阅读量:4
目录
目录
在AutoDL主机中安装桌面
参考连接VNC远程桌面配置教程
https://blog.csdn.net/AngelFK1990/article/details/130649525?spm=1001.2101.3001.6650.2&utm_medium=distribute.pc_relevant.none-task-blog-2%7Edefault%7EYuanLiJiHua%7EPosition-2-130649525-blog-78090079.235%5Ev38%5Epc_relevant_sort_base3&depth_1-utm_source=distribute.pc_relevant.none-task-blog-2%7Edefault%7EYuanLiJiHua%7EPosition-2-130649525-blog-78090079.235%5Ev38%5Epc_relevant_sort_base3&utm_relevant_index=5
主机开机后,可通过快捷工具JupyterLab登陆AutoDL主机,JupyterLab将打开本地浏览器页面
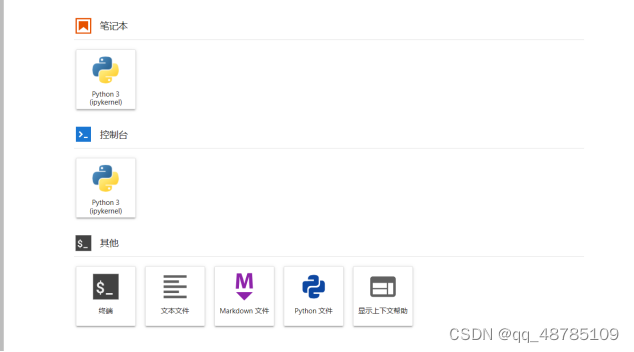
点击上述图片中的终端即可进入AutoDL主机的Terminal,AutoDL主机默认未安装桌面,进入主机Terminal后更新系统并安装桌面,因AutoDL主机系统盘只有25G,这里我们安装的桌面环境是轻量化的Xfce4
更新系统
apt-get update && apt-get upgrade -y
安装桌面
apt-get install xorg xdm xfce4
安装VNC
安装基本的依赖包
apt upda
te && apt install -y libglu1-mesa-dev mesa-utils xterm xauth x11-xkb-utils xfonts-base xkb-data libxtst6 libxv1
安装libjpeg-trubo和turbovnc
export TURBOVNC_VERSION=2.2.5
export LIBJPEG_VERSION=2.0.90
wget http://aivc.ks3-cn-beijing.ksyun.com/packages/libjpeg-turbo/\
libjpeg-turbo-official_${LIBJPEG_VERSION}_amd64.deb
wget http://aivc.ks3-cn-beijing.ksyun.com/packages/turbovnc\
