阅读量:30
本篇文章旨在记录我电赛期间使用openmv和stm32单片机之间进行串口通信,将openmv识别到的坐标传输给单片机。背景是基于2023年全国大学生电子设计大赛E题:舵机云台追踪识别。
单片机的串口通信原理我便不再详细讲解,下面直接上代码分析。
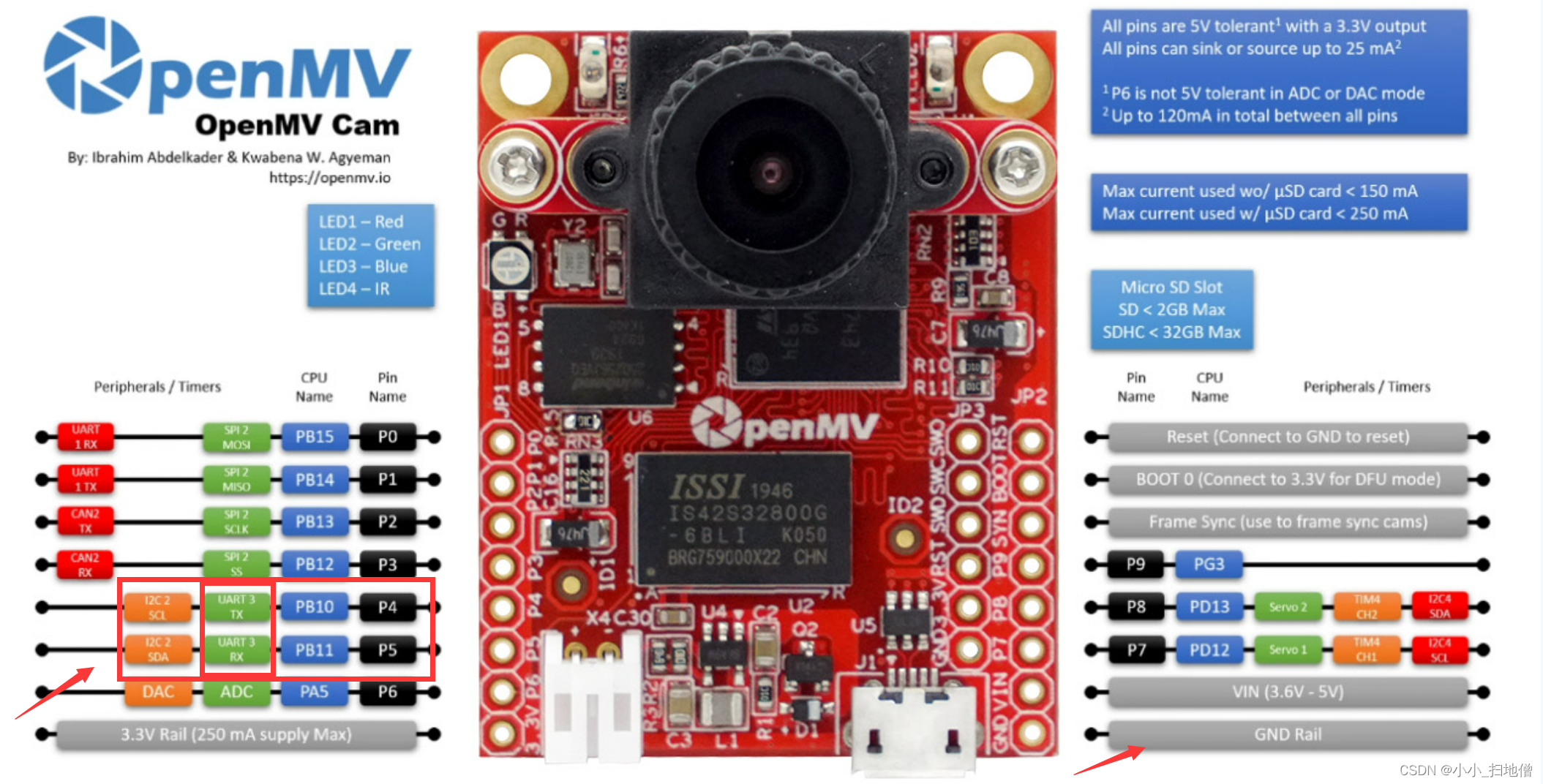
值得注意的是接线:RX——>TX
TX——>RX
单片机和OPENMV必须共地
非常重要!!!!
