
阅读量:2
文章目录
摘要
在电机控制,PWM整流器,逆变器中都需要单片机输出SPWM波去控制.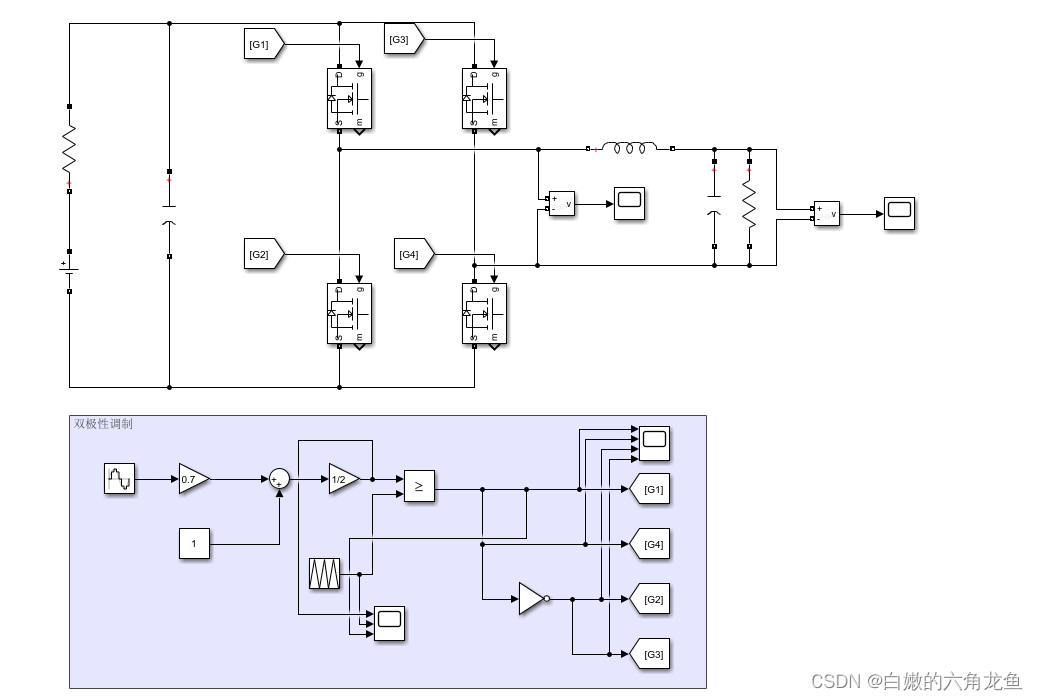
图0
调制分类
对于单相整流,逆变器有双极性调制,单极性调制,单极性倍频调制。
双极性调制
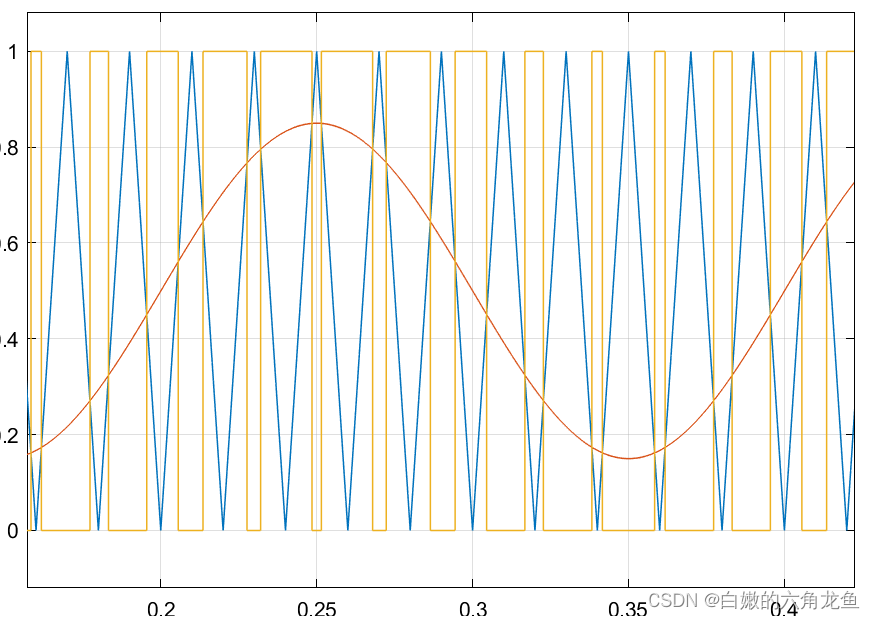
图1
直接将整个正弦波放在三角波里做比较。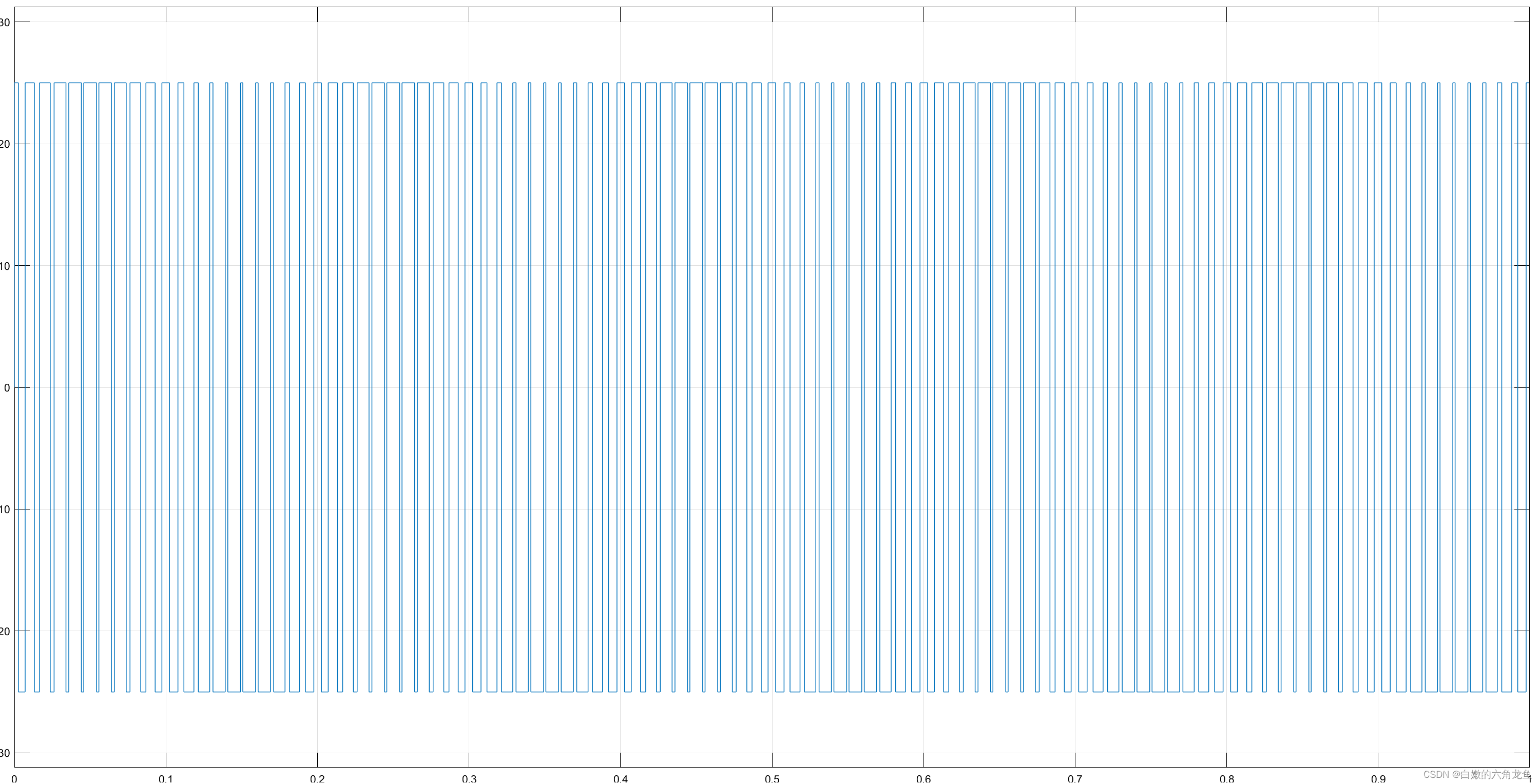
图2
全桥输出波形(占空比按正弦幅值变化).这个波经过LC滤波后就变成正弦波了。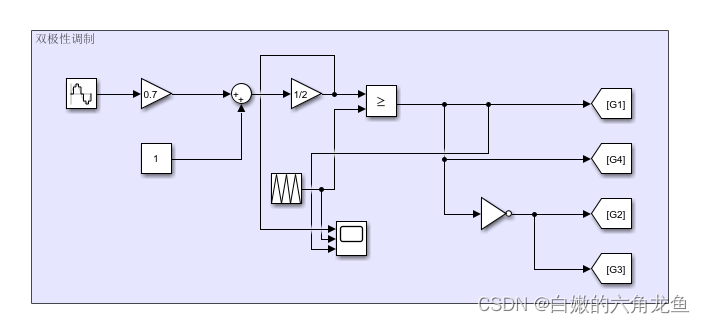
图3
matlab里搭出的双极性调制,后面写代码也是参考这个。