/turbovnc_${TURBOVNC_VERSION}_amd64.deb
dpkg -i libjpeg-turbo-official_${LIBJPEG_VERSION}_amd64.deb
dpkg -i turbovnc_${TURBOVNC_VERSION}_amd64.deb
rm -rf *.deb
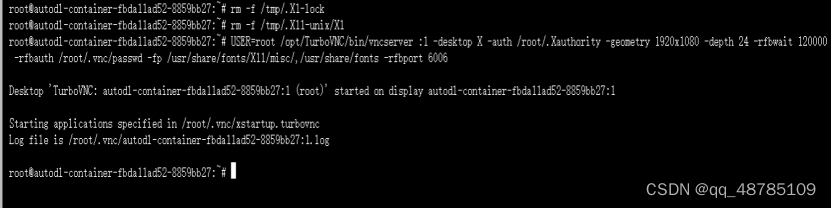
启动VNC服务
在6006端口启动VNC服务端:USER=root /opt/TurboVNC/bin/vncserver :1 -desktop X -auth /root/.Xauthority -geometry 1920x1080 -depth 24 -rfbwait 120000 -rfbauth /root/.vnc/passwd -fp /usr/share/fonts/X11/misc/,/usr/share/fonts -rfbport 6006
关闭被占用的文件rm -f /tmp/.X1-lock 和rm -f /tmp/.X11-unix/X1
SSH隧道
首先需要在本地安装openssh服务器
右键此电脑→属性→应用→可选功能→添加可选功能
找到OpenSSH服务器(注意是服务器不是OpenSSH客户端)
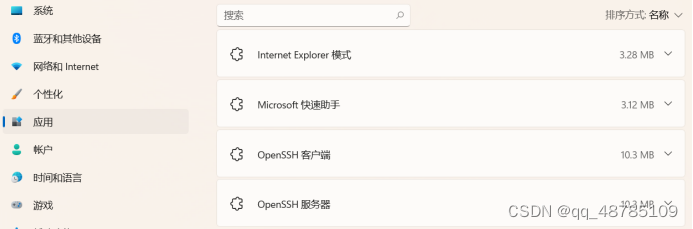
下载安装的本地。
服务开启
Win+S,键入服务,打开本地服务界面,找到OpenSSH SSH Server,启动方式改为自动
cmd或Windows PowerShell里键入net stop sshd,net start sshd 重启本地的 ssh 服务即可。
如提示下图可管理员权限运行
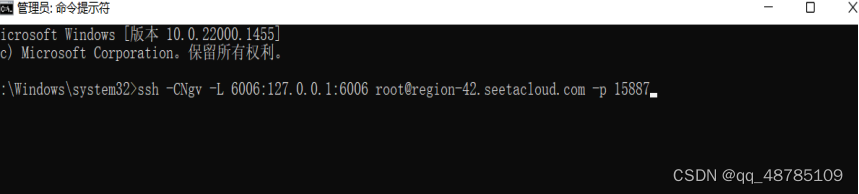
在本地的Terminal中执行命令:ssh -CNgv -L 6006:127.0.0.1:6006 root@region-1.autodl.com -p 37881
其中6006:127.0.0.1:6006指代理AutoDL主机vncserver的6006端口到本地的6006端口,root@region-1.autodl.com -p 37881为登陆指令的访问地址与端口。
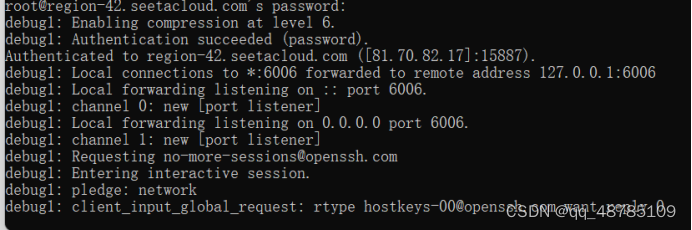
执行上述指令后需要输入登陆密码登陆AutoDL主机,保持该输入该命令后Terminal的开启状态,关闭后会杀掉进程,导致VNC Viewer登陆失败。