一、串口通信传输两个数据(x坐标和y坐标)
(一)、 OPENMV串口通信部分
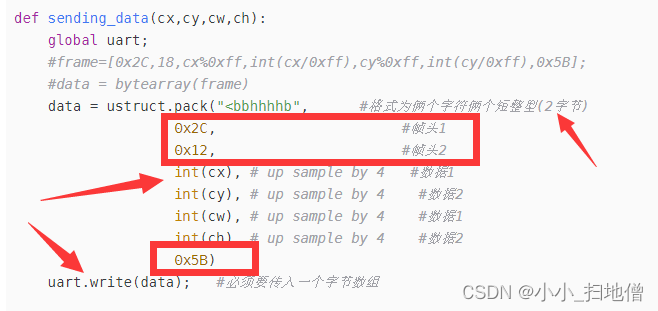
import sensor, image, time,math,pyb from pyb import UART,LED import json import ustruct sensor.reset() sensor.set_pixformat(sensor.RGB565) sensor.set_framesize(sensor.QVGA) sensor.skip_frames(time = 2000) sensor.set_auto_gain(False) # must be turned off for color tracking sensor.set_auto_whitebal(False) # must be turned off for color tracking red_threshold_01=(10, 100, 127, 32, -43, 67) clock = time.clock() uart = UART(3,115200) #定义串口3变量 uart.init(115200, bits=8, parity=None, stop=1) # init with given parameters def find_max(blobs): #定义寻找色块面积最大的函数 max_size=0 for blob in blobs: if blob.pixels() > max_size: max_blob=blob max_size = blob.pixels() return max_blob def sending_data(cx,cy,cw,ch): global uart; #frame=[0x2C,18,cx%0xff,int(cx/0xff),cy%0xff,int(cy/0xff),0x5B]; #data = bytearray(frame) data = ustruct.pack("<bbhhhhb", #格式为俩个字符俩个短整型(2字节) 0x2C, #帧头1 0x12, #帧头2 int(cx), # up sample by 4 #数据1 int(cy), # up sample by 4 #数据2 int(cw), # up sample by 4 #数据1 int(ch), # up sample by 4 #数据2 0x5B) uart.write(data); #必须要传入一个字节数组 while(True): clock.tick() img = sensor.snapshot() blobs = img.find_blobs([red_threshold_01]) max_b = find_max(blobs) cx=0;cy=0; if blobs: #如果找到了目标颜色 cx=max_b[5] cy=max_b[6] cw=max_b[2] ch=max_b[3] img.draw_rectangle(max_b[0:4]) # rect img.draw_cross(max_b[5], max_b[6]) # cx, cy FH = bytearray([0x2C,0x12,cx,cy,cw,ch,0x5B]) #sending_data(cx,cy,cw,ch) uart.write(FH) print(cx,cy,cw,ch) 注意观察下图标注的部分,我不做详细讲解,但是很容易理解:
接下来请看STM32串口通信部分的代码:
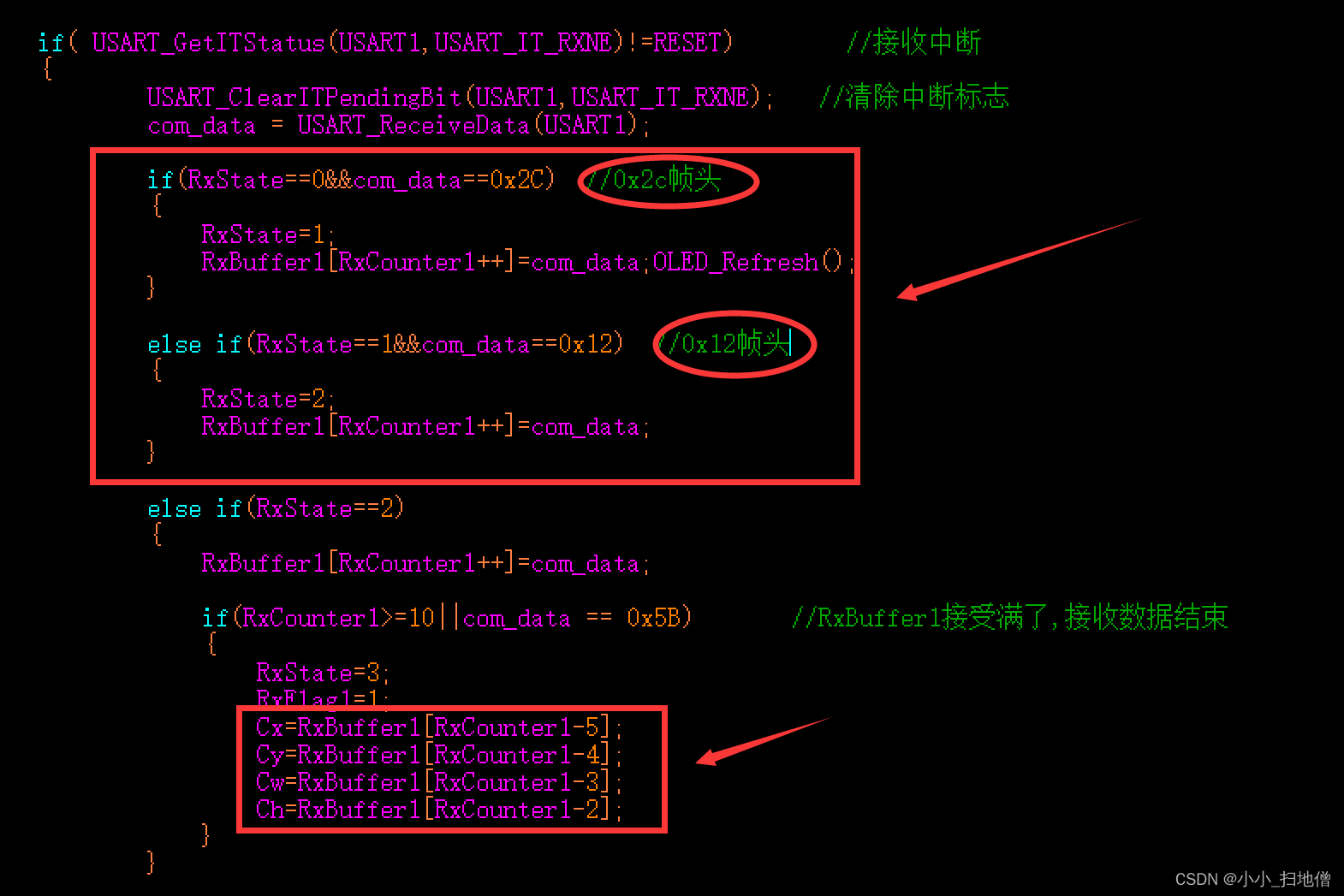
#include "uart.h" #include "oled.h" #include "stdio.h" static u8 Cx=0,Cy=0,Cw=0,Ch=0; void USART1_Init(void) { //USART1_TX:PA 9 //USART1_RX:PA10 GPIO_InitTypeDef GPIO_InitStructure; //串口端口配置结构体变量 USART_InitTypeDef USART_InitStructure; //串口参数配置结构体变量 NVIC_InitTypeDef NVIC_InitStructure; //串口中断配置结构体变量 RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //打开PA端口时钟 //USART1_TX PA9 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; //PA9 GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //设定IO口的输出速度为50MHz GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA9 //USART1_RX PA10 GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; //PA10 GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入 GPIO_Init(GPIOA, &GPIO_InitStructure); //初始化PA10 //USART1 NVIC 配置 NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=0 ; //抢占优先级0 NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //子优先级2 NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能 NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器 //USART 初始化设置 USART_InitStructure.USART_BaudRate = 115200; //串口波特率为115200 USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式 USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位 USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位 USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制 USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式 USART_Init(USART1, &USART_InitStructure); //初始化串口1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //使能中断 USART_Cmd(USART1, ENABLE); //使能串口1 //如下语句解决第1个字节无法正确发送出去的问题 USART_ClearFlag(USART1, USART_FLAG_TC); //清串口1发送标志 } //USART1 全局中断服务函数 void USART1_IRQHandler(void) { u8 com_data; u8 i; static u8 RxCounter1=0; static u16 RxBuffer1[10]={0}; static u8 RxState = 0; static u8 RxFlag1 = 0; if( USART_GetITStatus(USART1,USART_IT_RXNE)!=RESET) //接收中断 { USART_ClearITPendingBit(USART1,USART_IT_RXNE); //清除中断标志 com_data = USART_ReceiveData(USART1); if(RxState==0&&com_data==0x2C) //0x2c帧头 { RxState=1; RxBuffer1[RxCounter1++]=com_data;OLED_Refresh(); } else if(RxState==1&&com_data==0x12) //0x12帧头 { RxState=2; RxBuffer1[RxCounter1++]=com_data; } else if(RxState==2) { RxBuffer1[RxCounter1++]=com_data; if(RxCounter1>=10||com_data == 0x5B) //RxBuffer1接受满了,接收数据结束 { RxState=3; RxFlag1=1; Cx=RxBuffer1[RxCounter1-5]; Cy=RxBuffer1[RxCounter1-4]; Cw=RxBuffer1[RxCounter1-3]; Ch=RxBuffer1[RxCounter1-2]; } } else if(RxState==3) //检测是否接受到结束标志 { if(RxBuffer1[RxCounter1-1] == 0x5B) { USART_ITConfig(USART1,USART_IT_RXNE,DISABLE);//关闭DTSABLE中断 if(RxFlag1) { OLED_Refresh(); OLED_ShowNum(0, 0,Cx,3,16,1); OLED_ShowNum(0,17,Cy,3,16,1); OLED_ShowNum(0,33,Cw,3,16,1); OLED_ShowNum(0,49,Ch,3,16,1); } RxFlag1 = 0; RxCounter1 = 0; RxState = 0; USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); } else //接收错误 { RxState = 0; RxCounter1=0; for(i=0;i<10;i++) { RxBuffer1[i]=0x00; //将存放数据数组清零 } } } else //接收异常 { RxState = 0; RxCounter1=0; for(i=0;i<10;i++) { RxBuffer1[i]=0x00; //将存放数据数组清零 } } } } 注意观察下面的图:
二、串口通信传输多个数据(四个点的x、y坐标同时传输给STM32单片机)
(一)OPENMV串口部分
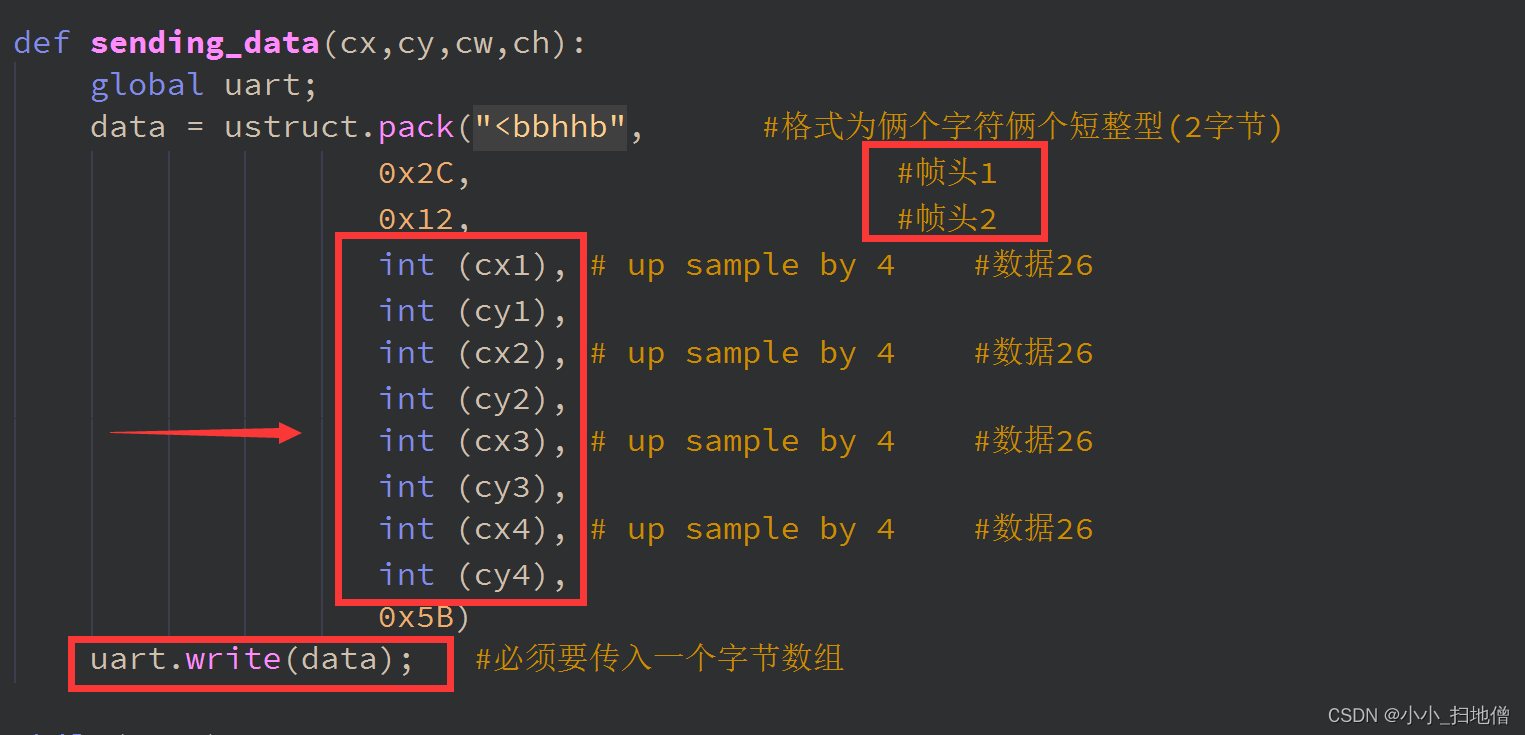
from machine import Pin import sensor, image, time, pyb #import seekfree from pyb import UART # 初始化TFT180屏幕 #lcd = seekfree.LCD180(3) # 初始化摄像头 sensor.reset() sensor.set_pixformat(sensor.RGB565) # 设置图像色彩格式为RGB565格式 sensor.set_framesize(sensor.QQVGA) # 设置图像大小为160*120 sensor.set_auto_whitebal(True) # 设置自动白平衡 sensor.set_brightness(3000) # 设置亮度为3000 sensor.skip_frames(time = 20) # 跳过帧 uart = UART(3, 115200,timeout_char=3000) #配置串口 clock = time.clock() def sending_data(cx,cy,cw,ch): global uart; data = ustruct.pack("<bbhhb", #格式为俩个字符俩个短整型(2字节) 0x2C, #帧头1 0x12, #帧头2 int (cx1), # up sample by 4 #数据26 int (cy1), int (cx2), # up sample by 4 #数据26 int (cy2), int (cx3), # up sample by 4 #数据26 int (cy3), int (cx4), # up sample by 4 #数据26 int (cy4), 0x5B) uart.write(data); #必须要传入一个字节数组 while(True): clock.tick() img = sensor.snapshot() # -----矩形框部分----- # 在图像中寻找矩形 for r in img.find_rects(threshold = 10000): # 判断矩形边长是否符合要求 if r.w() > 20 and r.h() > 20: # 在屏幕上框出矩形 img.draw_rectangle(r.rect(), color = (255, 0, 0), scale = 4) # 获取矩形角点位置 corner = r.corners() # 在屏幕上圈出矩形角点 img.draw_circle(corner[0][0], corner[0][1], 5, color = (0, 0, 255), thickness = 2, fill = False) img.draw_circle(corner[1][0], corner[1][1], 5, color = (0, 0, 255), thickness = 2, fill = False) img.draw_circle(corner[2][0], corner[2][1], 5, color = (0, 0, 255), thickness = 2, fill = False) img.draw_circle(corner[3][0], corner[3][1], 5, color = (0, 0, 255), thickness = 2, fill = False) # 打印四个角点坐标, 角点1的数组是corner[0], 坐标就是(corner[0][0],corner[0][1]) # 角点检测输出的角点排序每次不一定一致,矩形左上的角点有可能是corner0,1,2,3其中一个 corner1_str = f"corner1 = ({corner[0][0]},{corner[0][1]})" corner2_str = f"corner2 = ({corner[1][0]},{corner[1][1]})" corner3_str = f"corner3 = ({corner[2][0]},{corner[2][1]})" corner4_str = f"corner4 = ({corner[3][0]},{corner[3][1]})" print(corner1_str + "\n" + corner2_str + "\n" + corner3_str + "\n" + corner4_str) # 显示到屏幕上,此部分会降低帧率 #lcd.show_image(img, 160, 120, 0, 0, zoom=0) #屏幕显示 #串口通信传输的数据 cx1=(int)(corner[0][0]*10) cy1=(int)(corner[0][1]*10) cx2=(int)(corner[1][0]*10) cy2=(int)(corner[1][1]*10) cx3=(int)(corner[2][0]*10) cy3=(int)(corner[2][1]*10) cx4=(int)(corner[3][0]*10) cy4=(int)(corner[3][1]*10) FH=bytearray([0x2C,0x12,cx1,cy1,cx2,cy2,cx3,cy3,cx4,cy4,0x5B]) uart.write(FH) cx1=0 cy1=0 cx2=0 cy2=0 cx3=0 cy3=0 cx4=0 cy4=0 # 打印帧率 print(clock.fps()) 下面请观察这幅代码截图:
(二)、STM32串口通信部分
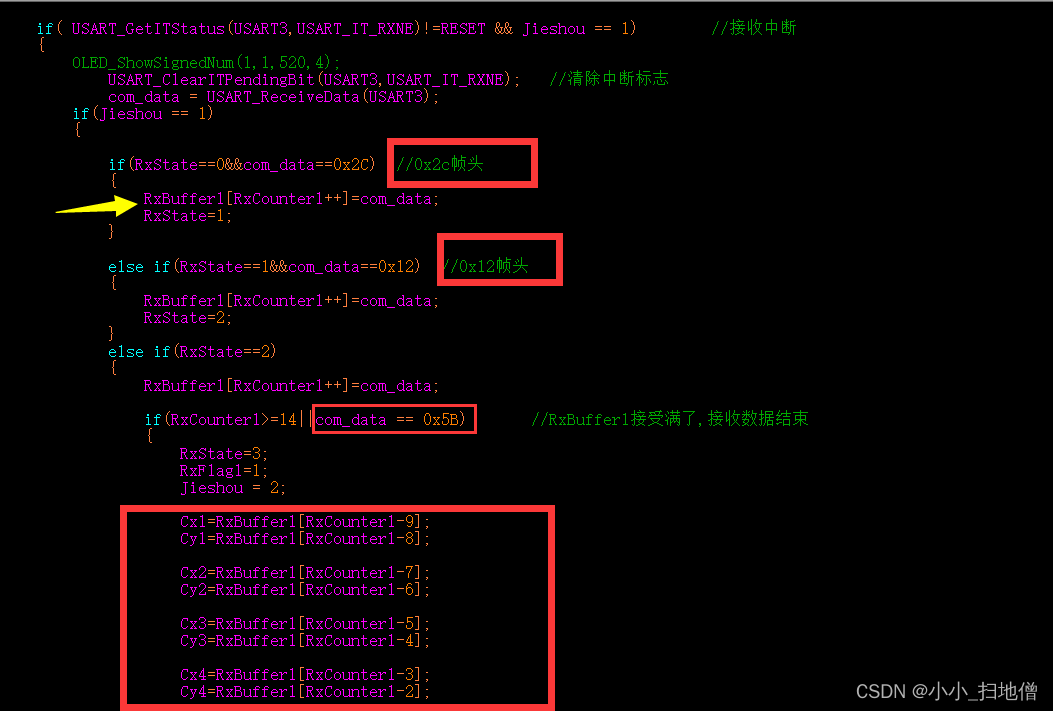
#include "stm32f10x.h" // Device header #include <stdio.h> #include <stdarg.h> #include "OLED.h" #include "LED.h" #include "Serial.h" uint8_t Serial_RxData; uint8_t Serial_RxFlag; static int16_t Cx1=0,Cy1=0,Cx2=0,Cy2=0,Cx3=0,Cy3=0,Cx4=0,Cy4=0; int Cx5[16];//用于存放分段求的坐标值 int Cy5[16]; //static u8 RxFlag1 = 0;//串口中断接收标志位 extern float Ang1,Ang2,AngFlag; extern float Angle1,Angle2; int avel_X1 ; int avel_X2 ; int avel_X3 ; int avel_X4 ; int avel_Y1 ; int avel_Y2 ; int avel_Y3 ; int avel_Y4 ; void Serial_Init(void) { RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //TX GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); //RX GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); USART_InitTypeDef USART_InitStructure; USART_InitStructure.USART_BaudRate = 115200; USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx; USART_InitStructure.USART_Parity = USART_Parity_No; USART_InitStructure.USART_StopBits = USART_StopBits_1; USART_InitStructure.USART_WordLength = USART_WordLength_8b; USART_Init(USART3, &USART_InitStructure); USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); NVIC_InitTypeDef NVIC_InitStructure; NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn; NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1; NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1; NVIC_Init(&NVIC_InitStructure); USART_Cmd(USART3, ENABLE); } void Serial_SendByte(uint8_t Byte) { USART_SendData(USART3, Byte); while (USART_GetFlagStatus(USART3, USART_FLAG_TXE) == RESET); } void Serial_SendArray(uint8_t *Array, uint16_t Length) { uint16_t i; for (i = 0; i < Length; i ++) { Serial_SendByte(Array[i]); } } void Serial_SendString(char *String) { uint8_t i; for (i = 0; String[i] != '\0'; i ++) { Serial_SendByte(String[i]); } } uint32_t Serial_Pow(uint32_t X, uint32_t Y) { uint32_t Result = 1; while (Y --) { Result *= X; } return Result; } void Serial_SendNumber(uint32_t Number, uint8_t Length) { uint8_t i; for (i = 0; i < Length; i ++) { Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0'); } } int fputc(int ch, FILE *f) { Serial_SendByte(ch); return ch; } void Serial_Printf(char *format, ...) { char String[100]; va_list arg; va_start(arg, format); vsprintf(String, format, arg); va_end(arg); Serial_SendString(String); } //USART3 全局中断服务函数 void USART3_IRQHandler(void) { int com_data; u8 i; u8 Jieshou = 1; static u8 RxCounter1=0; static int RxBuffer1[16]={0}; static u8 RxState = 0; static u8 RxFlag1 = 0;//串口中断接收标志位,已被移除至函数体外作为全局变量 if( USART_GetITStatus(USART3,USART_IT_RXNE)!