0.7是调制度。前面输进去的正弦波是从-1到0再到1的正弦波。将其抬高1,整个波形就只有正的,然后再除2就成了图1中的正弦波(归一化让正弦波在0到1内)。与三角波比较后输出调制波。
单极性调制
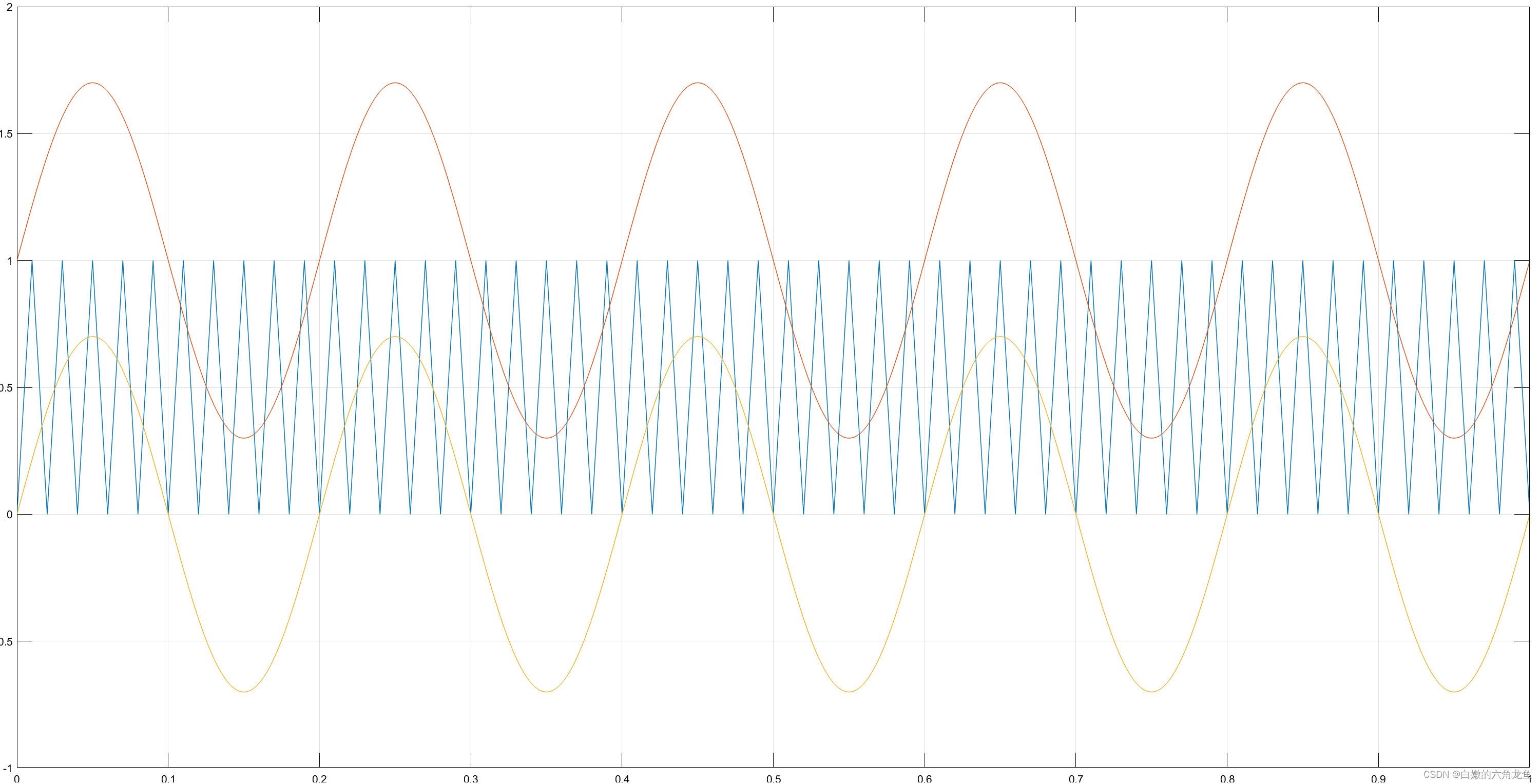
图4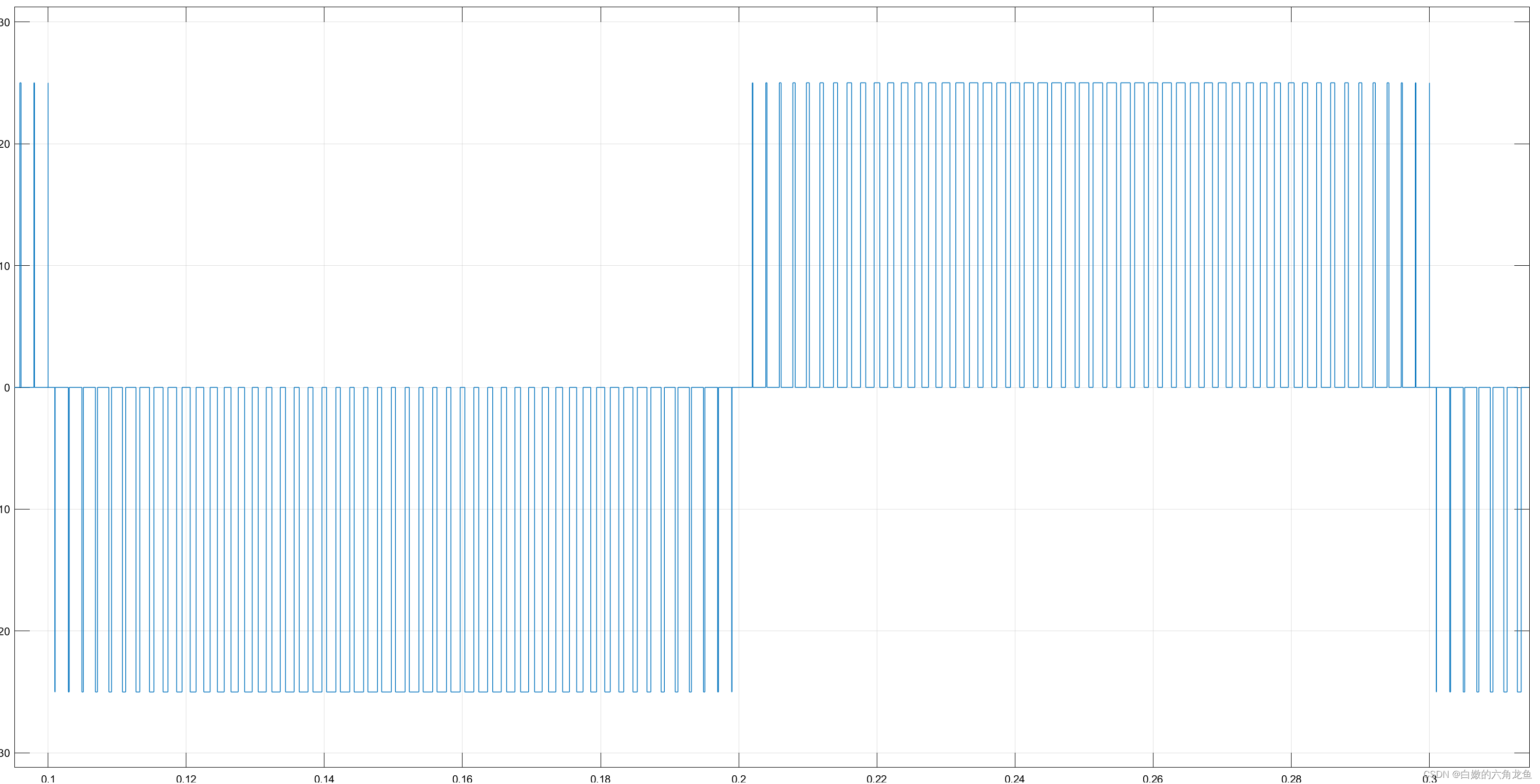
图5
与双极性不同,单极性调制的输出是有正有负的。可以看到,这个波要比双极性调制更接近正弦波,所以谐波含量更少。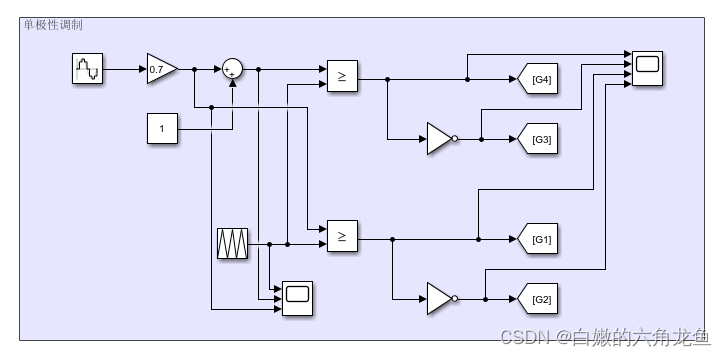
图6
按这种方式调制,那么全桥两边都是一会为高频开关一会为低频开关。而我们也可以只让一边做高频侧,另一边做低频侧(负责波形的正负)。
单极性倍频
