
阅读量:1
目录
一、简单介绍
众所周知,普通的机械按键会产生抖动,可以采取硬件上加电容来滤波,也可以考虑用软件来消抖。这里笔者分享一种基于状态机的按键消抖策略,可以实现单击,双击,三击,长按事件的读取。按键时间也可以自己设置。
这种方法需要消耗掉定时器资源,还有额外的RAM支出。
二、模块与接线
笔者使用STM32单片机来实现这一过程,具体型号为STM32F103CBT6,和常见的最小核心板引脚是一样的,只是容量大一些。
外部按键选择的是51单片机的独立按键,原理图如下
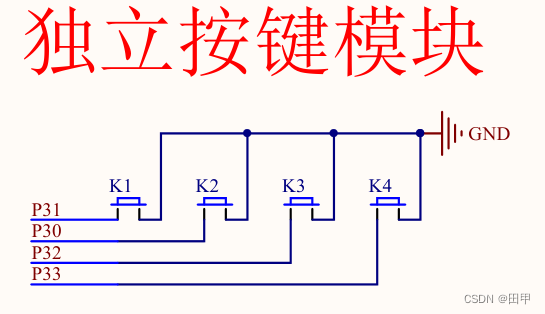
按下按键后,相应的引脚电平就为低。将P30,P31,P32,P33分别连接至单片机的PA1,PA2,PA3,PA4
三、cubemx配置
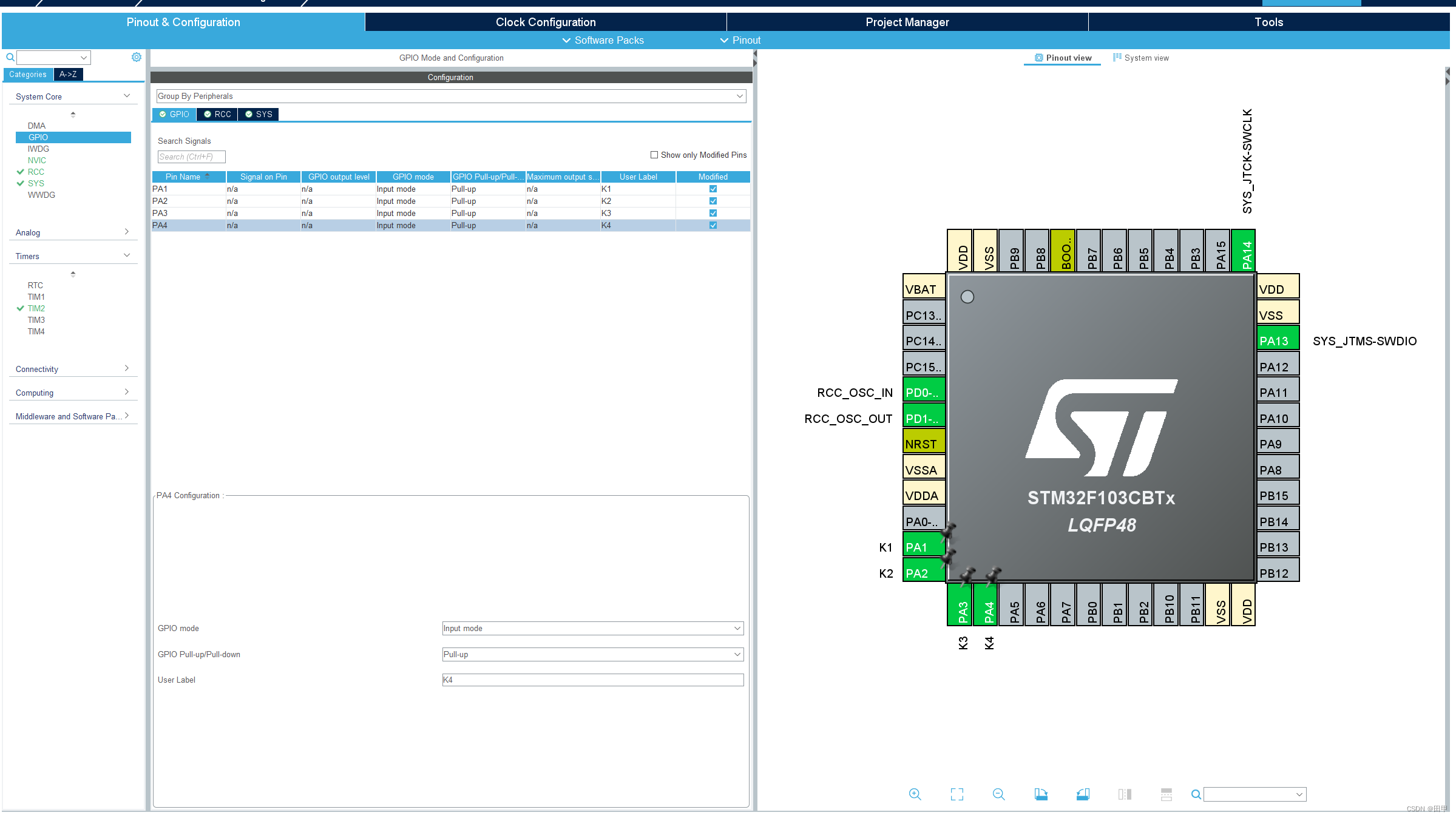
GPIO口开启对应的按键为输入模式,配置上拉
串口
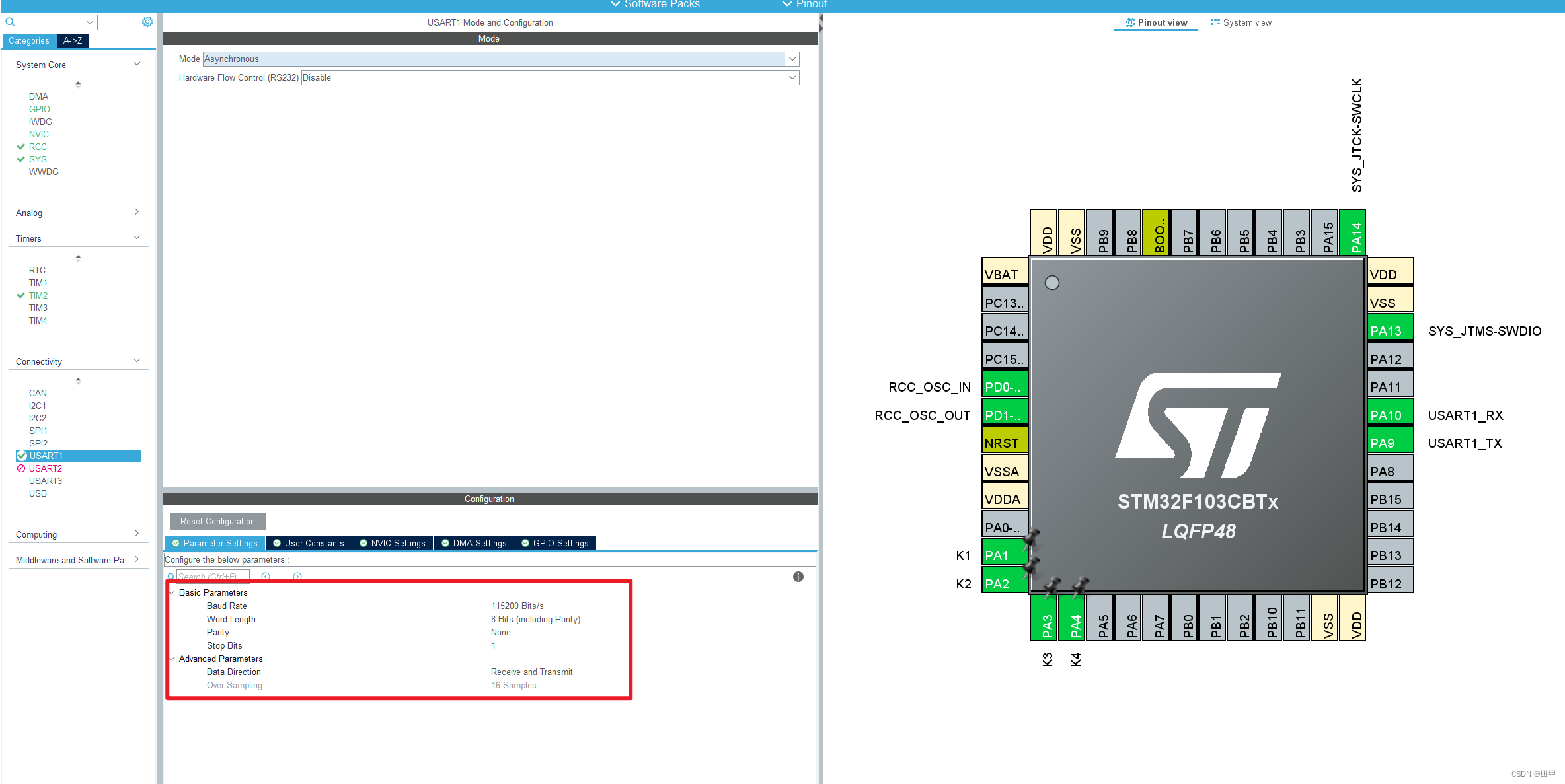
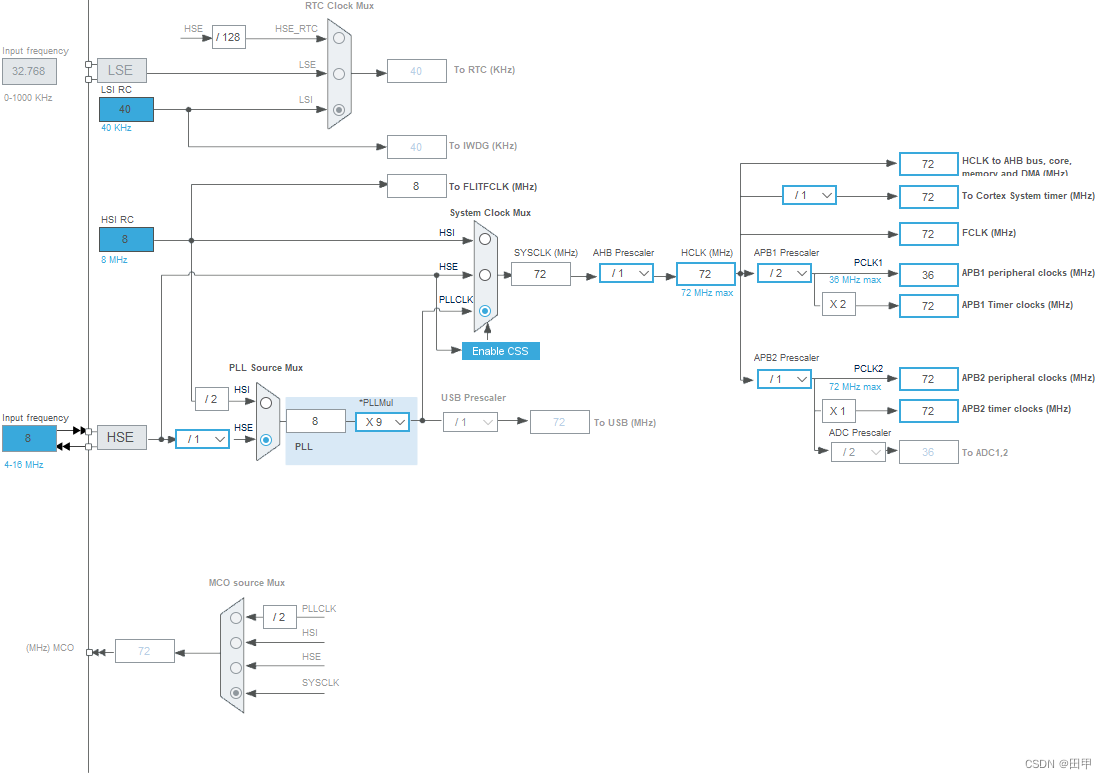
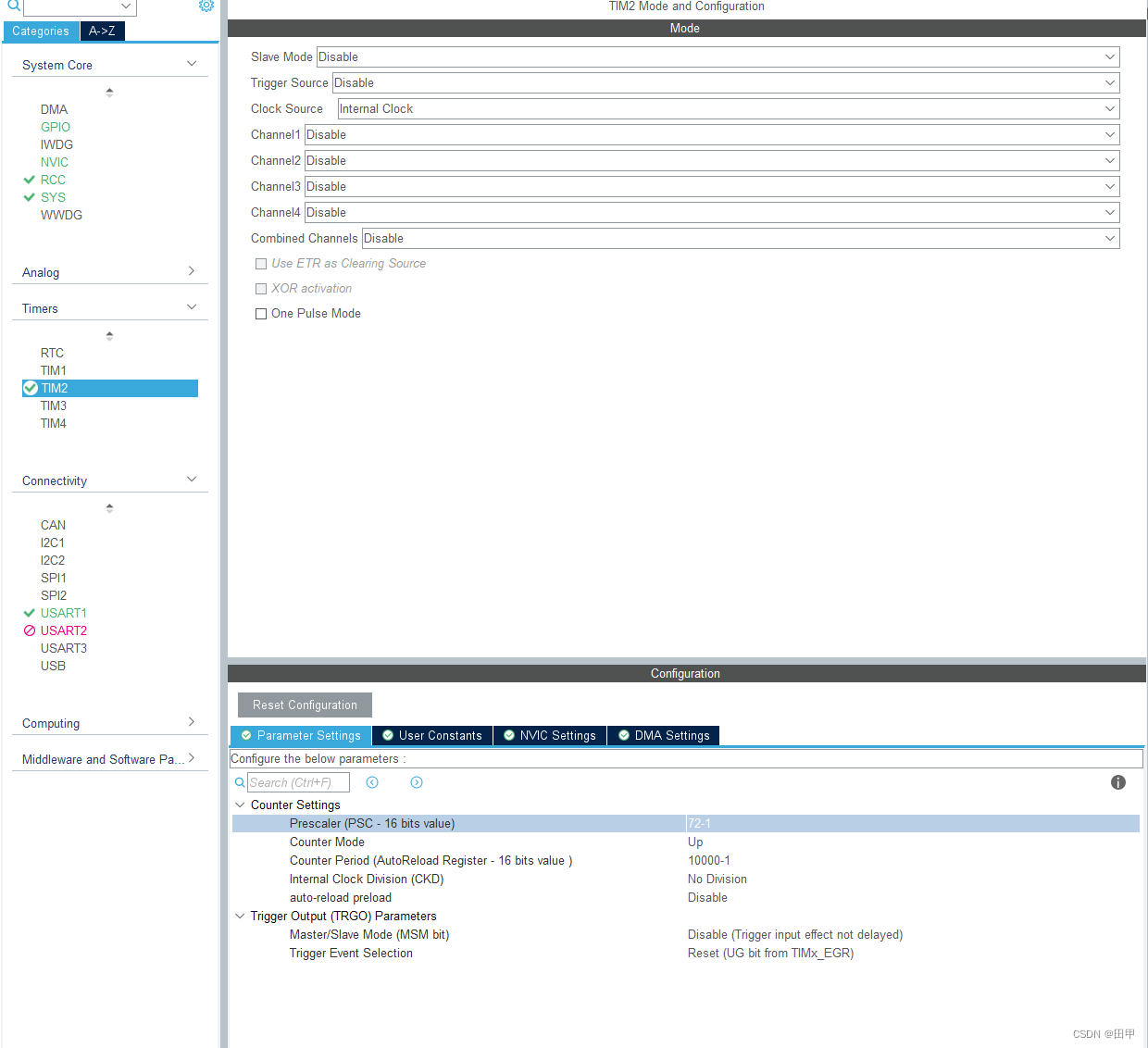
时钟为72MHz
定时器设置为10ms触发一次

四、驱动编写
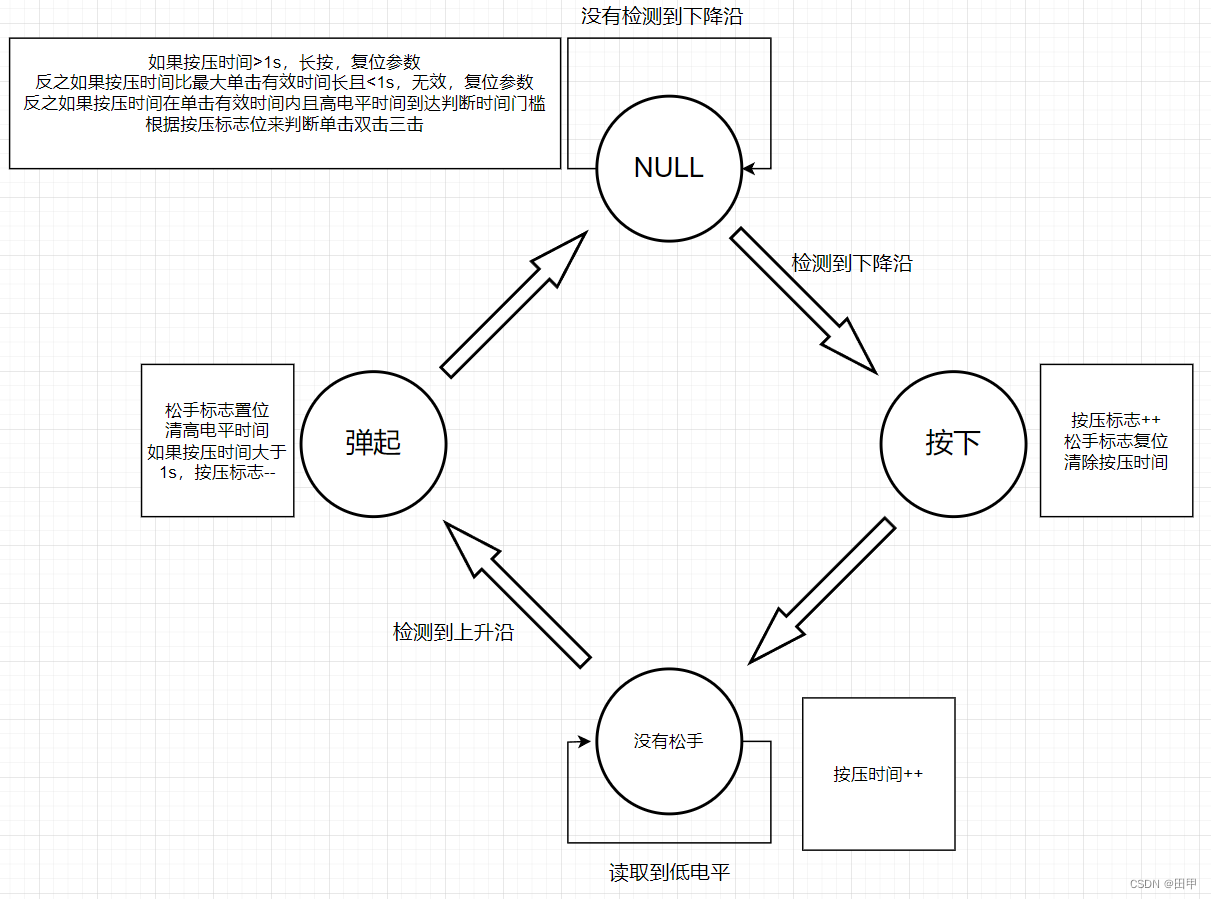
状态图
将一个按键从按下前到按下再到松手分成四个状态:无操作、按下、按压、弹起
对应的状态图如下,分别是四个圆形
按键类型定义
如图矩形框内描述,最终键值的确定需要标志位和计数值,因此一个按键结构体应该这样定义
typedef struct { GPIO_TypeDef * GPIO_Port; //按键端口 uint16_t GPIO_Pin; //按键PIN KeyActionType key; //按键类型 uint16_t hold_cnt; //按压计数器 uint16_t high_cnt; //高电平计数器 uint8_t press_flag; //按压标志 uint8_t release_flag; //松手标志 ButtonActionType buttonAction; //按键键值 }buttonType;该工程需要配置的只有一个主函数文件,外加笔者编写的key.c和key.h还有串口重定向的部分
参数初始化/复位
void Key_ParaInit(buttonType* button) { button->high_cnt = 0; button->hold_cnt = 0; button->press_flag = 0; button->release_flag = 0; }按键扫描
代码如下,基本实现了状态图