=RESET && Jieshou == 1) //接收中断 { // OLED_ShowSignedNum(1,1,520,4); USART_ClearITPendingBit(USART3,USART_IT_RXNE); //清除中断标志 com_data = USART_ReceiveData(USART3); if(Jieshou == 1) { if(RxState==0&&com_data==0x2C) //0x2c帧头 { RxBuffer1[RxCounter1++]=com_data; RxState=1; } else if(RxState==1&&com_data==0x12) //0x12帧头 { RxBuffer1[RxCounter1++]=com_data; RxState=2; } else if(RxState==2) { RxBuffer1[RxCounter1++]=com_data; if(RxCounter1>=14||com_data == 0x5B) //RxBuffer1接受满了,接收数据结束 { RxState=3; RxFlag1=1; Jieshou = 2; Cx1=RxBuffer1[RxCounter1-9]; Cy1=RxBuffer1[RxCounter1-8]; Cx2=RxBuffer1[RxCounter1-7]; Cy2=RxBuffer1[RxCounter1-6]; Cx3=RxBuffer1[RxCounter1-5]; Cy3=RxBuffer1[RxCounter1-4]; Cx4=RxBuffer1[RxCounter1-3]; Cy4=RxBuffer1[RxCounter1-2]; OLED_ShowSignedNum(1,1,Cx1,4); OLED_ShowSignedNum(2,1,Cy1,4); OLED_ShowSignedNum(3,1,Cx2,4); OLED_ShowSignedNum(4,1,Cy2,4); OLED_ShowSignedNum(1,7,Cx3,4); OLED_ShowSignedNum(2,7,Cy3,4); OLED_ShowSignedNum(3,7,Cx4,4); OLED_ShowSignedNum(4,7,Cy4,4); } } } else if(RxState==3) //检测是否接受到结束标志 { if(RxBuffer1[RxCounter1-1] == 0x5B) { USART_ITConfig(USART3,USART_IT_RXNE,DISABLE);//关闭DTSABLE中断 if(RxFlag1) { AngFlag=0; HuanRaoZuoBiao(); // // OLED_ShowSignedNum(1,1,Cx1,4); // OLED_ShowSignedNum(2,1,Cx2,4); // OLED_ShowSignedNum(3,1,avel_X1,4); // OLED_ShowSignedNum(4,1,Cx5[0],4); AngFlag=1; RxFlag1 = 0; RxCounter1 = 0; RxState = 0; } USART_ITConfig(USART3,USART_IT_RXNE,ENABLE); } else //接收错误 { RxState = 0; RxCounter1=0; for(i=0;i<10;i++) { RxBuffer1[i]=0x00; //将存放数据数组清零 } } } else //接收异常 { RxState = 0; RxCounter1=0; for(i=0;i<10;i++) { RxBuffer1[i]=0x00; //将存放数据数组清零 } } } } 注意观察下面这副代码截图:
以上便是我对电赛期间OPENMV与单片机之间实现串口通信的代码实现。学者若有疑问或需要代码工程,可以私聊我。收到后我会及时回复。