阅读量:1
报错原因:最开始我把依赖一直都是在base环境下安装的,没有conda deactivate,而pip install的东西应该装在系统环境,不能装在base环境下,sudo apt 是装在系统环境的
1.检查ros
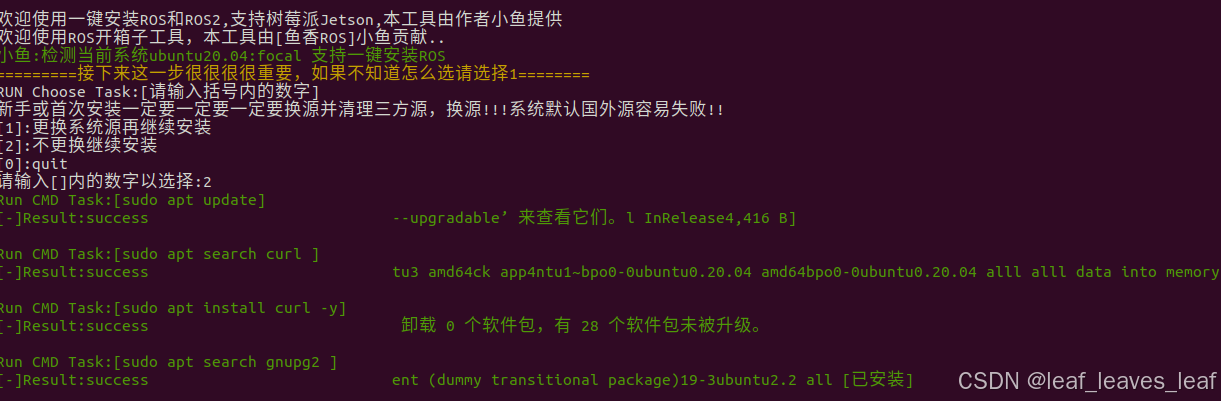
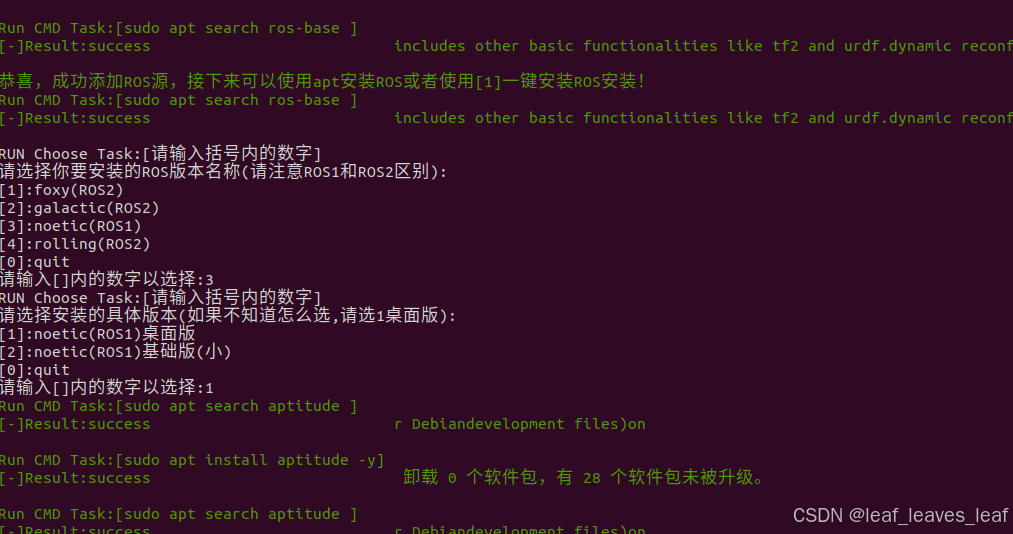
用鱼香ros安装