void Key_Scan(buttonType* button) { switch(button->key) { case KEY_NULL: { /* if falling edge captured */ if(HAL_GPIO_ReadPin(button->GPIO_Port,button->GPIO_Pin) == 0) { button->key = KEY_DOWN; } else if(HAL_GPIO_ReadPin(button->GPIO_Port,button->GPIO_Pin) == 1) { button->key = KEY_NULL; } /* if button is released ,high_time_count++ */ if(button->release_flag == 1) { button->high_cnt++; } /**********************judge***********************/ /* if high_time_count is longer than LONG_PRESS_TIME, consider BUTTON_LONG_PRESS */ if(button->hold_cnt > LONG_PRESS_TIME) { button->buttonAction = BUTTON_LONG_PRESS; Key_ParaInit(button); } /* if high_time_count is shorter than LONG_PRESS_TIME,but longer than CLICK_MAX_TIME consider INVALID */ else if(button->hold_cnt < LONG_PRESS_TIME && button->hold_cnt > CLICK_MAX_TIME) { Key_ParaInit(button); } /* only the latest press time is in range of [CLICK_MIN_TIME,CLICK_MAX_TIME] can be regarded valid if high level time > JUDGE_TIME also means that over the JUDGE_TIME and still dont have button pushed we can check the flag value to get button state now */ else if((button->high_cnt > JUDGE_TIME)&&(button->hold_cnt > CLICK_MIN_TIME && button->hold_cnt < CLICK_MAX_TIME)) { if(button->press_flag ==1) { button->buttonAction = BUTTON_SINGLE; } else if(button->press_flag == 2) { button->buttonAction = BUTTON_DOUBLE; } else