
阅读量:1
目录
1.原理简介
1.1PWM控制原理
使用STM32F103ZET6单片机输出2路PWM波(方波),通过L298N驱动芯片放大后输入GM37直流减速电机中,实现对电机的PWM调速、正反转。
1.1.1 电机
(1)选型:直流减速电机——GM37直流减速电机
(2)接线:
红色、黑色线:PWM输入
绿色、蓝色线:编码器电源
黄色、白色线:编码器输出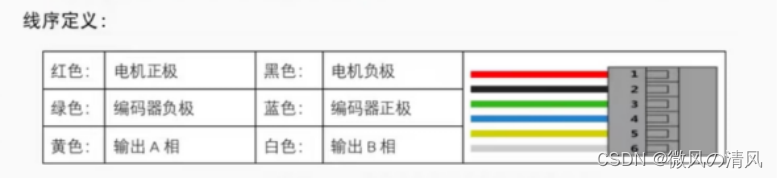
1.1.2 电机驱动
(1)选型:L298N
(2)接线: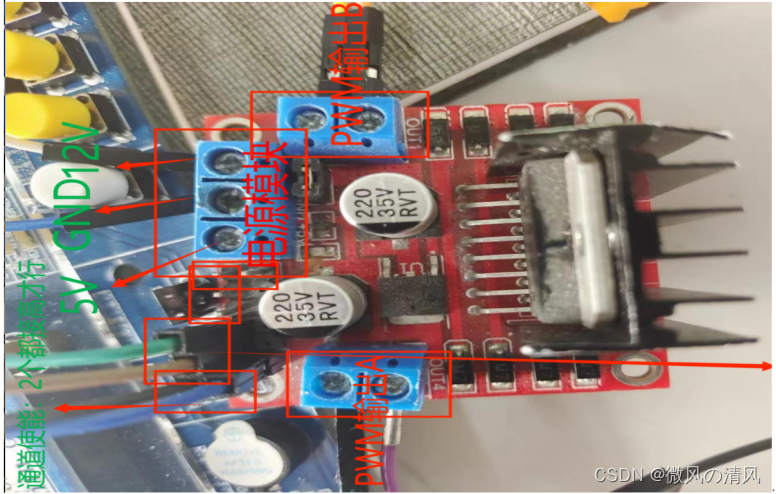
2.硬件设计
2.1 PWM电机控制电路接线图

2.2 PWM电机控制电路原理图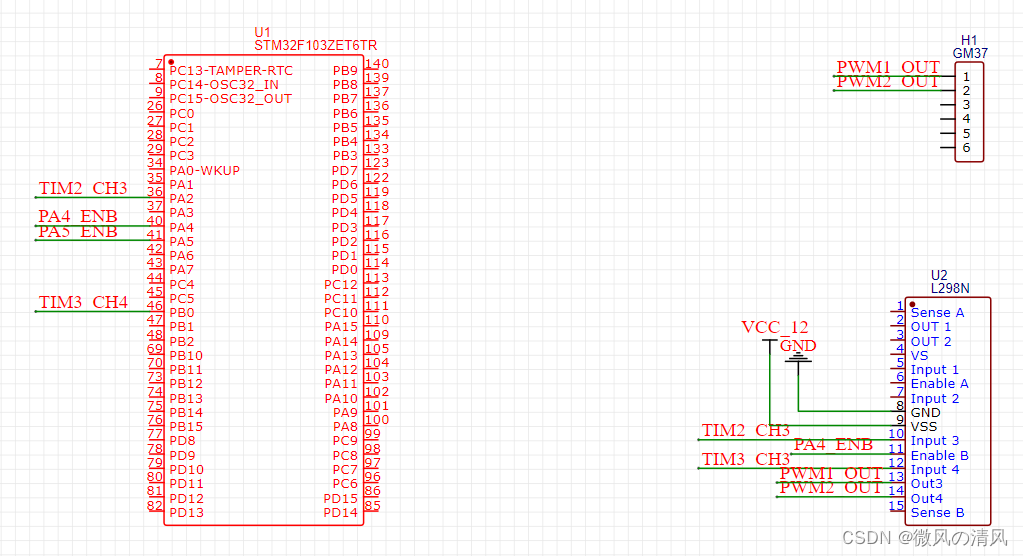
3.软件设计
3.1 PWM.c
1.#include "PWM.h" 2.// ----------------------------1.初始化PWM-------------------------------------- 3./* ---------------------------------函数声明------------------------------------- 4.*函数名称:TIM3_CH2_PWM_Iint(u16 per, u16 psc) 5.*输入参数:u16 per:自动重装载值;u16 psc:预分频系数 6.*返回参数:无 7.*功 能:初始化PWM,使用TIM3的通道2输出PWM 8.*作 者:lph 9.*日 期:2024/03/27 10.------------------------------------------------------------------------------ */ 11.void TIM2_CH3_PWM_Iint(u16 per, u16 psc) 12.{ 13. //1.1使能定时器及端口时钟 14. RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); 15. RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); 16. RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); 17. 18. //1.2初始化GPIO 19. GPIO_InitTypeDef GPIO_InitStruct; 20. 21. GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; 22. GPIO_InitStruct.GPIO_Pin = GPIO_Pin_2; 23. GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; 24. GPIO_Init(GPIOA, &GPIO_InitStruct); 25. 26. //1.3设置引脚复用器映射 27. GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE); 28. 29. //2.初始化定时器参数,包含自动重装值,分频系数,计数方式等 30. TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; 31. 32. TIM_TimeBaseInitStructure.TIM_Period=per; 33. TIM_TimeBaseInitStructure.TIM_Prescaler=psc; 34. TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; 35. TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; 36. TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); 37. 38. //3.初始化PWM输出参数,包含PWM模式、输出极性,使能等 39. TIM_OCInitTypeDef TIM_OCInitStructure; 40. 41. TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; 42. TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable; 43. TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; //TIM_OCPolarity_Low,TIM_OCPolarity_High 44. TIM_OC3Init(TIM2, &TIM_OCInitStructure); 45. 46. //5.使能TIMx在CCRx上的预装载寄存器 47. TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable); 48. 49. //6.使能 TIMx 在 ARR 上的预装载寄存器允许位 50. TIM_ARRPreloadConfig(TIM2, ENABLE); 51. 52. //4.开启定时器 53. TIM_Cmd(TIM2, ENABLE); 54.} 55.void TIM2_CH4_PWM_Iint(u16 per, u16 psc) 56.{ 57. //1.1使能定时器及端口时钟 58. RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); 59. RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); 60. RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); 61. 62. //1.2初始化GPIO 63. GPIO_InitTypeDef GPIO_InitStruct; 64. 65. GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; 66. GPIO_InitStruct.GPIO_Pin = GPIO_Pin_3; 67. GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; 68. GPIO_Init(GPIOA, &GPIO_InitStruct); 69. 70. //1.3设置引脚复用器映射 71. GPIO_PinRemapConfig(GPIO_PartialRemap2_TIM2, ENABLE); 72. 73. //2.初始化定时器参数,包含自动重装值,分频系数,计数方式等 74. TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; 75. 76. TIM_TimeBaseInitStructure.TIM_Period=per; 77. TIM_TimeBaseInitStructure.TIM_Prescaler=psc; 78. TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; 79. TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; 80. TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); 81. 82. //3.初始化PWM输出参数,包含PWM模式、输出极性,使能等 83. TIM_OCInitTypeDef TIM_OCInitStructure; 84. 85. TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; 86. TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable; 87. TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; //TIM_OCPolarity_Low, TIM_OCPolarity_High 88. TIM_OC4Init(TIM2, &TIM_OCInitStructure); 89. 90. //5.使能TIMx在CCRx上的预装载寄存器 91. TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable); 92. 93. //6.使能 TIMx 在 ARR 上的预装载寄存器允许位 94. TIM_ARRPreloadConfig(TIM2, ENABLE); 95. 96. //4.开启定时器 97. TIM_Cmd(TIM2, ENABLE); 98.} 99.void TIM3_CH3_PWM_Iint(u16 per, u16 psc) 100.{ 101. //1.1使能定时器及端口时钟 102. RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); 103. RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); 104. RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); 105. 106. //1.2初始化GPIO 107. GPIO_InitTypeDef GPIO_InitStruct; 108. 109. GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP; 110. GPIO_InitStruct.GPIO_Pin = GPIO_Pin_0; 111. GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz; 112. GPIO_Init(GPIOB, &GPIO_InitStruct); 113. 114. //1.3设置引脚复用器映射 115. GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); 116. 117. //2.初始化定时器参数,包含自动重装值,分频系数,计数方式等 118. TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; 119. 120. TIM_TimeBaseInitStructure.TIM_Period=per; 121. TIM_TimeBaseInitStructure.TIM_Prescaler=psc; 122. TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; 123. TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; 124. TIM_TimeBaseInit(TIM3, &TIM_TimeBaseInitStructure); 125. 126. //3.初始化PWM输出参数,包含PWM模式、输出极性,使能等 127. TIM_OCInitTypeDef TIM_OCInitStructure; 128. 129. TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; 130. TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable; 131. TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; //TIM_OCPolarity_Low, TIM_OCPolarity_High 132. TIM_OC3Init(TIM3, &TIM_OCInitStructure); 133. 134. //5.使能TIMx在CCRx上的预装载寄存器 135. TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable); 136. 137. //6.使能 TIMx 在 ARR 上的预装载寄存器允许位 138. TIM_ARRPreloadConfig(TIM3, ENABLE); 139. 140. //4.开启定时器 141. TIM_Cmd(TIM3, ENABLE); 142.}3.2 PWM.h