两半桥输出20K(比如)PWM,相减后得到40KPWM完成成倍频。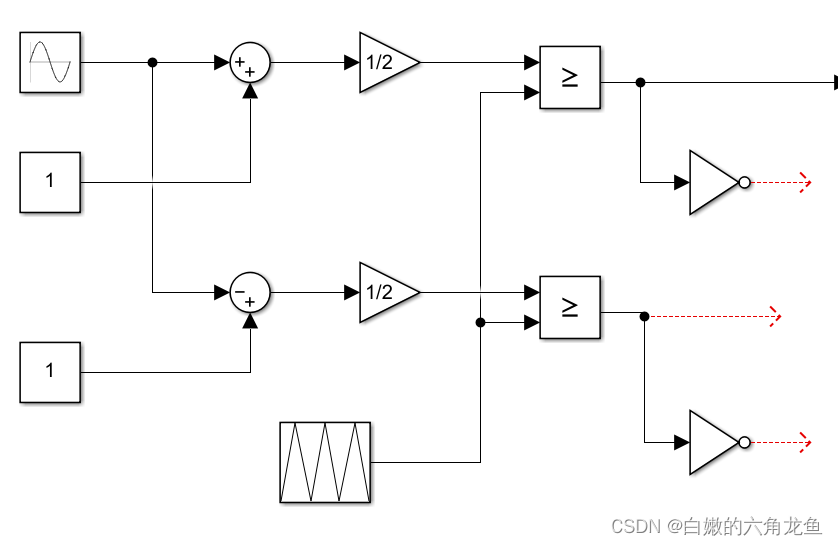
/** * @brief 单极性倍频调制 * * @param insignal 输入基波 * @param cnt 当时定时器cnt值 * @return unsigned int */ void unimp_modulation(float insignal, unsigned short cnt, spwm_t *ccr) { ccr->ch1_ccr = (1+insignal)/2 * (cnt-1); ccr->ch2_ccr = (1-insignal)/2 * (cnt-1); } 可以把调制简单的理解成,将正弦波与三角波混合。后面经过滤波器就能去除三角波得到正弦波。那么三角波(载波)其实不一定就是上面那种等腰三角形,你用只有一半的波也是可以的。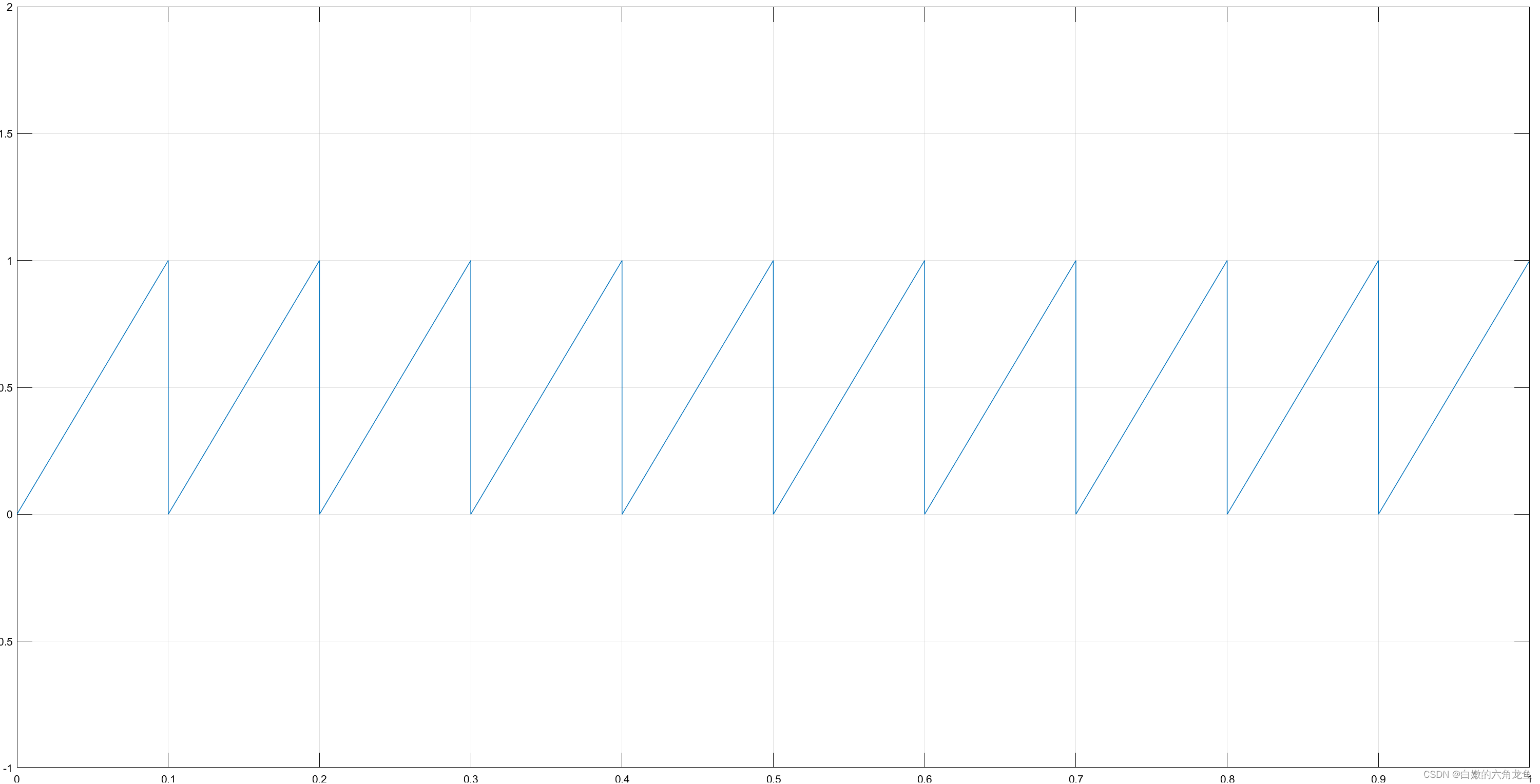