wget http://fishros.com/install -O fishros && . fishros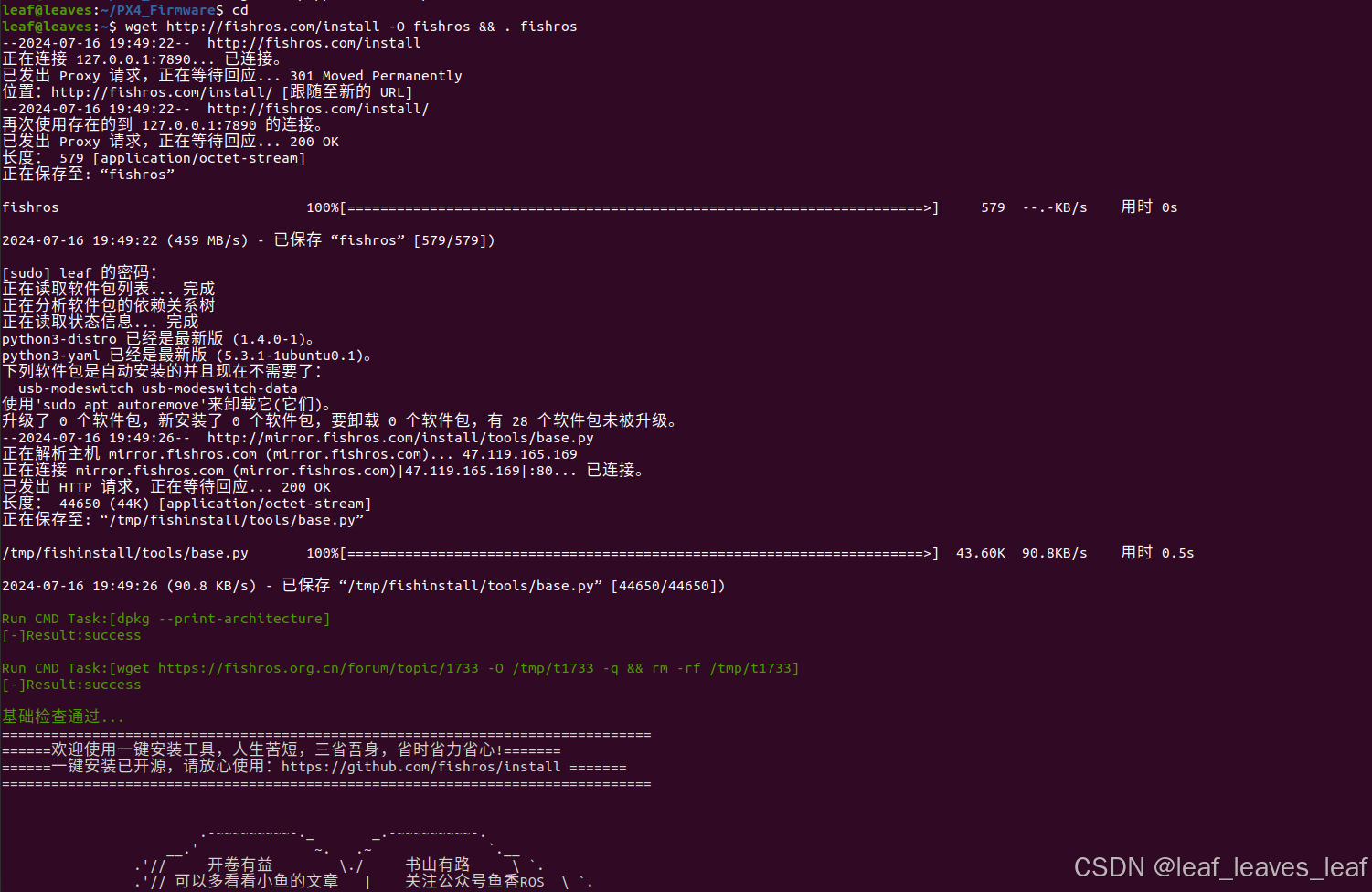
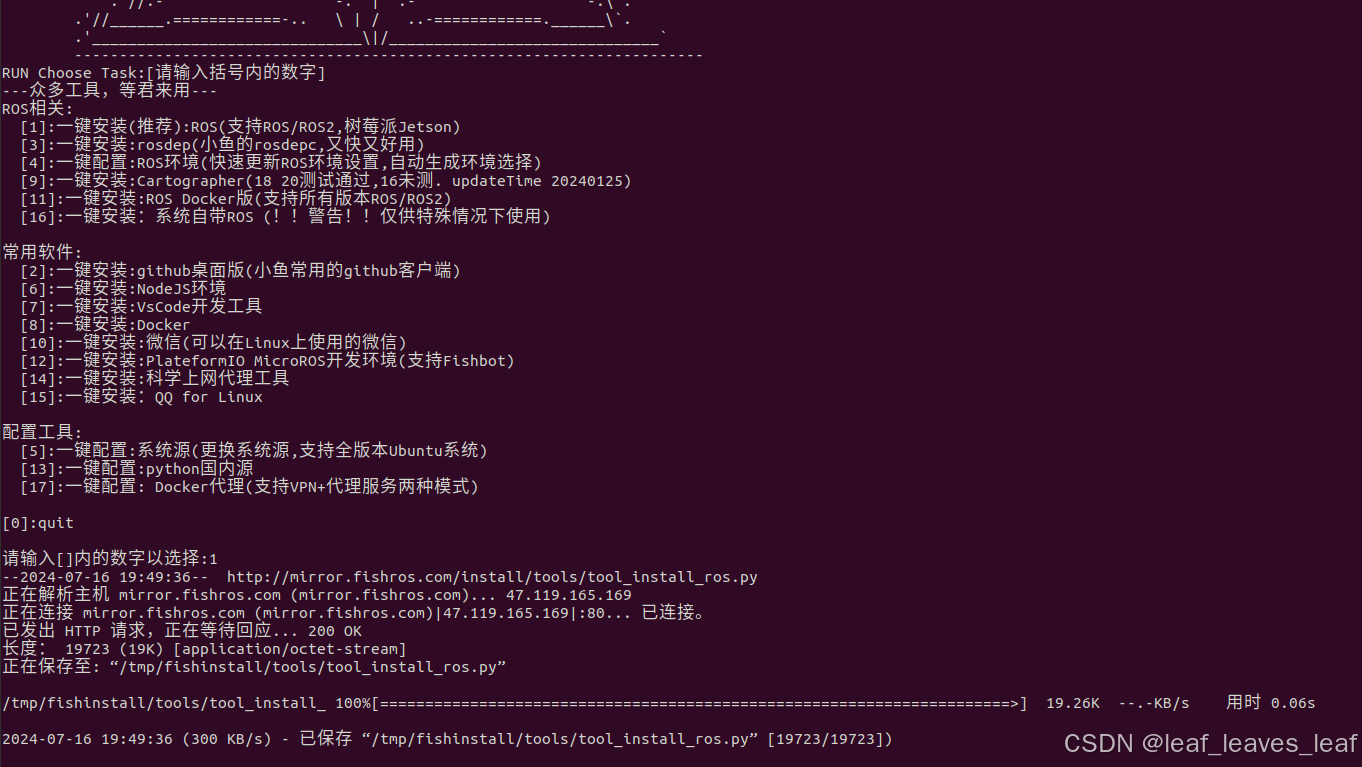
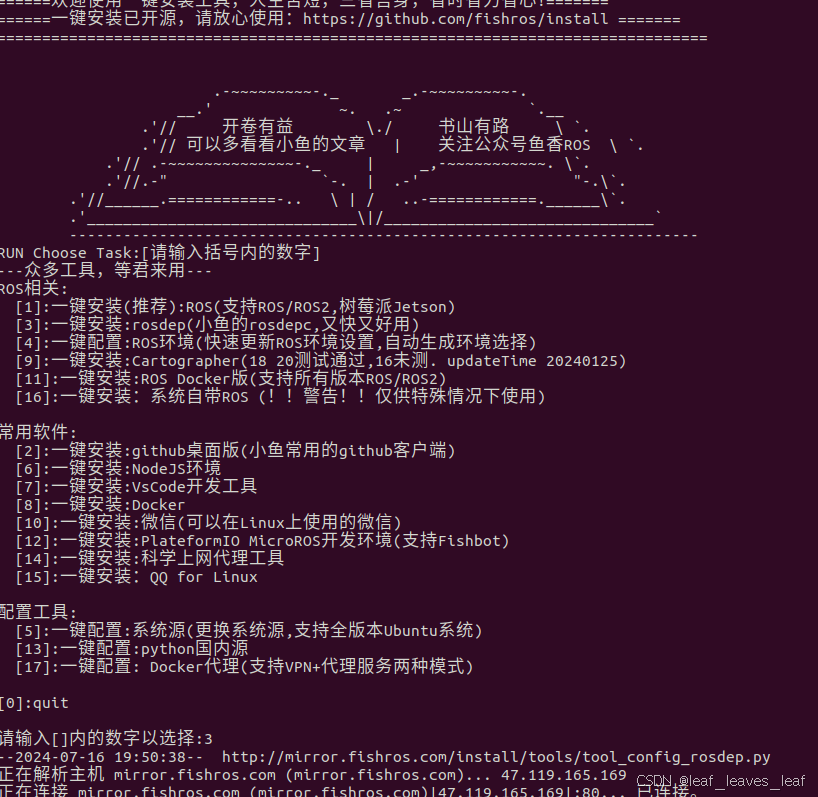
再运行一下,选择3,安装 rosdep