if(button->press_flag == 3) { button->buttonAction = BUTTON_TRIPLE; } Key_ParaInit(button); } break; } case KEY_DOWN: { button->key = KEY_PRESS; /* as long as falling edge occurring,press_flag++ */ button->press_flag++; button->release_flag = 0; /* means that the button has been pressed */ button->hold_cnt = 0; /* reset hold time count */ break; } case KEY_PRESS: { /* when button was kept pressed, hold count++ */ if(HAL_GPIO_ReadPin(button->GPIO_Port,button->GPIO_Pin) == 0) { button->key = KEY_PRESS; button->hold_cnt++; } /* when button was released, change state */ else if(HAL_GPIO_ReadPin(button->GPIO_Port,button->GPIO_Pin) == 1) { button->key = KEY_UP; } break; } case KEY_UP: { button->key = KEY_NULL; button->release_flag = 1; /* means that the button is released */ button->high_cnt = 0; /* reset hold time count */ /* if press time is longer than 1s then press_flag-- */ if(button->hold_cnt > 100) { button->press_flag--; } break; } default: break; } }里面涉及到的宏定义和枚举,都在头文件内给出
/* double click: ```___________``````````````___________```````````` min< <max <judge min< <max >judge single click: ``````___________````````` min< <max >judge */ #define LONG_PRESS_TIME 100 #define CLICK_MIN_TIME 5 /* if key press_cnt time less than this -> invalid click */ #define