图7
后面加滤波器就能把这个半个的三角波滤去。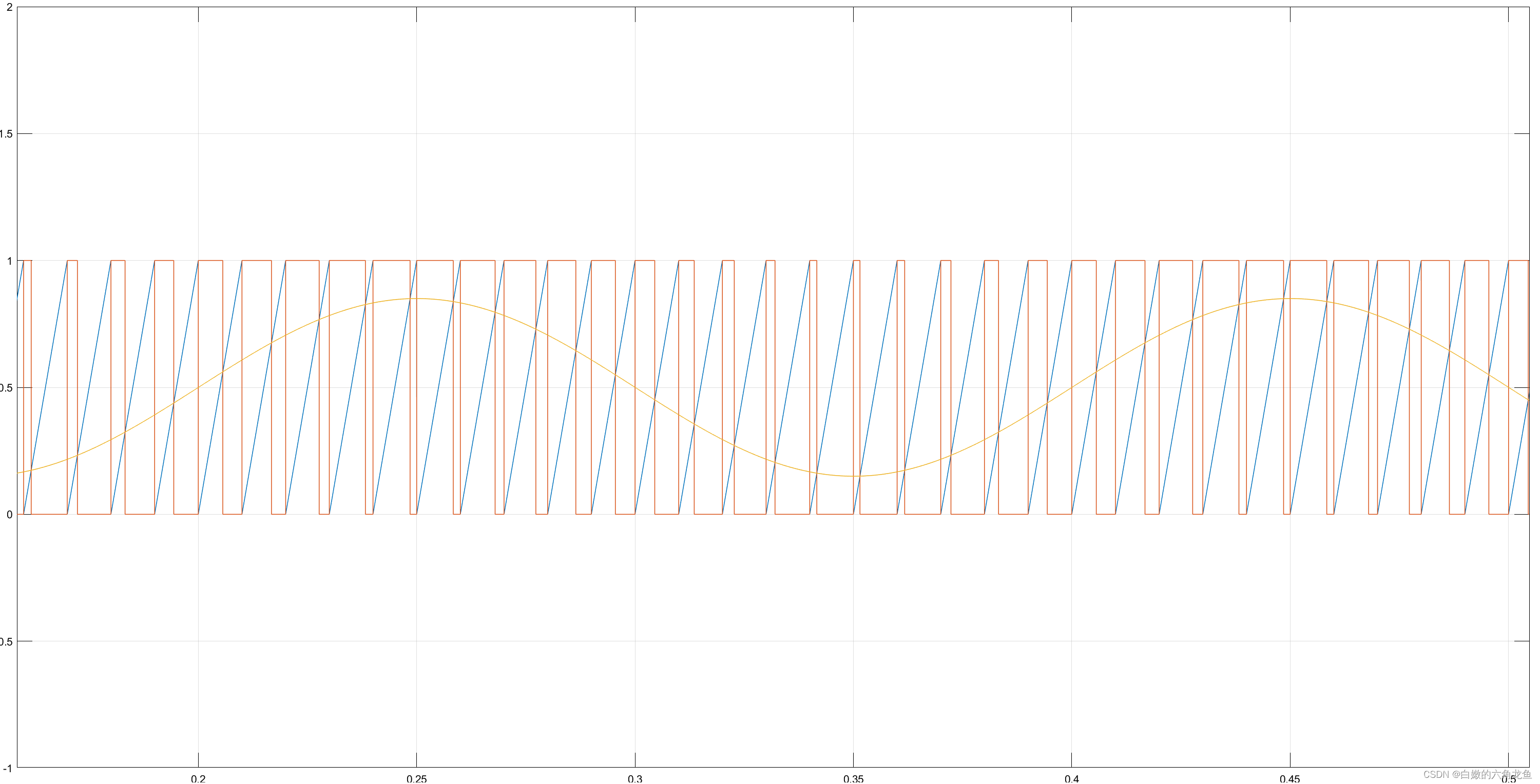
图8
STM32上实现spwm调制
可以看出,调制的核心是利用高频载波(三角波)与低频基波(正弦波)作比较得出。那么在stm上怎么实现这个过程?或者说在STM32里三角波和正弦波分别是什么,从哪里来?
stm32的pwm输出功能(中心对称计数)可以用下图形象的描述。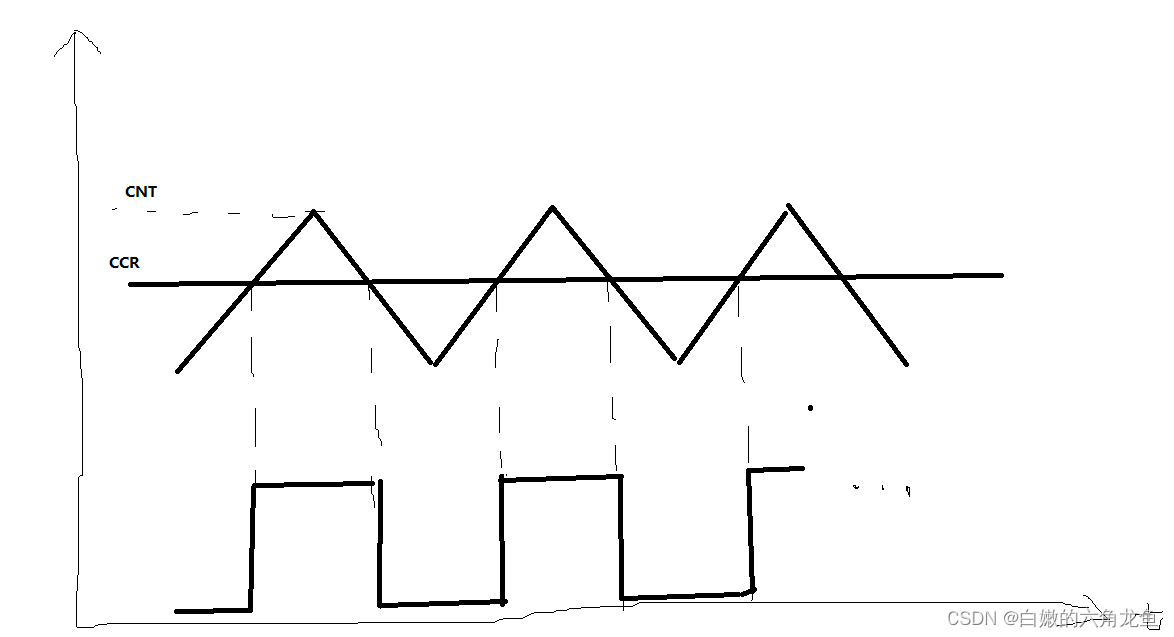
图9
三角波是定时器计数值按时间的变化,方波是输出的PWM波。
可以看出改变CCR就可以改变脉冲宽度。即CCR/CNT=占空比。(当然在另一个PWM模式里就与这里的相反了)