1.#ifndef __PWM_H 2.#define __PWM_H 3.#include "system.h" 4.void TIM2_CH3_PWM_Iint(u16 per, u16 psc); 5.void TIM2_CH4_PWM_Iint(u16 per, u16 psc); 6.void TIM3_CH3_PWM_Iint(u16 per, u16 psc); 7.#endif3.3 direction.c
1.#include "direction.h" 2. 3./* ---------------------------------函数声明------------------------------------- 4.*函数名称:void Direction_Control(void) 5.*输入参数:无 6.*返回参数:无 7.*功 能:电机转动方向控制 8.*作 者:lph 9.*日 期:2024/03/27 10.------------------------------------------------------------------------------ */ 11.void Direction_Iint(void) 12.{ 13. RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); 14. 15. GPIO_InitTypeDef GPIO_InitStructure; 16. 17. GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4; 18. GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; 19. GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 20. GPIO_Init(GPIOA, &GPIO_InitStructure); 21. GPIO_ResetBits(GPIOA, GPIO_Pin_4); 22. 23. GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; 24. GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; 25. GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; 26. GPIO_Init(GPIOA, &GPIO_InitStructure); 27. GPIO_ResetBits(GPIOA,GPIO_Pin_5); 28.} 29. 30.void Direction_Control(u8 mode, u16 compare) 31.{ 32. //L298N输入使能 33. INB_1 = 1; 34. INB_2 = 1; 35. if(mode == 1) //左转 36. { 37. TIM_SetCompare3(TIM2, compare); 38.// TIM_SetCompare4(TIM2, 0); 39. TIM_SetCompare3(TIM3, 0); 40. } 41. else if(mode == 2) //右转 42. { 43. TIM_SetCompare3(TIM2, 0); 44.// TIM_SetCompare4(TIM2, compare); 45. TIM_SetCompare3(TIM3, compare); 46. } 47.}3.4 direction.h
1.#ifndef __direction_H 2.#define __direction_H 3.#include "system.h" 4.#include "PWM.h" 5.// GPIO位带操作 6.#define INB_1 PAout(4) 7.#define INB_2 PAout(5) 8.void Direction_Iint(void); 9.void Direction_Control(u8 mode, u16 compare); 10.#endif3.5 mian.c
1./* Includes ------------------------------------------------------------------*/ 2.#include "stm32f10x.h" 3.#include "system.h" 4.#include "SysTick.h" 5.#include "PWM.h" 6.#include "direction.h" 7. 8./* 主函数main() --------------------------------------------------------------*/ 9.int main() 10.{ 11. // 一.自定义变量 12. 13. // 二.初始化------------------- 14. SysTick_Iint(72); 15. NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); // 中断分组 16. Direction_Iint(); 17. TIM2_CH3_PWM_Iint(65536 - 1, 36 - 1); 18. TIM3_CH3_PWM_Iint(65536 - 1, 36 - 1); 19. while(1) 20. { 21. //电机正反转控制 22. Direction_Control(2, 65536 - 1); 23. } 24.}