CLICK_MAX_TIME 20 /* if key press_cnt time more than this -> invalid click */ #define JUDGE_TIME 20 /* double click time space */ typedef enum { KEY_NULL, KEY_DOWN, KEY_PRESS, KEY_UP, }KeyActionType; typedef enum { BUTTON_NULL, BUTTON_SINGLE, BUTTON_DOUBLE, BUTTON_TRIPLE, BUTTON_LONG_PRESS, }ButtonActionType;串口重定向
打开usart.c
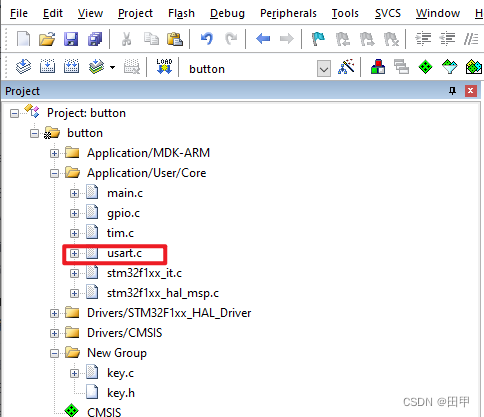
添加如下代码
int fputc(int ch, FILE *f) { HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff); return ch; } int fgetc(FILE *f) { uint8_t ch = 0; HAL_UART_Receive(&huart1, &ch, 1, 0xffff); return ch; } 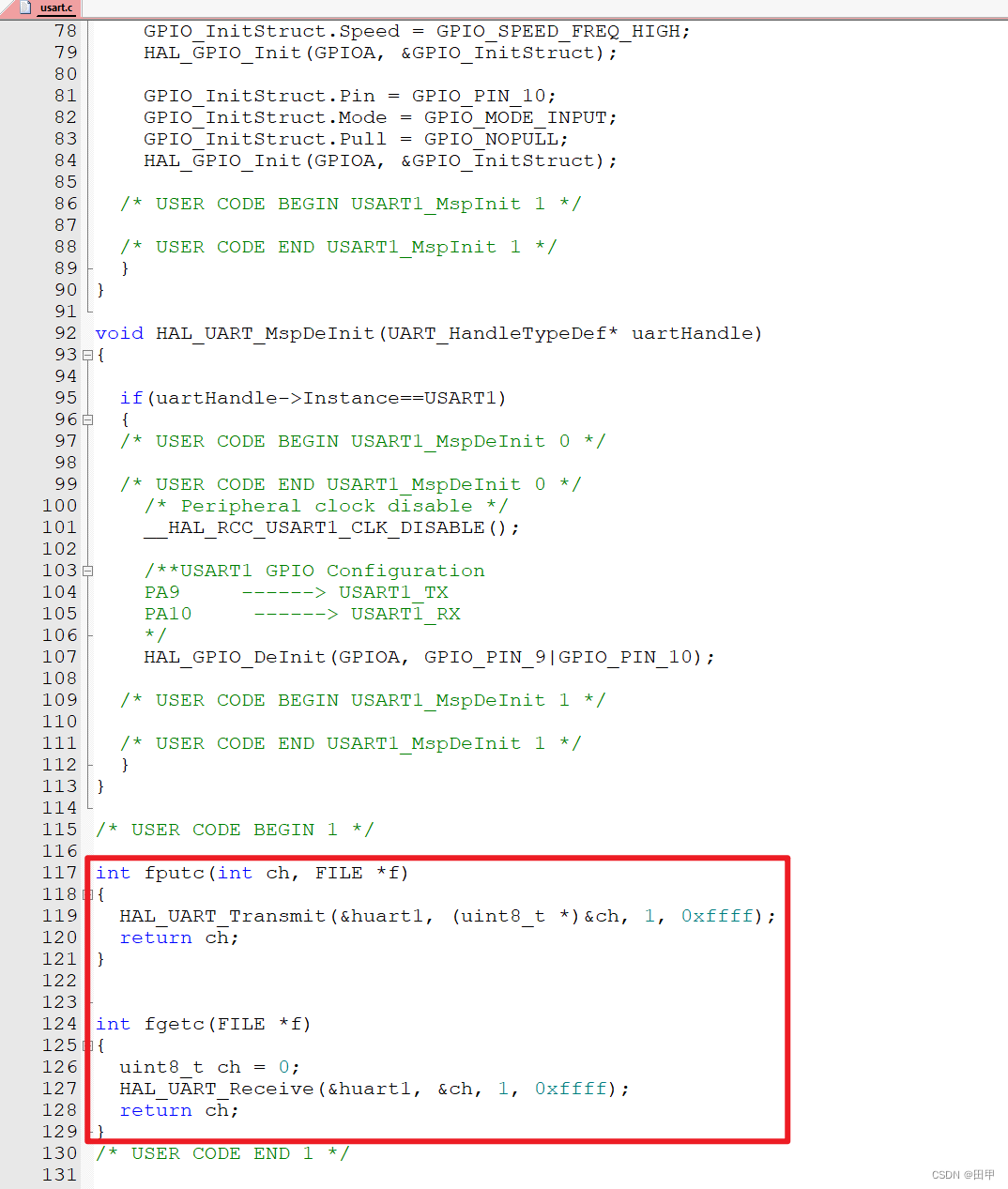
主函数
在主循环内去读取键值,用定时器来周期扫描按键
/* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * Copyright (c) 2024 STMicroelectronics. * All rights reserved. * * This software is licensed under terms that can be found in the LICENSE file * in the root directory of this software component. * If no LICENSE file comes with this software, it is provided AS-IS. * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "tim.h" #include "usart.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ #include "stdio.h" #include "tim.h" #include "key.h" /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); /* USER CODE BEGIN PFP */ /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_TIM2_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ Key_Config(); //配置按键 HAL_TIM_Base_Start_IT(&htim2); //开定时器 /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ Key_Debug(); } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { Error_Handler(); } } /* USER CODE BEGIN 4 */ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if(htim == &htim2) { Key_Scan(button); Key_Scan(button+1); Key_Scan(button+2); Key_Scan(button+3); } } /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ __disable_irq(); while (1) { } /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */ 五、效果展示
按下按键,串口打印相应的按键号和键值

六、驱动附录
key.c
#include "key.h" #include "stdio.h" buttonType button[4]; void Key_Config() { button[0].GPIO_Port = K1_GPIO_Port; button[0].GPIO_Pin = K1_Pin; button[1].GPIO_Port = K2_GPIO_Port; button[1].GPIO_Pin = K2_Pin; button[2].GPIO_Port = K3_GPIO_Port; button[2].GPIO_Pin = K3_Pin; button[3].GPIO_Port = K4_GPIO_Port; button[3].GPIO_Pin = K4_Pin; } void Key_ParaInit(buttonType* button) { button->high_cnt = 0; button->hold_cnt = 0; button->press_flag = 0; button->release_flag = 0; } void Key_Scan(buttonType* button) { switch(button->key) { case KEY_NULL: { /* if falling edge captured */ if(HAL_GPIO_ReadPin(button->GPIO_Port,button->GPIO_Pin) == 0) { button->key = KEY_DOWN; } else if(HAL_GPIO_ReadPin(button->GPIO_Port,button->GPIO_Pin) == 1) { button->key = KEY_NULL; } /* if button is released ,high_time_count++ */ if(button->release_flag == 1) { button->high_cnt++; } /**********************judge***********************/ /* if high_time_count is longer than LONG_PRESS_TIME, consider BUTTON_LONG_PRESS */ if(button->hold_cnt > LONG_PRESS_TIME) { button->buttonAction = BUTTON_LONG_PRESS; Key_ParaInit(button); } /* if high_time_count is shorter than LONG_PRESS_TIME,but longer than CLICK_MAX_TIME consider INVALID */ else if(button->hold_cnt < LONG_PRESS_TIME && button->hold_cnt > CLICK_MAX_TIME) { Key_ParaInit(button); } /* only the latest press time is in range of [CLICK_MIN_TIME,CLICK_MAX_TIME] can be regarded valid if high level time > JUDGE_TIME also means that over the JUDGE_TIME and still dont have button pushed we can check the flag value to get button state now */ else if((button->high_cnt > JUDGE_TIME)&&(button->hold_cnt > CLICK_MIN_TIME && button->hold_cnt < CLICK_MAX_TIME)) { if(button->press_flag ==1) { button->buttonAction = BUTTON_SINGLE; } else if(button->press_flag == 2) { button->buttonAction = BUTTON_DOUBLE; } else if(button->press_flag == 3) { button->buttonAction = BUTTON_TRIPLE; } Key_ParaInit(button); } break; } case