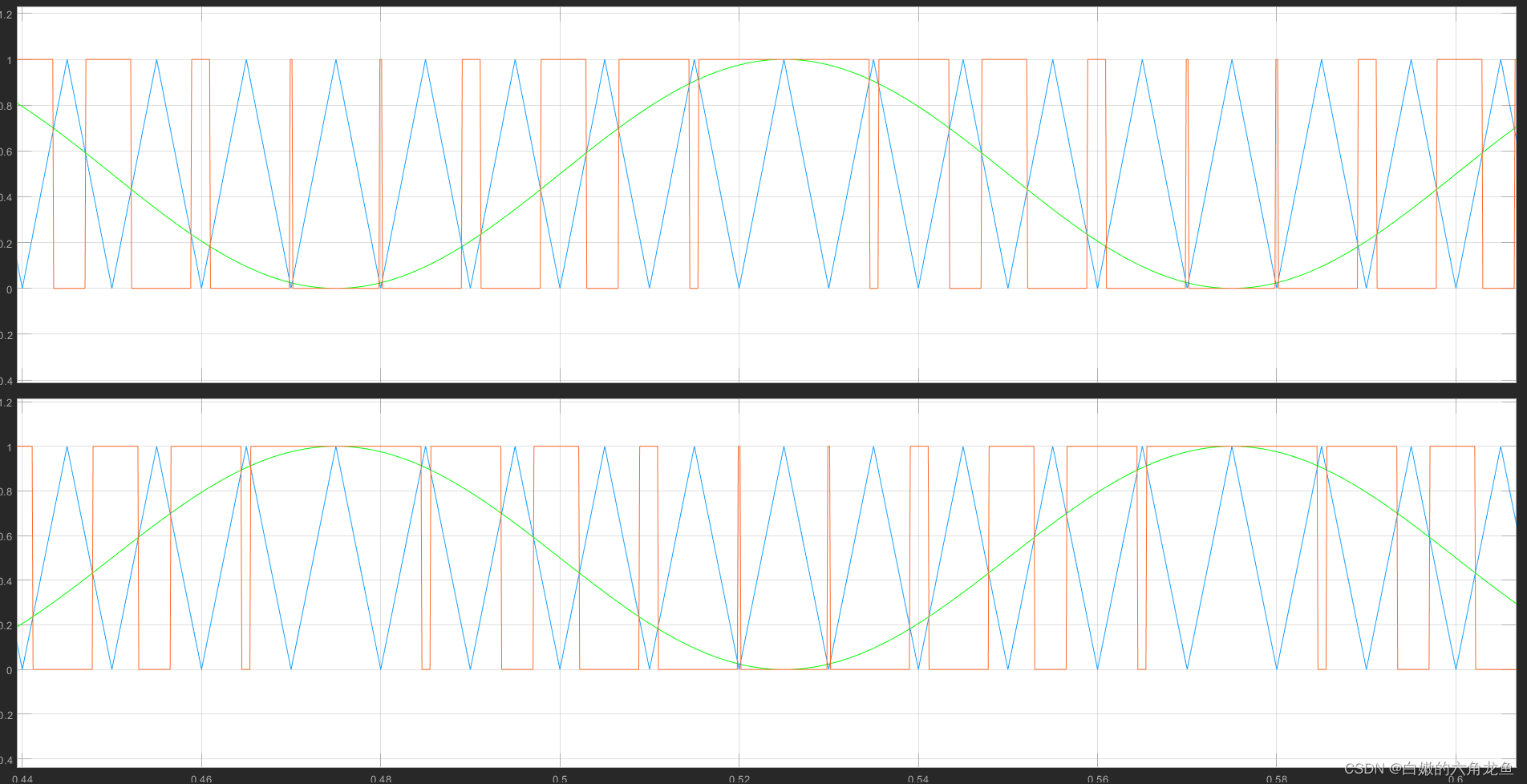
图10
(实际的三角波频率要比正弦波大很多,看不清楚,这里减小了三角波的频率为了看清比较过程。)
联系上面两张图,其实就是在每次到达CCR做比较来改变脉冲宽度。那么当CCR值按正弦变化不就实现了SPWM调制了嘛。
正弦波的获取
好了,我们现在知道了。定时器的计数值就是三角波。正弦波就是按正弦变化的CCR值。
比如我们要一个50HZ的正弦波,三角波频率20KHZ。可以知道一个正弦波里包含400个三角波,而一个三角波要与正弦波比较两次,所以我们需要800个CCR值。当然,我们不追求精度,可以让一个三角波的两次比较值都一样,也就是400个CCR值。甚至可以两次三角波的比较CCR都一样,这样就只需要200个CCR了,当然这么做会损失一些精度。最好的情况当然是三角波频率足够高,比较值也足够多。
