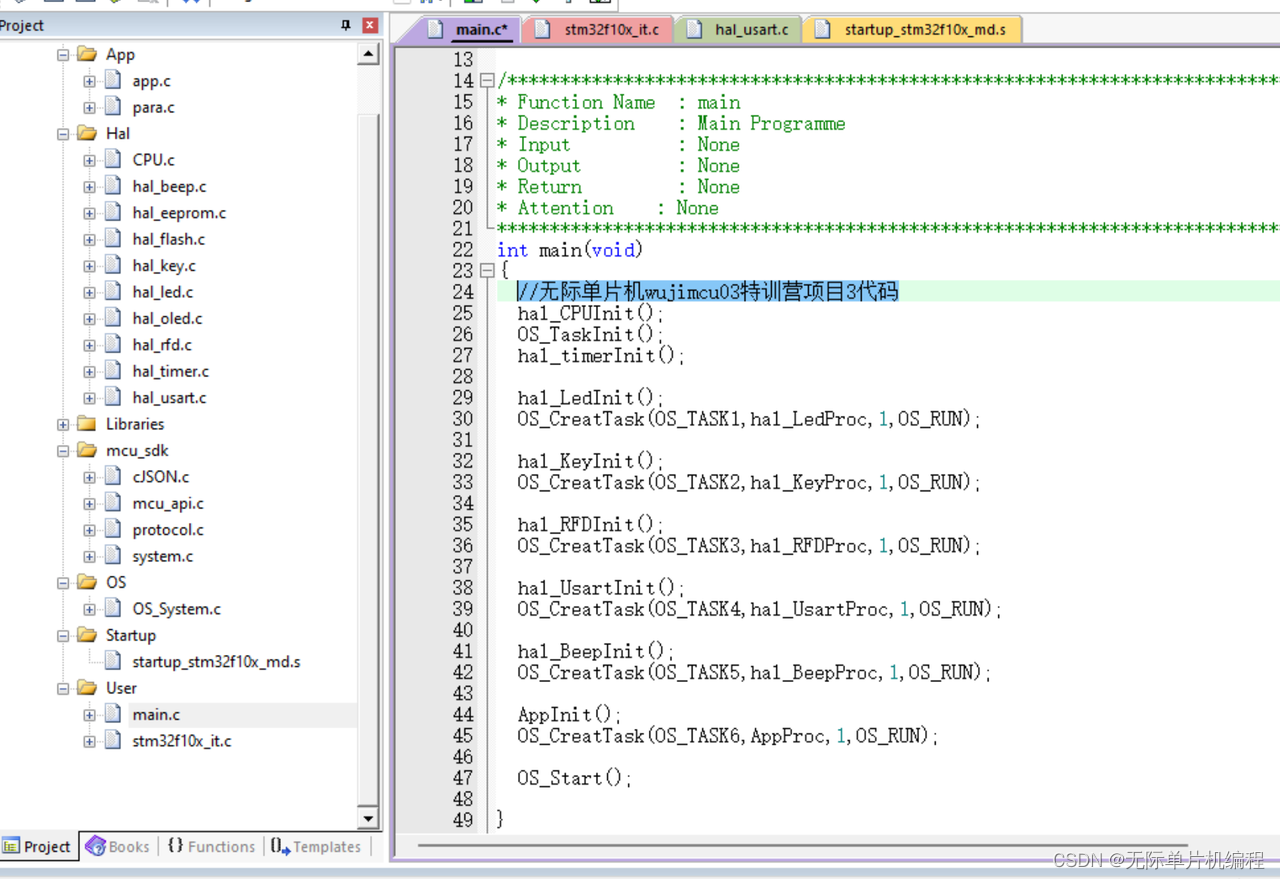
目前我们无际单片机特训营项目3和6就是采用这种架构,稳的一批。
如果想系统提升编程思维和代码水平,还是得从0到1去学习我们项目,并不是说技术有多难,而是很多思维和实现细节,没有参考,没人指点,靠自己需要摸索很久。
除了以上架构,更复杂的就是RTOS了。
不过一般对于有架构设计能力的工程师来说,更习惯于使用传统的裸机编程方式,这种方式可能更直观且可控。