KEY_DOWN: { button->key = KEY_PRESS; /* as long as falling edge occurring,press_flag++ */ button->press_flag++; button->release_flag = 0; /* means that the button has been pressed */ button->hold_cnt = 0; /* reset hold time count */ break; } case KEY_PRESS: { /* when button was kept pressed, hold count++ */ if(HAL_GPIO_ReadPin(button->GPIO_Port,button->GPIO_Pin) == 0) { button->key = KEY_PRESS; button->hold_cnt++; } /* when button was released, change state */ else if(HAL_GPIO_ReadPin(button->GPIO_Port,button->GPIO_Pin) == 1) { button->key = KEY_UP; } break; } case KEY_UP: { button->key = KEY_NULL; button->release_flag = 1; /* means that the button is released */ button->high_cnt = 0; /* reset hold time count */ /* if press time is longer than 1s then press_flag-- */ if(button->hold_cnt > 100) { button->press_flag--; } break; } default: break; } } void Key_Debug() { for(uint8_t i=0;i<4;i++) { switch(button[i].buttonAction) { case BUTTON_SINGLE: { button[i].buttonAction = BUTTON_NULL; printf("%d->",i); printf("BUTTON_SINGLE\r\n"); break; } case BUTTON_LONG_PRESS: { button[i].buttonAction = BUTTON_NULL; printf("%d->",i); printf("BUTTON_LONG_PRESS\r\n"); break; } case BUTTON_DOUBLE: { button[i].buttonAction = BUTTON_NULL; printf("%d->",i); printf("BUTTON_DOUBLE\r\n"); break; } case BUTTON_TRIPLE: { button[i].buttonAction = BUTTON_NULL; printf("%d->",i); printf("BUTTON_TRIPLE\r\n"); break; } case BUTTON_NULL: { button[i].buttonAction = BUTTON_NULL; break; } default: { break; } } } }key.h
#ifndef KEY_H #define KEY_H #include "tim.h" #include "main.h" /* double click: ```___________``````````````___________```````````` min< <max <judge min< <max >judge single click: ``````___________````````` min< <max >judge */ #define LONG_PRESS_TIME 100 #define CLICK_MIN_TIME 5 /* if key press_cnt time less than this -> invalid click */ #define CLICK_MAX_TIME 20 /* if key press_cnt time more than this -> invalid click */ #define JUDGE_TIME 20 /* double click time space */ typedef enum { KEY_NULL, KEY_DOWN, KEY_PRESS, KEY_UP, }KeyActionType; typedef enum { BUTTON_NULL, BUTTON_SINGLE, BUTTON_DOUBLE, BUTTON_TRIPLE, BUTTON_LONG_PRESS, }ButtonActionType; typedef struct { GPIO_TypeDef * GPIO_Port; //按键端口 uint16_t GPIO_Pin; //按键PIN KeyActionType key; //按键类型 uint16_t hold_cnt; //按压计数器 uint16_t high_cnt; //高电平计数器 uint8_t press_flag; //按压标志 uint8_t release_flag; //松手标志 ButtonActionType buttonAction; //按键键值 }buttonType; extern buttonType button[4]; void Key_Scan(buttonType*); void Key_Debug(); void Key_Config(); #endif