常见的CCR获取方式有下面的两种。
查表法(空间换时间)
早期的单片机由于运算性能不行,所以是先把这些CCR值存储在ROM里(RAM也行)做正弦波码表。然后这个码表可以在一些软件里生成。也可以自己提前算好。
有了码表,我们只需要每次计数器计到CCR触发中断时把CCR值更新就行了。
定时器中断运算
使用码表是因为运算性能不够,而stm32运算性能足够(使用dsp库,用C库的函数还是算起来有些慢的),可以自己去算正弦值。大致思路就是开一个定时器,每次进定时器中断的时间相同,累加就能得到时间.然后在定时器中断里计算sin(wt)
具体操作如下:
- 定义角频率
spwm_struct.w = 2*pi*50; //50HZ正弦波 - 确定每次进入定时器中断的时间间隔
spwm_struct.T = 0.00005; //20K的定时器中断,每次进入间隔50us - 更新正弦值,注意这里是用了dsp库的sin(实测F446 180M主频下运算只要400ns,而math.h的sin要算16us)
spwm_struct.uref = A*arm_sin_f32(spwm_struct.WT); //A是幅值 - 在定时器中断里更新角度(相位)
spwm_struct.WT += spwm_struct.w * spwm_struct.T; if(spwm_struct.WT >= 2 * pi) spwm_struct.WT = 0; //WT在0到2pi变化 - 更新CCR
以双极性调制为例,参考图三 CCR=(spwm_struct.uref + 1)*mod_dep/2 * CNT
mod_dep是调制度.