wget http://fishros.com/install -O fishros && . fishros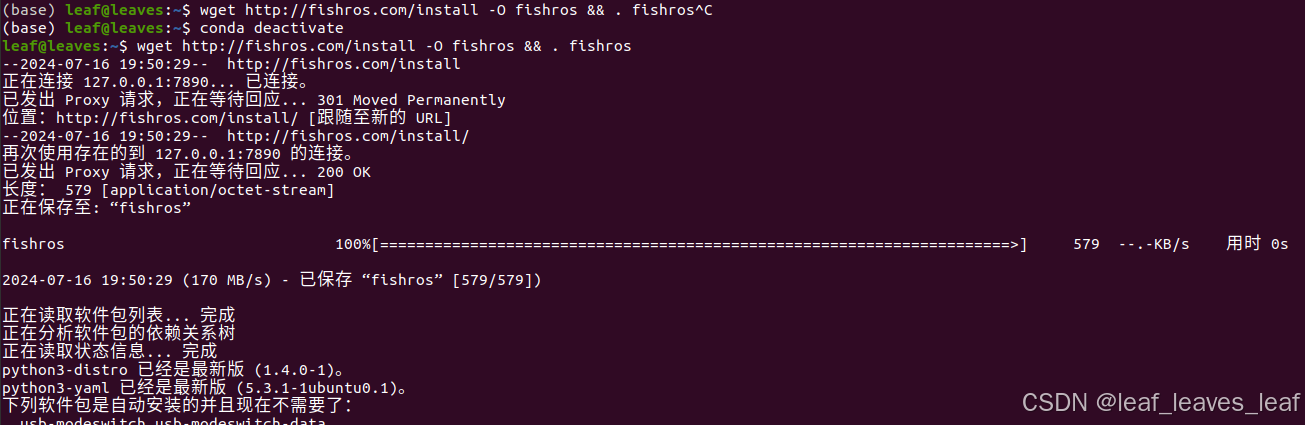
2.退出base环境
依赖不能在base环境下安装
conda deactivate
再运行
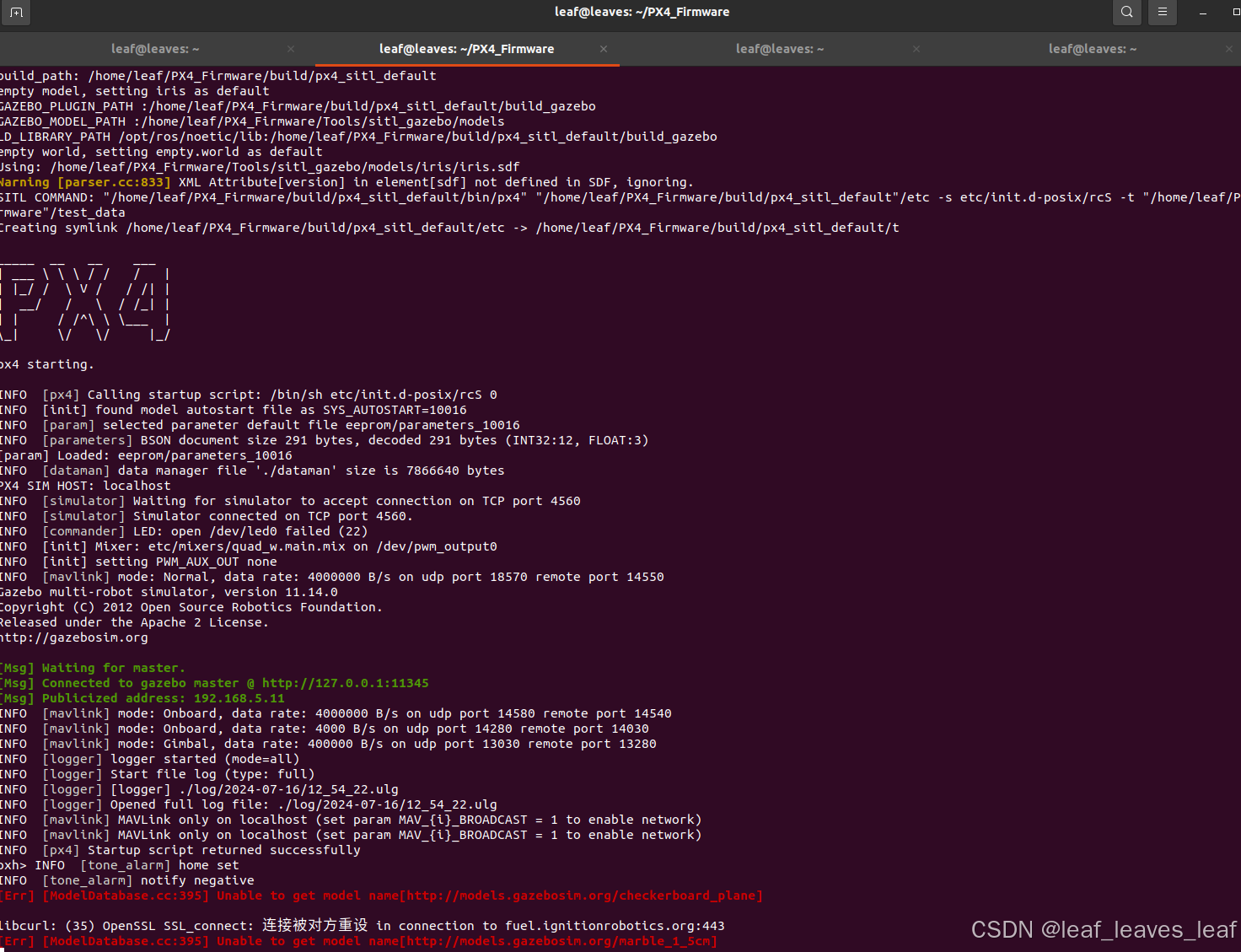
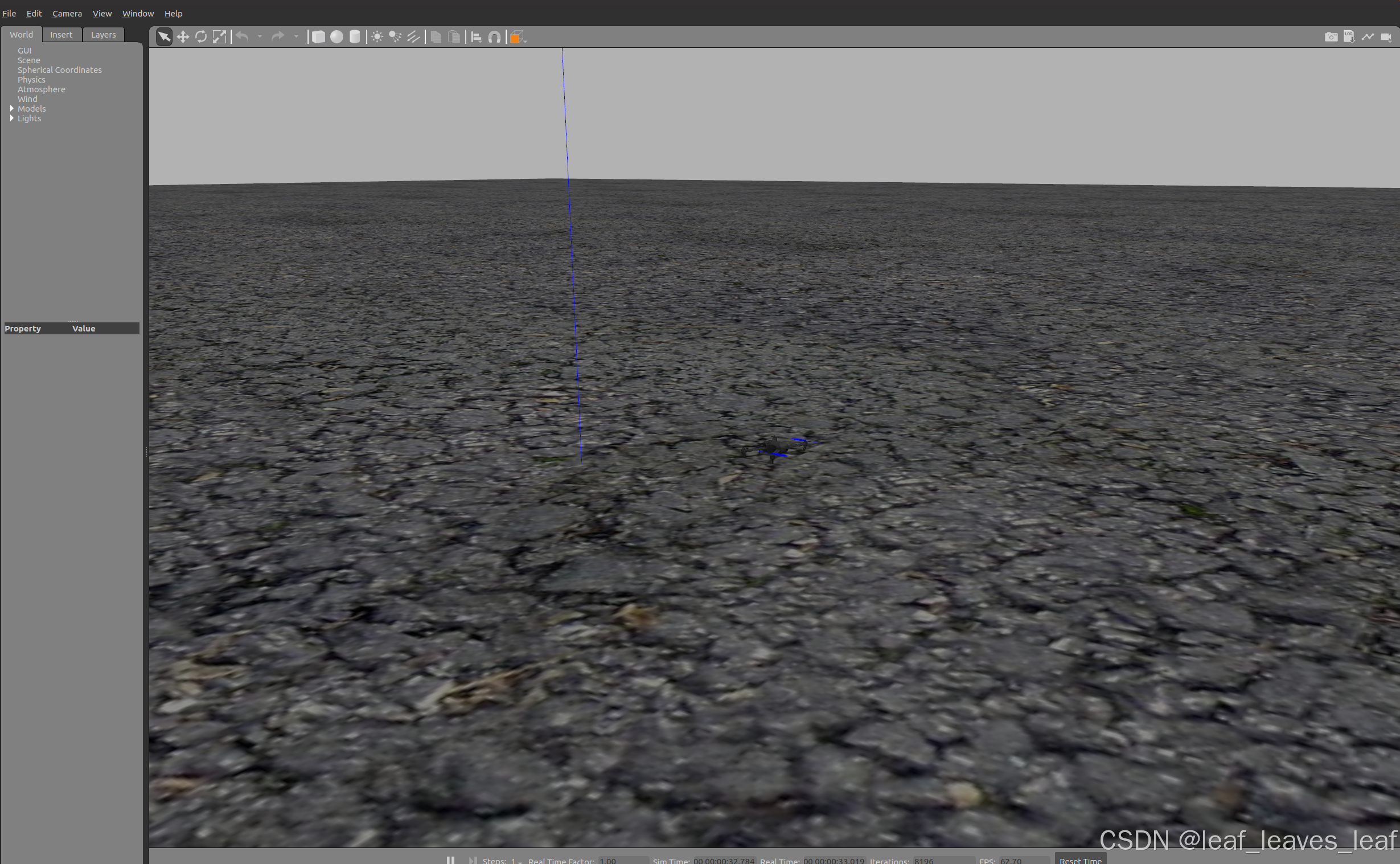
pip3 install packaging numpy empy toml pyyaml jinja2 pyargparse kconfiglib jsonschema future pyserial cerberus pyulog==0.7.0 pyquaternion sudo apt-get install ros-noetic-moveit-msgs ros-noetic-object-recognition-msgs ros-noetic-octomap-msgs ros-noetic-camera-info-manager ros-noetic-control-toolbox ros-noetic-polled-camera ros-noetic-controller-manager ros-noetic-transmission-interface ros-noetic-joint-limits-interface git clone https://github.com/PX4/PX4-Autopilot.git PX4_Firmware cd PX4_Firmware git checkout -b xtdrone/dev v1.13.2 git submodule update --init --recursive make px4_sitl_default gazebo
make px4_sitl_default gazebo可以成功运行