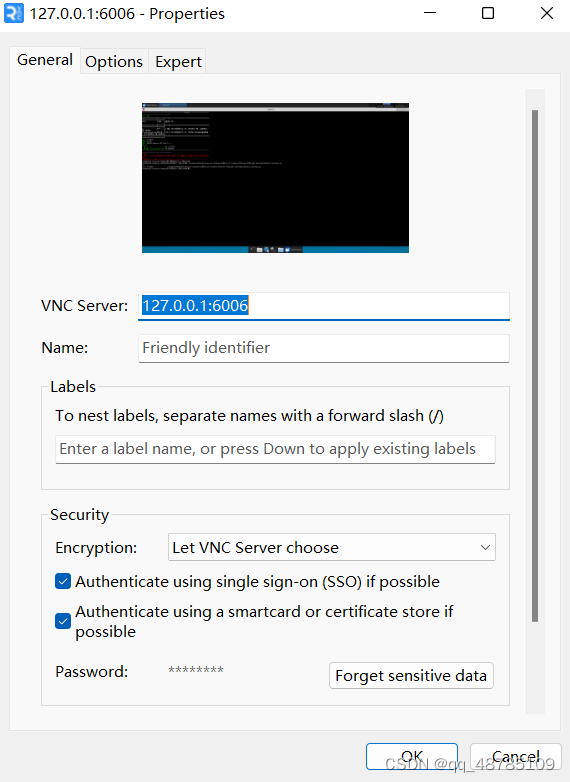
VNC Viewer客户端登陆
在本地下载VNC Viewer客户端,在VNC Server栏输入127.0.0.1:6006,点击OK即可登陆远程桌面,这里还需要输入前面在AutoDL主机Terminal中启动VNC服务器时设置的密码。
安装ORB_SLAM2并测试运行数据集
首先执行下面的语句
git clone https://github.com/raulmur/ORB_SLAM2.git ORB_SLAM2
cd ORB_SLAM2
chmod +x build.sh
将build.sh文件和build_ros.sh中的make -j改为make
打开下列文件加入头文件代码
#include<unistd.h>
修改~/ORB_SLAM2/Examples/ROS/ORB_SLAM2/文件夹下的CMakeLists.txt文件,在set(LIBS xxxxx 的后面加上下列这一句代码
-lboost_system
如图所示

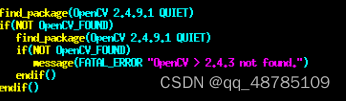
打开~/ORB_SLAM2/CMakeLists.txt文件,将find_package(OpenCV …)这行代码中的opencv版本号改成自己安装的opencv版本号,如下图所示
完成以上步骤后,进入ORB_SLAM2文件夹进行编译
./build.sh
mkdir build
cd build
cmake ..
Make
完成ORB-SLAM2的安装
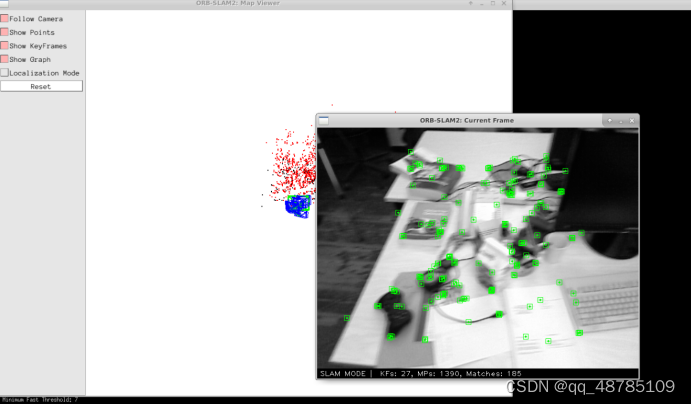
运行数据集
首先执行命令安装所需的依赖文件
sudo apt-get install libcanberra-gtk-module
按照图示点击下载第一个文件
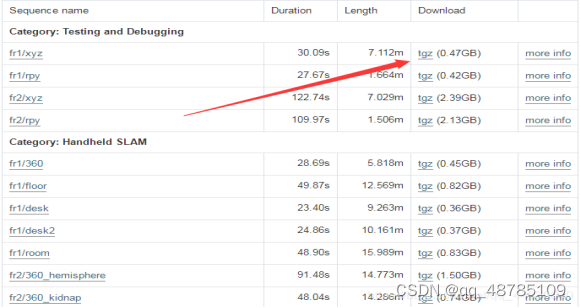
下载完成后解压缩到ORB_SLAM2文件夹下的data,进入ORB_SLAM2文件夹进行编译
- 解压.tgz文件:
- 解压到当前文件夹
命令:tar zxvf 文件名.tgz -C ./
- 解压到指定文件夹下
命令:tar zxvf 文件名.tgz -C /指定路径
执行命令
cd ORB_SLAM2
./Examples/Monocular/mono_tumVocabulary/ORBvoc.txt Examples/Monocular/TUM1.yaml data/rgbd_dataset_freiburg1_xyz