实践
单片机:STM32F446RCT6
栅极驱动:IR2104。
一个2104高端接G1,低端接G2 另一个高端接G3,低端接G4
调制方式:双极性,定时器中断计算正弦波(查表实现的文章很多,这里就不展示了)
大致思路:用高级定时器输出PWM给一个2104去控制G1,G2(PWM信号与G1信号一样,2104会互补输出G2的信号)。G1和G3的信号又是互补的。所以生成互补PWM给另一个2104。
定时器中断频率20Khz,周期0.00005s.
CUBEMX配置
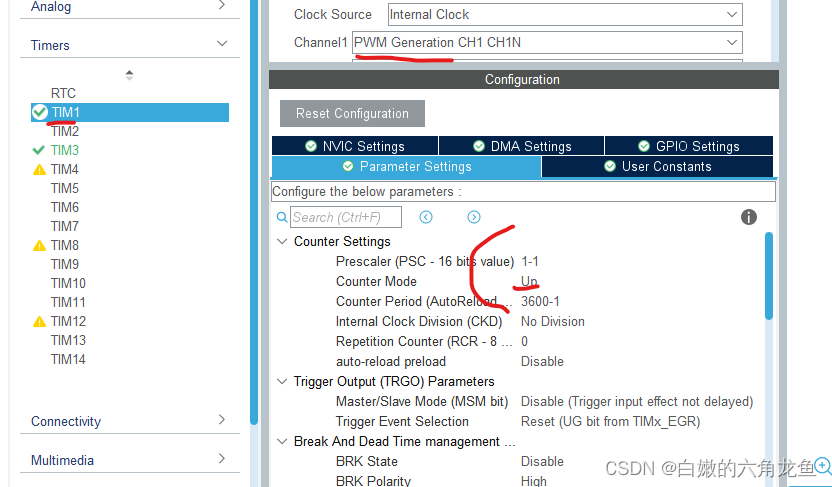
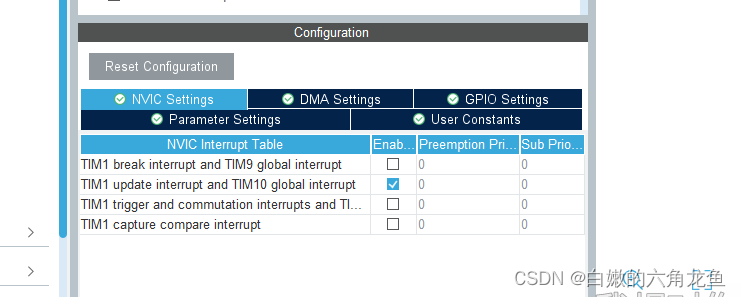
定时器其他配置默认。
至于其他配置(下载,时钟等),就不展示了。
代码
定时器中断
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if(htim->Instance==TIM1) { spwm_struct.jibo = spwm_struct.mod_dep*arm_cos_f32(spwm_struct.wt);//更新正弦波数据 bipolar_modulation(spwm_struct.jibo, tim_cnt, &spwm_struct); TIM1->CCR1 = spwm_struct.ch1_ccr; spwm_struct.wt += spwm_struct.w * spwm_struct.T;//更新相角wt if(spwm_struct.wt>=2*pi) spwm_struct.wt=0;//计满2π后归零,防止溢出 } } 双极性调制
/** * @brief 双极性调制 * * @param insignal 输入基波 (-1到1变化) * @param cnt 当时定时器cnt值 * @return unsigned int */ void bipolar_modulation(float insignal, unsigned short cnt, spwm_t *ccr) { insignal = (insignal+1) / 2; ccr->ch1_ccr = insignal * (cnt - 1); } 主函数while1前放的初始化
void spwm_init() { /*参数初始化*/ spwm_struct.w = 2*pi*50; //2*pi*f spwm_struct.wt = 0; spwm_struct.fre = 50; spwm_struct.uref = 1; spwm_struct.rqd_flag = 1; spwm_struct.mod_dep = 0.5; //调制度 spwm_struct.T = 0.00005; /*2104使能*/ HAL_GPIO_WritePin(GPIOB,GPIO_PIN_5,GPIO_PIN_SET); /*PWM输出开启*/ HAL_TIM_Base_Start_IT(&htim1); HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); HAL_TIMEx_PWMN_Start(&htim1, TIM_CHANNEL_1); } spwm结构体
typedef struct { float w; //角频率 float fre; //频率 float wt; //相角 float mod_dep; //调制度 short ch1_ccr; //ccr1 short ch2_ccr; float jibo; float T; //每次进入定时器中断的时间 }spwm_t; 
欢迎加入扣扣交流群,群号:807477521
